S7200自控原理:定时中断与PID指令详解
需积分: 10 46 浏览量
更新于2024-07-29
收藏 1.2MB PPT 举报
本章节深入探讨了西门子S7200系列PLC的自控原理,重点聚焦在综合控制中的关键概念和技术。首先,我们了解到S7200 PLC拥有丰富的中断系统,包括通信中断、输入/输出中断和时基中断,其中定时中断(如定时中断0和1)常用于处理模拟量的定时采样、转换和PID控制。定时中断的管理涉及全局性中断允许和禁止操作,通过使用ENI和DISI指令,以及ATCH和DTCH指令来配置和控制中断事件。
中断指令的结构包括中断程序号INT(0-127)和中断事件号EVNT(0-33),不同的CPU型号支持的中断范围有所不同。举例来说,PID指令在控制中起着核心作用,其输出M(t)与误差信号e(t)的关系遵循经典的PID控制公式。PID控制器由比例(KC)、积分(TI)和微分(TD)三个参数组成,它们共同决定了系统的动态响应。
为了实现连续控制系统到离散控制的转换,采样周期Ts引入了离散化的概念,使得PID控制能够在数字环境中有效运行。在S7200中,PID指令的具体形式体现了这些离散化过程,包括对偏差e(t)、输出M(t)等信号的处理。
这个章节深入剖析了S7200 PLC的中断机制和PID控制算法在实际应用中的实现细节,对于理解和设计基于S7200的工业自动化系统具有重要意义。通过掌握这些原理,工程师能够更好地编程和调试控制设备,确保系统的稳定性和精度。
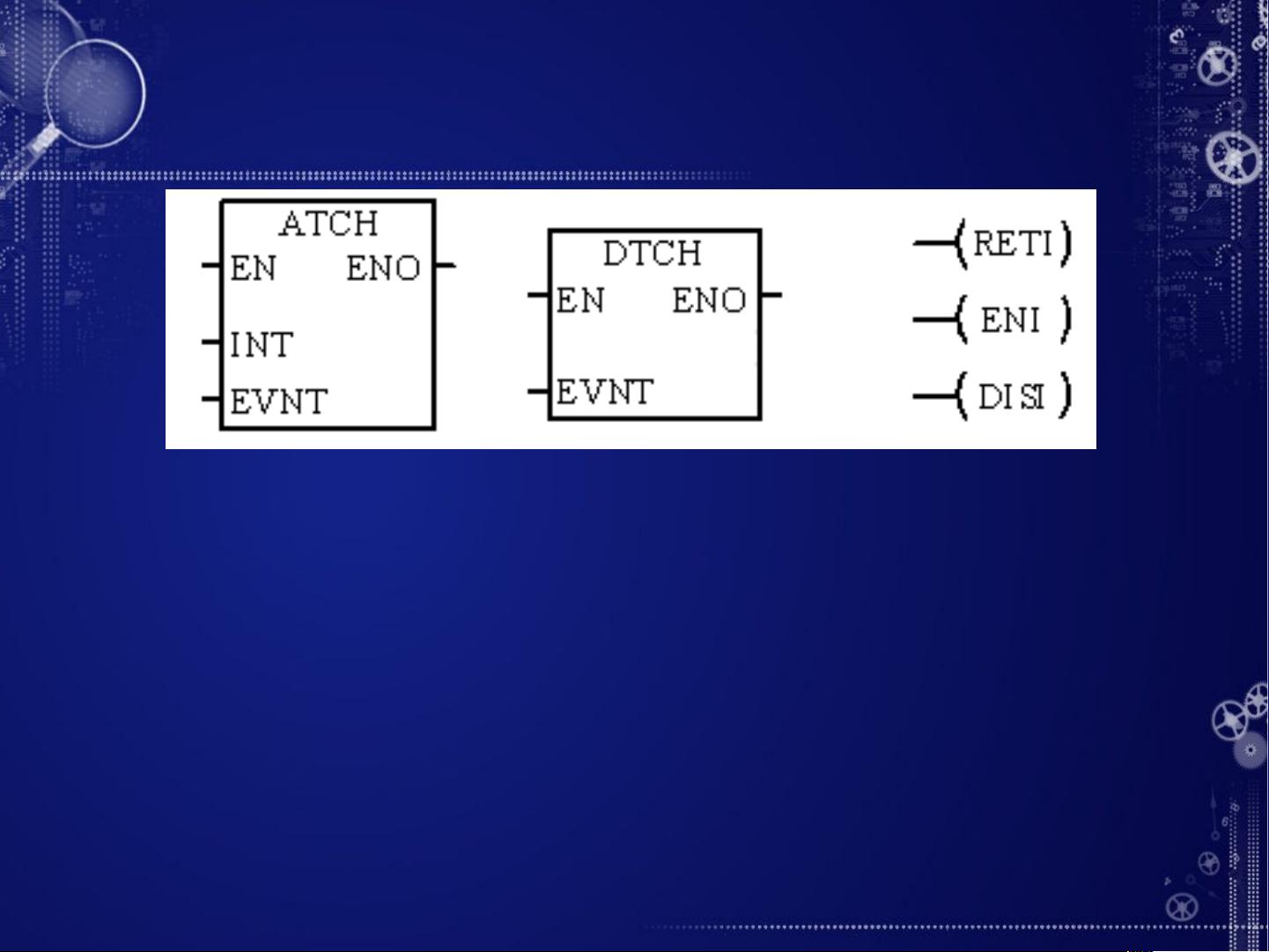
4 条中断指令
INT--- 中断程序号 INT_0 - INT_127( 最多可有
128 个中断程序 )
EVNT--- 中断事件号 中断号 0-33
CPU221 和 222 可以为: 0 到 12 , 19 到 23 和
27 和 33 ;
CPU224 可以为: 0 到 23 和 27 和 33 ;
CPU226 和 CPU226XM 可以为: 0 到 33
剩余19页未读,继续阅读
2021 浏览量
385 浏览量
2335 浏览量
127 浏览量
346 浏览量
465 浏览量
244 浏览量
148 浏览量
225 浏览量









