PLC控制三相步进电机正反转设计
下载需积分: 9 | DOC格式 | 219KB |
更新于2024-07-25
| 127 浏览量 | 举报
"这篇文档是关于使用PLC控制三相六拍步进电动机的课程设计,主要涉及电动机的正反转控制、速度调整以及步进电动机的工作原理和PLC编程的应用。"
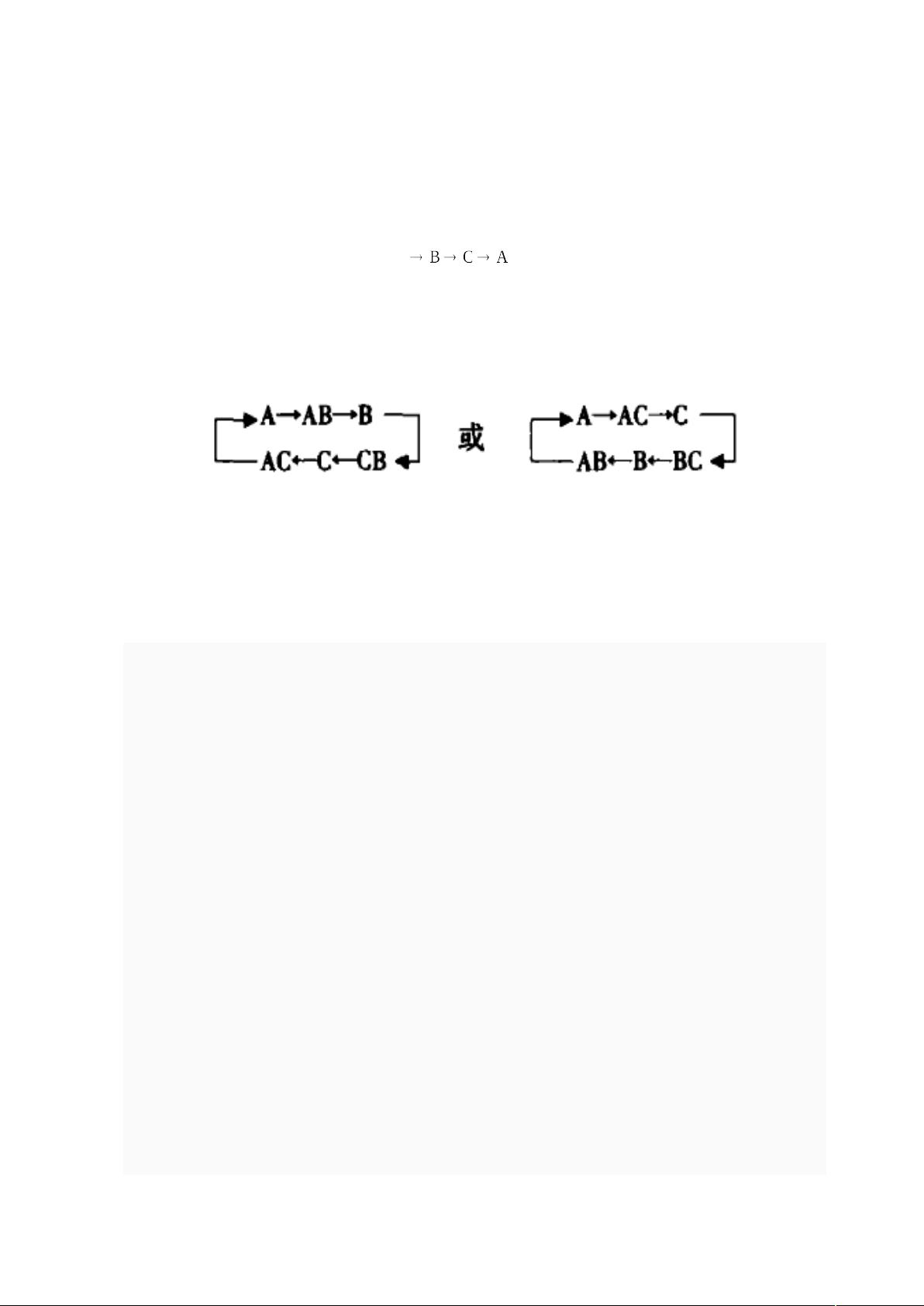
在电动机控制领域,三相步进电动机因其精确的定位和可控的旋转角度而被广泛应用。在本课程设计中,使用的是三相六拍运行模式,这意味着电动机的三个绕组A、B、C会按照特定的顺序通电,以实现正转或反转。正转的通电顺序是A→AB→B→BC→C→CA→A,而反转则是A→CA→C→BC→B→AB→A。这样的通电方式使得电动机能够以固定的角度逐步转动。
课程设计的任务包括了以下几点:首先,设计者需要确定输入输出点的分配,绘制PLC输入输出设备的接线图;其次,使用STEP7-Micro/WIN32软件编写并调试梯形图和指令表程序;最后,编写课程设计说明书。设计的重点在于通过PLC控制步进电动机的速度和方向,以及实现特定步距角后的自动停止功能。
步进电动机的速度控制主要通过改变输入脉冲的频率来实现。频率越高,电动机转速越快;反之,频率降低则转速下降。通过调整频率,不仅可以控制速度,还能提高位置精度。在控制系统中,PLC负责产生控制脉冲,并通过编程控制脉冲的数量和频率来控制电动机的旋转角度和伺服机构的进给量。此外,步进电机的转向可以通过改变各绕组的通电顺序来实现,这通常通过PLC输出的控制信号改变硬件环行分配器的输出顺序或者直接编程改变脉冲顺序来完成。
选择S7-200系列PLC的优势在于它的简单控制、稳定性以及成本效益。为了克服PLC扫描方式可能导致的输入输出滞后问题,设计的程序应尽可能简洁和紧凑。同时,考虑到未来可能的工艺流程变化,程序应具备良好的可修改性和灵活性。SIMATIC移位指令在此类控制中尤为适用,因为它可以很好地适应步进控制的需求。
这个课程设计涵盖了步进电动机的基础理论、PLC编程实践以及控制系统的实际应用,旨在培养学生综合运用理论知识解决实际工程问题的能力。通过这样的项目,学生不仅能掌握电动机的控制原理,还能熟练运用PLC技术进行系统设计和调试。
前或滞后转子齿 2/3 齿距角。
三相六拍步进电机的工作原理;当A相绕组通电时, 转子的齿与定子AA上的齿对齐。
若A相断电, B相通电, 由于磁力的作用, 转子的齿与定子BB上的齿对齐, 转子沿顺时针方
向转过3°, 如果控制线路不停地按A 的循环顺序控制步进电机绕组的通电、
断电, 步进电机的转子便不停地顺时针转动, 这是三相三拍。而当AB同时通电时, 由于
两个滋力的作用, 定子绕组的通电状态每改变一次, 转子转过1.5°,原理与三相三拍相
同,从而形成三相六拍, 其通电顺序为:
1.2 PLC 简介
1.2.1 可编程控器概述
