基于CAN总线的开关磁阻电机远程控制系统研究
37 浏览量
更新于2024-08-30
收藏 296KB PDF 举报
"嵌入式系统/ARM技术中的基于CAN总线的开关磁阻电机远程控制系统的研究"
在工业自动化领域,开关磁阻电机(Switched Reluctance Motor, SRD)因其结构简单、成本低、效率高等优点而广泛应用。然而,在复杂的环境和广阔的地域条件下,对SRD的调速控制和参数监控面临诸多挑战。为了克服这些困难,设计一个基于CAN(Controller Area Network)总线的远程控制系统显得尤为关键。CAN总线以其高可靠性、实时性和灵活性成为理想的通信选择,尤其适合于远程监控任务。
传统的SRD调速系统通常依赖于PID(比例-积分-微分)控制器,但PID控制在面对复杂的动态环境时可能无法保持良好的性能。为此,研究者们开始探索神经网络控制和模糊控制技术,这些先进的控制策略已显示出在SRD应用中提升性能的潜力。
卡尔曼滤波器是一种有效的数据处理工具,尤其在存在过程噪声和测量误差的情况下,能够通过递推算法来估计系统状态。在本文中,卡尔曼滤波被引入到PID控制器中,以增强SRD系统的控制效果,实现更精确的电机参数监控和控制。
系统设计方案包括四个主要部分:上位机(通常是PC)、RS-485与CAN结合的通信网络、CAN智能节点以及开关磁阻电机本身。由于RS-232C接口传输距离有限,选择RS-485标准能确保长距离的通信需求。通过使用RS-232-RS485转换板,上位机可以与远端的CAN智能节点进行有效通信。这种结合RS-485与CAN的网络设计提高了系统的可靠性和经济效益。
这个基于CAN总线的开关磁阻电机远程控制系统利用了先进的控制理论和通信技术,实现了高效、可靠的电机控制,特别是在困难的工作环境中。嵌入式系统,尤其是ARM技术,作为硬件基础,为这种复杂的控制系统提供了计算和处理能力。通过整合卡尔曼滤波和智能控制策略,系统能够更好地应对动态变化,提升了SRD的控制精度和整体性能。
嵌入式系统嵌入式系统/ARM技术中的基于技术中的基于CAN总线的开关磁阻电机远程总线的开关磁阻电机远程
控制系统的研究控制系统的研究
0 引 言 由于应用环境的复杂,地域的广阔等不利工作条件,给开关磁阻电机的调速控制与相关参数监控带
来了很多影响。因此,设计研制一种基于开关磁阻电机的远程控制系统(SRD)具有十分重要的现实意义。
Controller Area Network(简称CAN),与一般的总线相比,CAN总线的数据通信具有突出的可靠性、实时性和灵
活性。本文主要探讨基于RS-485与CAN总线的开关磁阻电机远程监控系统的构成。SRD调速系统通常采用传统
PID控制策略,系统很难保守良好性能。目前,神经网络控制与模糊控制技术应用于SRD取得了一定的成绩。
卡尔曼滤算法是一种递推算法,对于系统存在过程及测量
0 引 言
由于应用环境的复杂,地域的广阔等不利工作条件,给开关磁阻电机的调速控制与相关参数监控带来了很多影响。因此,
设计研制一种基于开关磁阻电机的远程控制系统(SRD)具有十分重要的现实意义。
