领域知识驱动的多目标机器人路径规划新算法
77 浏览量
更新于2024-06-17
收藏 2.83MB PDF 举报
本文主要探讨了"基于领域知识的多目标路径规划算法研究",针对移动机器人路径规划问题,该问题的核心在于寻找一条从源点到单个或多个目标点的最优无碰撞路径。传统上,这个问题可能通过遗传算法来解决,尤其是对于具有单个和多个独立目标的情况。
作者Ritam Sarkara、Debaditya Barman和Nirmalya Chowdhury来自印度加尔各答Jadavpur大学计算机科学工程系和Visva-Bharati大学的计算机系统科学系,他们在文中提出了四种创新的基于领域知识的算子:电路消除算子、插入-删除算子、细化算子和目标对齐算子。前三者专门用于处理单目标路径规划,而所有四者都适用于多目标路径规划场景。
这些新算子旨在改进传统遗传算法在处理复杂动态环境中的性能,例如,当障碍物位置可变或出现/消失时。路径规划问题在这种环境下变得更加复杂,因为需要考虑如何在实时适应变化的环境中找到最优路径。作者强调,他们的方法在处理单一目标的路径规划问题上表现优于一些基于进化算法的传统解决方案。
论文在2020年收到了首次提交,并经过多次修订和审稿后,在2020年10月接受并在沙特国王大学学报上在线发布。文章采用CC BY-NC-ND许可证,这意味着读者可以在一定条件下自由地复制、修改和分发内容,但不能商业利用且必须注明原作者和来源。
本文是一项关键的贡献,它不仅提供了新的算法工具,还展示了在实际应用中如何通过结合领域知识优化移动机器人路径规划,尤其是在动态环境中的性能提升。这对于推进机器人技术的发展,特别是在自动化导航和物流等领域具有重要意义。
R. Sarkar
,
D.Barman
和
N.
乔杜里
沙特国王大学学报
4271
ð Þ
- 你
好
-
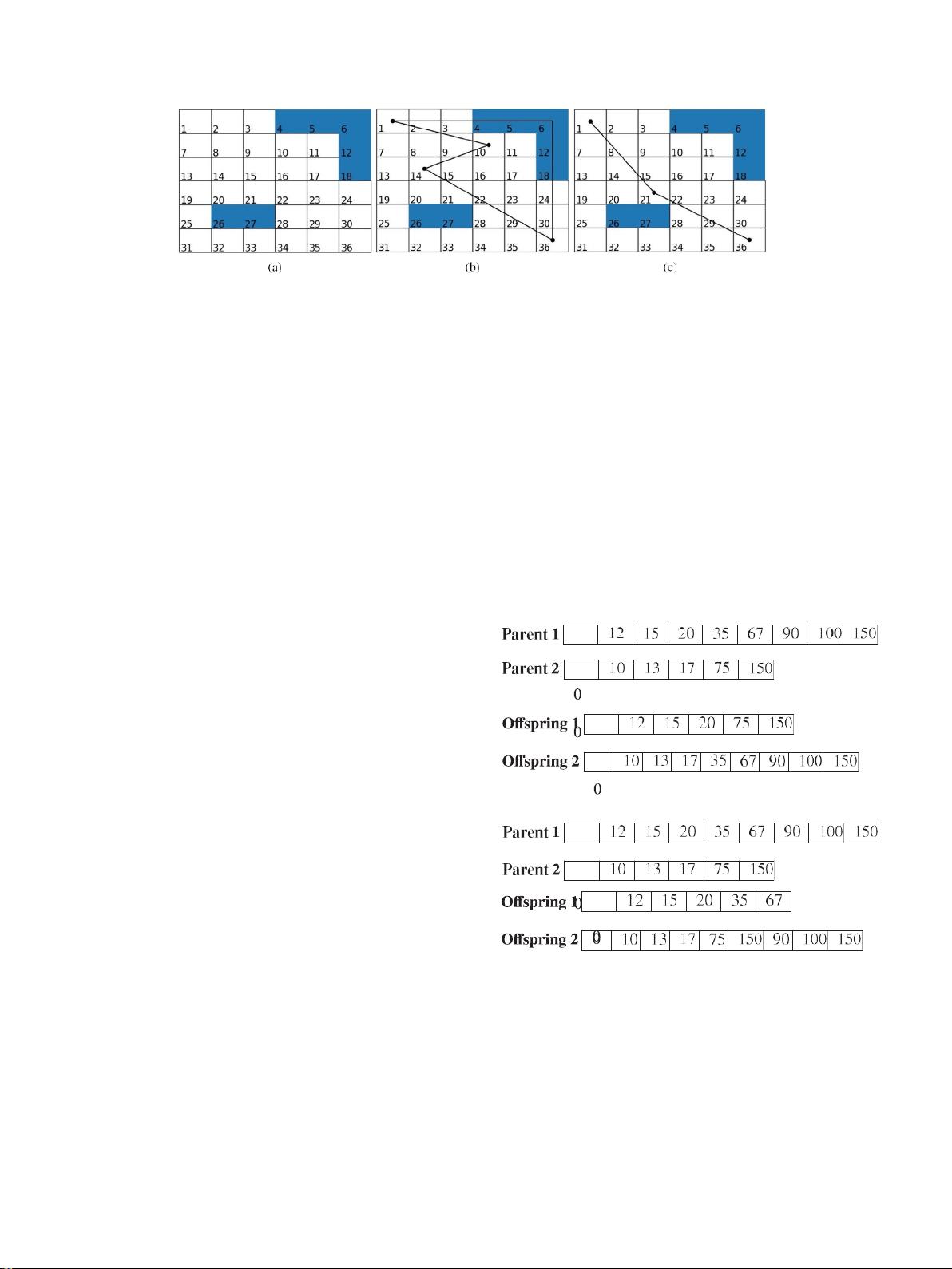
Fig. 1. (a)机器人
最后一个节点是目标节点。如果一条路径的每一段都通过了空白网
格,那么只有该路径可以被认为是可行路径,否则它就是不可行路
径。
1
(
b
)路径(
1
,
10
,
14
,
36
)是可行路径,而路径(
1
,
6
,
36
)是不可行路径。
3.1.3.
