OpenGL实现的机器人三维仿真环境设计
版权申诉
118 浏览量
更新于2024-06-23
收藏 1015KB DOC 举报
"基于OpenGL的机器人三维仿真环境设计"
在机器人技术的研究中,三维仿真环境扮演着至关重要的角色,它能够帮助研究人员在实际操作前验证设计理念、优化机器人性能和避免潜在风险。基于OpenGL的机器人三维仿真环境设计就是这样一个关键工具,它利用OpenGL的强大图形处理能力,构建出逼真的机器人模型及其工作场景。
OpenGL,全称Open Graphics Library,是一个跨语言、跨平台的应用程序编程接口(API),专门用于渲染二维和三维图像。在机器人三维仿真中,OpenGL被用来创建和显示复杂的几何形状,如机器人关节、机械臂、传感器等部件,以及它们在空间中的动态运动。
本文首先在第一章绪论中介绍了机器人仿真技术的重要性,以及基于OpenGL的仿真环境在机器人研究中的地位和价值。随着机器人技术的发展,仿真系统的需求日益增长,提供了一个安全、灵活的平台,使得机器人设计与测试可以在虚拟环境中进行。
第二章主要探讨了基于OpenGL的三维仿真图形设计。这部分内容涵盖了OpenGL的基本概念、函数库的使用,以及如何利用OpenGL构建三维场景,包括光照、纹理映射和深度缓冲等关键技术,以实现逼真的视觉效果。
第三章专注于仿人机器人的三维建模。建模过程涉及到将机器人实体转化为数字模型,包括各个部件的几何形状、材料属性和运动学特性。使用OpenGL可以精细地表示机器人的关节结构,以及它们如何在三维空间中运动。
第四章则深入到仿人机器人运动学仿真。运动学是机器人科学中的核心部分,涉及到机器人的位置、速度和加速度计算。这部分会讲解如何使用OpenGL结合机器人运动学原理,模拟机器人的运动行为,包括正向运动学(从关节角度到末端执行器位置的转换)和逆向运动学(从目标位置到关节角度的计算)。