Controller Area Network(简称CAN),与一般的总线相比,CAN总线的数据通信具有突出的可靠性、实时性和灵活性。本
文主要探讨基于RS-485与CAN总线的开关磁阻电机远程监控系统的构成。SRD调速系统通常采用传统PID控制策略,系统很
难保守良好性能。目前,神经网络控制与模糊控制技术应用于SRD取得了一定的成绩。
卡尔曼滤算法是一种递推算法,对于系统存在过程及测量噪声,状态变量受到污染,可以利用卡尔曼滤波技术进行处理。
本文将卡尔曼滤波器与传统的PID控制相结合,使SRD控制效果得到明显改善。
1 系统设计方案
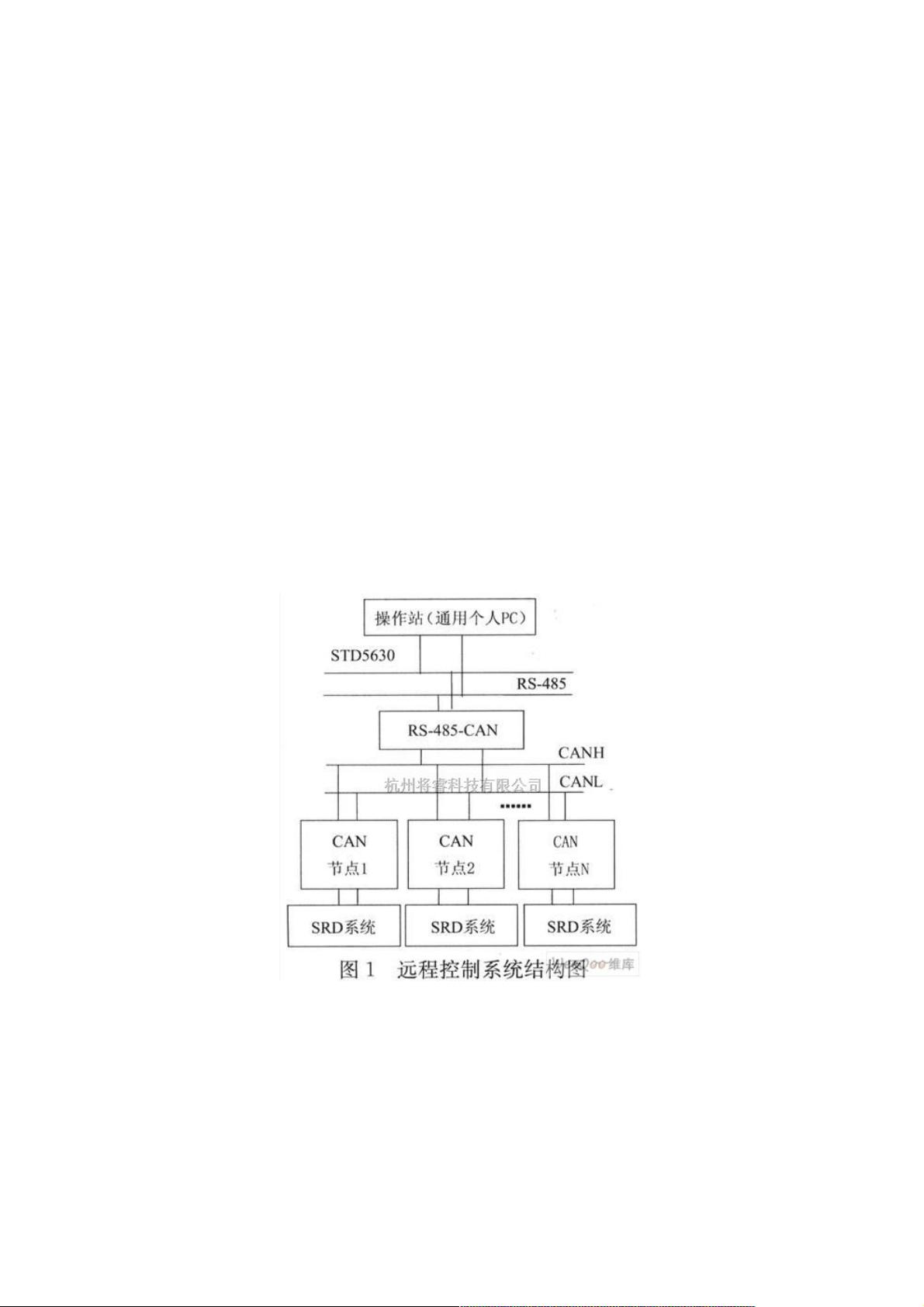
基于CAN总线的开关磁阻电机远程控制系统如图1所示。系统主要包括PC(上位机)、RS-485与CAN结合的通信网络、
CAN智能节点与开关组电机四大部分。串行接口标准的选择上位机与CAN智能节点间的距离通常较远,上位机的Rs-232C接
口的最大传输距离为15m,不能满足要求。而RS-485串行数据通信标准可传送1200m以上,因此宜选用后者。上位机本身具
有RS-232C接口,可配备一块RS232-RS485转换板STD5630,实现RS-232电平到RS-485电平的转换。
在该远程监控系统中,采用RS-485与CAN结合通信网络,节省了CAN适配卡与专门的驱动程序,因此可靠性与性价比得
到了较大的提高。
CAN总线智能节点在分布式控制系统中起着承上启下的作用。它位于执行机构所在的现场,一方面和上位机进行通信,
以完成数据交换;另一方面又可根据系统的需要对现场的执行机构进行控制和数据采集。典型的CAN总线控制节点是由微处
理器、CAN控制器、CAN接口构成,如图2所示。
下载后可阅读完整内容,剩余4页未读,立即下载
136 浏览量
475 浏览量
3079 浏览量
101 浏览量
347 浏览量
433 浏览量
点击了解资源详情
点击了解资源详情
点击了解资源详情

weixin_38736760
- 粉丝: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- Ruby语言集成Mandrill API的gem开发
- 开源嵌入式qt软键盘SYSZUXpinyin可移植源代码
- Kinect2.0实现高清面部特征精确对齐技术
- React与GitHub Jobs API整合的就业搜索应用
- MATLAB傅里叶变换函数应用实例分析
- 探索鼠标悬停特效的实现与应用
- 工行捷德U盾64位驱动程序安装指南
- Apache与Tomcat整合集群配置教程
- 成为JavaScript英雄:掌握be-the-hero-master技巧
- 深入实践Java编程珠玑:第13章源代码解析
- Proficy Maintenance Gateway软件:实时维护策略助力业务变革
- HTML5图片上传与编辑控件的实现
- RTDS环境下电网STATCOM模型的应用与分析
- 掌握Matlab下偏微分方程的有限元方法解析
- Aop原理与示例程序解读
- projete大语言项目登陆页面设计与实现