可编程控制器(Programmable Controller)是计算机家族中的一员,是为工业控制应用
而设计制造的。早期的可编程控制器称作可编程逻辑控制器(Programmable Logic
Controller),简称 PLC,它主要用来代替继电器实现逻辑控制。随着技术的发展,这种
装置的功能已经大大超过了逻辑控制的范围,因此,今天这种装置称作可编程控制器,
简称 PC。但是为了避免与个人计算机(Personal Computer)的简称混淆,所以将可编程控
制器简称 PLC
1.2.2 可编程控制器的定义
可编程控制器简称 PC(英文全称:Programmable Controller),它经历了
可编程序矩阵控制器 PMC、可编程序顺序控制器 PSC、可编程序逻辑控制器
PLC(英文全称:Programmable Logic Controller)和可编程序控制器 PC 几
个不同时期。为与个人计算机(PC)相区别,现在仍然沿用可编程逻辑控制器这个
老名字。
1987 年国际电工委员会(International Electrical Committee)颁布的
PLC 标准草案中对 PLC 做了如下定义:
“PLC 是一种专门为在工业环境下应用而设计的数字运算操作的电子装置。它采用可以编制程
序的存储器,用来在其内部存储执行逻辑运算、顺序运算、计时、计数和算术运算等操作的指令,
并能通过数字式或模拟式的输入和输出,控制各种类型的机械或生产过程。PLC 及其有关的外围设
备都应该按易于与工业控制系统形成一个整体,易于扩展其功能的原则而设计。”
1.2.3 PLC 的特点
1.可靠性高,抗干扰能力强;
4
下载后可阅读完整内容,剩余18页未读,立即下载
相关推荐




a569064474
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开








最新资源
- SpringBoot快速搭建与Maven整合实践教程
- Android Socket聊天应用开发与实现
- 2017年软件设计师考试真题与解析
- STM32F446基于KEIL5与HAL库的工程模板开发
- Android与Linux服务器间实现注册登录数据交互
- 精选金融投资理财PPT背景图片合集下载
- 使用HtmlAgilityPack解析服务器端HTML文档的方法
- 掌握adb和fastboot工具使用技巧
- 高效滚屏截图神器 FSCapture87 Protable
- Android文本转PDF保存技巧及Canvas图形导出
- 基于CentOS的Linux入门实践指南
- 基于Servlet的简易电商项目实现指南
- Code::Blocks 17.12 MingW 安装与汉化教程
- 科技星空主题PPT背景图片蓝色地球图集
- BluescreenView v1.55:64位蓝屏错误分析软件
- 自定义Alert弹窗样式的实现与应用