在最后一章的总结中,作者可能会回顾整个项目的关键成果,包括所实现的仿真功能,遇到的技术挑战以及解决方案。此外,也可能会讨论未来可能的研究方向,如增强仿真环境的真实感、提高计算效率,或者将仿真系统与其他先进技术(如人工智能和机器学习)相结合。
这篇文档详细阐述了如何利用OpenGL构建一个用于仿人机器人研究的三维仿真环境,对于理解机器人仿真技术以及OpenGL在该领域的应用具有很高的参考价值。通过这样的仿真系统,可以推动机器人技术的创新和发展,为机器人研究和教育提供有力支持。
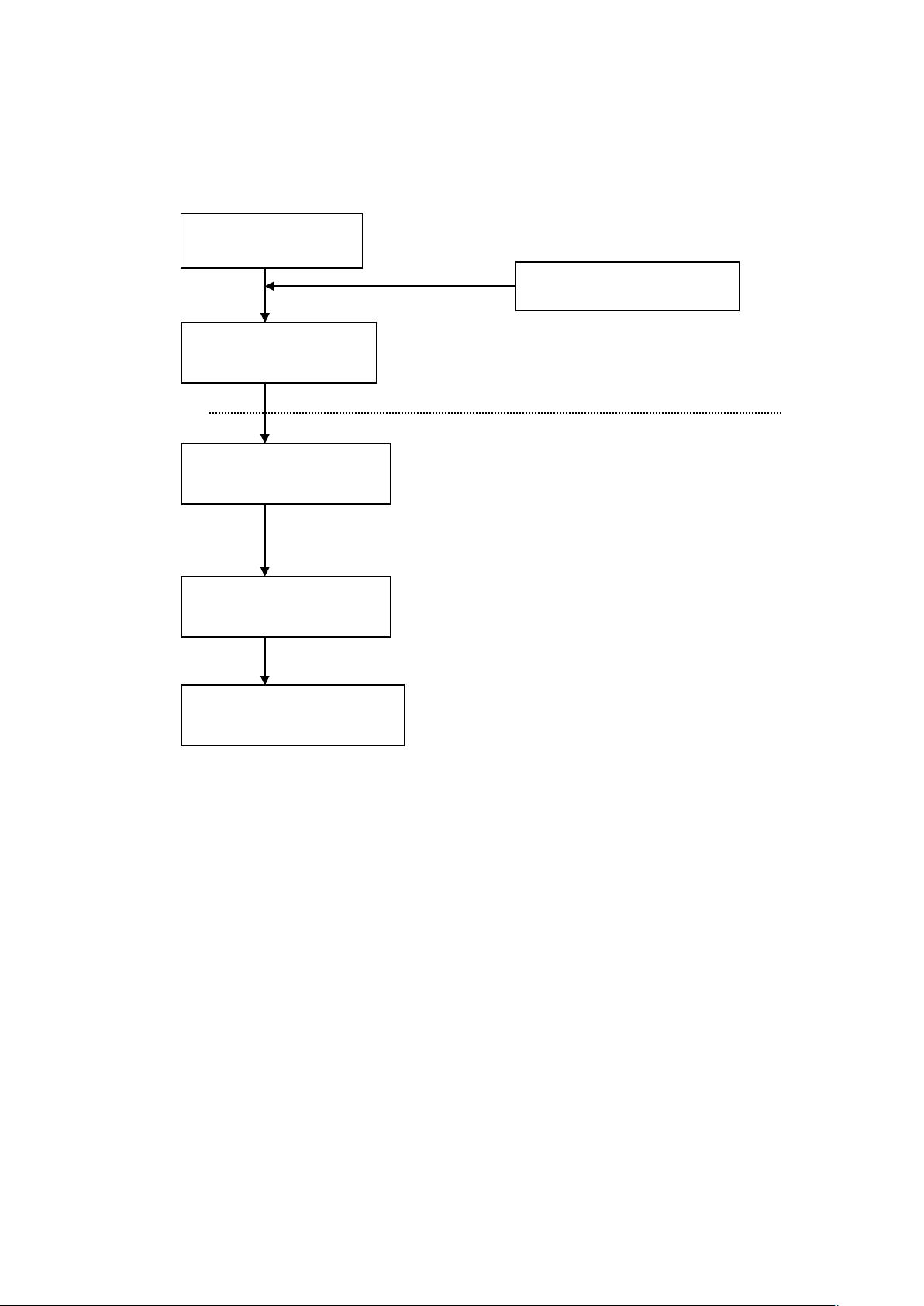
Winsry.dll 进一步进行处理,然后传递给 DDI(DeviceDriveInterfaee),最后传递给
视频显示驱动程序。图 2.1 显示了这一过程
图 2.1 Windows 环境下 OpenGL 的工作结构
三、OpenGL 的工作过程
作为图形硬件的软件接口,OpenGL 的最主要的工作就是将二维或三维物体
描绘至帧缓存。这些物体由一系列的描述物体几何性质的顶点(Vertex)或描述图
像的像素组成。OpenGL 执行一系列的操作把这些数据最终转化成像素数据并在
帧存中形成最后的结果。下面概要性介绍 OpenGL 工作:
1、图元操作与指令
OpenGL 由一组顶点定义。该组顶点既可以只包括一个顶点,也可以包括多
个顶点。顶点的说明由位置坐标、颜色值、法向量和纹理坐标组成。每个顶点可
以被顺序或以相同的方式独立地处理。每个顶点根据其为二维或三维顶点可以分
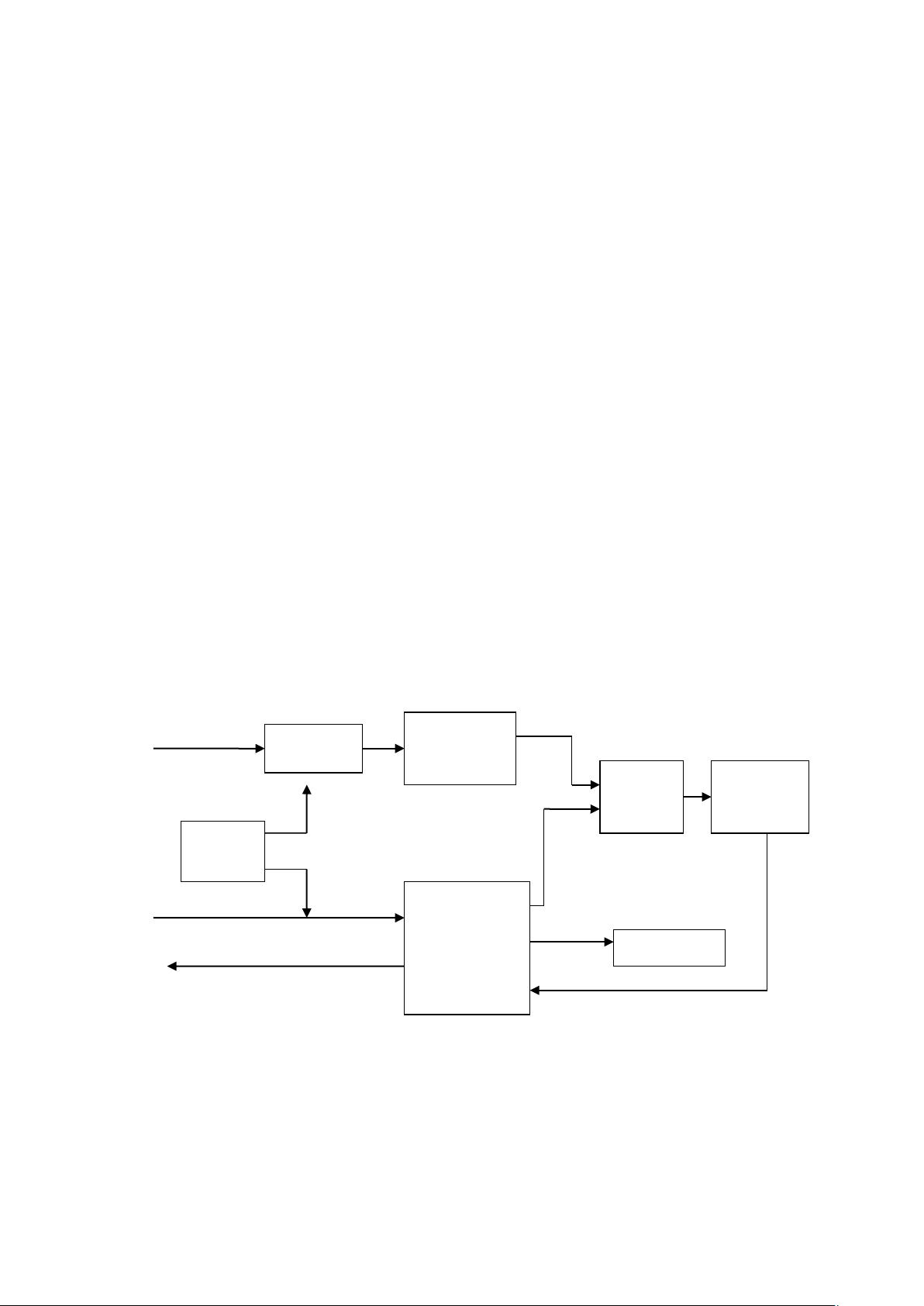