初始种群
初始种群中的个体或路径(也称为染色体)是随机生成的,没有
一个个体是不可行的。不可行项的存在对于一个特定的问题,随着人
口规模的增加,搜索过程变得更加多样化,但它引入了额外的计算成
本。因此,选择种群规模以保持搜索过程中的多样性和计算成本之间
的平衡是非常重要的此外,在文献中不存在为给定环境选择适当的种
群大小值的标准指南也不存在任何可以通过仅检查环境的大小、源和
目的地的位置、形状、大小以及环境中存在的障碍物的位置来测量环
境的复杂性水平的标准除此之外,不存在这样的方法,其产生用于特
定复杂性水平的环境的适当的群体大小。因此,唯一的解决方案是为
环境使用不同的种群大小,并选择在可接受的计算时间限制内提供最
佳结果同样,我们对每个环境使用了不同的种群大小,并报告了我们
在计算时间方面获得可接受结果的种群大小。
3.1.4.
健身
适应度函数用于评价群体中染色体设
P
是从起始结点到目标结点的
包含
n
个结点的路径由于距离已被视为优化标准,因此目标函数
f
(如
等式(
1
)所示)(
1
)路径
P
需要最小化。
X
n
q
2
2
注意,由于惩罚分数增加了适应度值,因此选择不可行路径的概率降
低。
3.1.5.
遗传算子
有三个遗传算子。它们是选择,交换和突变.这三个遗传算子在下文
中进行了描述。
3.1.5.1.
选择
.
选择算子是基于
“
适者生存
”
的概念换句话说,特定染色
体的选择概率与该染色体的适应度值成比例从群体中选择染色体以创
建交配池,其大小与群体的大小相同
3.1.5.2.
交叉。
在交叉中,两个亲本染色体之间交换信息,并为下一代
产生两个后代。在这项工作中,我们使用了单点交叉,其中单点是从
除了起始节点和目标节点之外长度较短的父染色体中随机选择的。否
则,在执行交叉之后,可能存在在子弹簧之一中具有多个开始节点或
目标节点而在另一子弹簧中没有开始节点或目标节点的机会
1/1
.
ð1 Þ
¼
惩罚;惩罚
b.如果路径P不可行
0;如果路径P可行
由方程式(1),
xi
和
xi
≠
1
是第i
个
的x坐标, 分别是路径P的
第
1个节
点。类似地,
yi
和yi
1
是路径P的第i个和第i 1个节点
的
y
坐标
,
penalty
表示路径
P
的罚分。如果路径
P
被发现是不可行路径,则它等
于环境中可能的最大路径段(即b),否则为零。
由于该路径规划问题的目的是获得从起始节点到目标节点的最短
可行路径,因此我们需要最小化等式中给出的目标函数
f
(一)
.
可能
如交叉的示例
-1
所示,父
1
和父
2
是父染色体,其中
0
是起始节点,
150
是目标节点。假设,第四个位置已经被随机选择用于交叉。结
果,其余部分(即第四位置之后的部分)已经在亲本染色体之间交
换,以产生后代。但是根据交叉的例子
-2
中所示的交叉
f¼
x
i
þ ðy
iþ1
-y
i
Þ
罚金
刑
剩余14页未读,继续阅读
330 浏览量
340 浏览量
127 浏览量
109 浏览量
164 浏览量
1003 浏览量
1495 浏览量
2024-05-22 上传

cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- Web远程教学系统需求分析指南
- 禅道6.2版本发布,优化测试流程,提高安全性
- Netty传输层API中文文档及资源包免费下载
- 超凡搜索:引领搜索领域的创新神器
- JavaWeb租房系统实现与代码参考指南
- 老冀文章编辑工具v1.8:文章编辑的自动化解决方案
- MovieLens 1m数据集深度解析:数据库设计与电影属性
- TypeScript实现tca-flip-coins模拟硬币翻转算法
- Directshow实现多路视频采集与传输技术
- 百度editor实现无限制附件上传功能
- C语言二级上机模拟题与VC6.0完整版
- A*算法解决八数码问题:AI领域的经典案例
- Android版SeetaFace JNI程序实现人脸检测与对齐
- 热交换器效率提升技术手册
- WinCE平台CPU占用率精确测试工具介绍
- JavaScript实现的压缩包子算法解读