OpenGL Dll
服务器 Dll
Win32 Dll
视频驱动程序
OpenGL 指令
客户
服务器
客户应用程序
剩余47页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2023-07-13 上传
2019-09-05 上传
2011-04-22 上传
2023-07-12 上传
2023-07-11 上传
2022-12-01 上传

老帽爬新坡
- 粉丝: 93
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular实现MarcHayek简历展示应用教程
- Crossbow Spot最新更新 - 获取Chrome扩展新闻
- 量子管道网络优化与Python实现
- Debian系统中APT缓存维护工具的使用方法与实践
- Python模块AccessControl的Windows64位安装文件介绍
- 掌握最新*** Fisher资讯,使用Google Chrome扩展
- Ember应用程序开发流程与环境配置指南
- EZPCOpenSDK_v5.1.2_build***版本更新详情
- Postcode-Finder:利用JavaScript和Google Geocode API实现
- AWS商业交易监控器:航线行为分析与营销策略制定
- AccessControl-4.0b6压缩包详细使用教程
- Python编程实践与技巧汇总
- 使用Sikuli和Python打造颜色求解器项目
- .Net基础视频教程:掌握GDI绘图技术
- 深入理解数据结构与JavaScript实践项目
- 双子座在线裁判系统:提高编程竞赛效率
