STM32F427飞控板原理详解:TIM与I2C接口详解
本文档是一份关于STM32F427在无人飞机飞控系统中的原理图设计,由某专业飞控公司提供,旨在为相关设计人员提供技术参考。STM32F427是一款高性能的微控制器,特别适合于对实时性和处理能力要求较高的应用,如无人机控制。
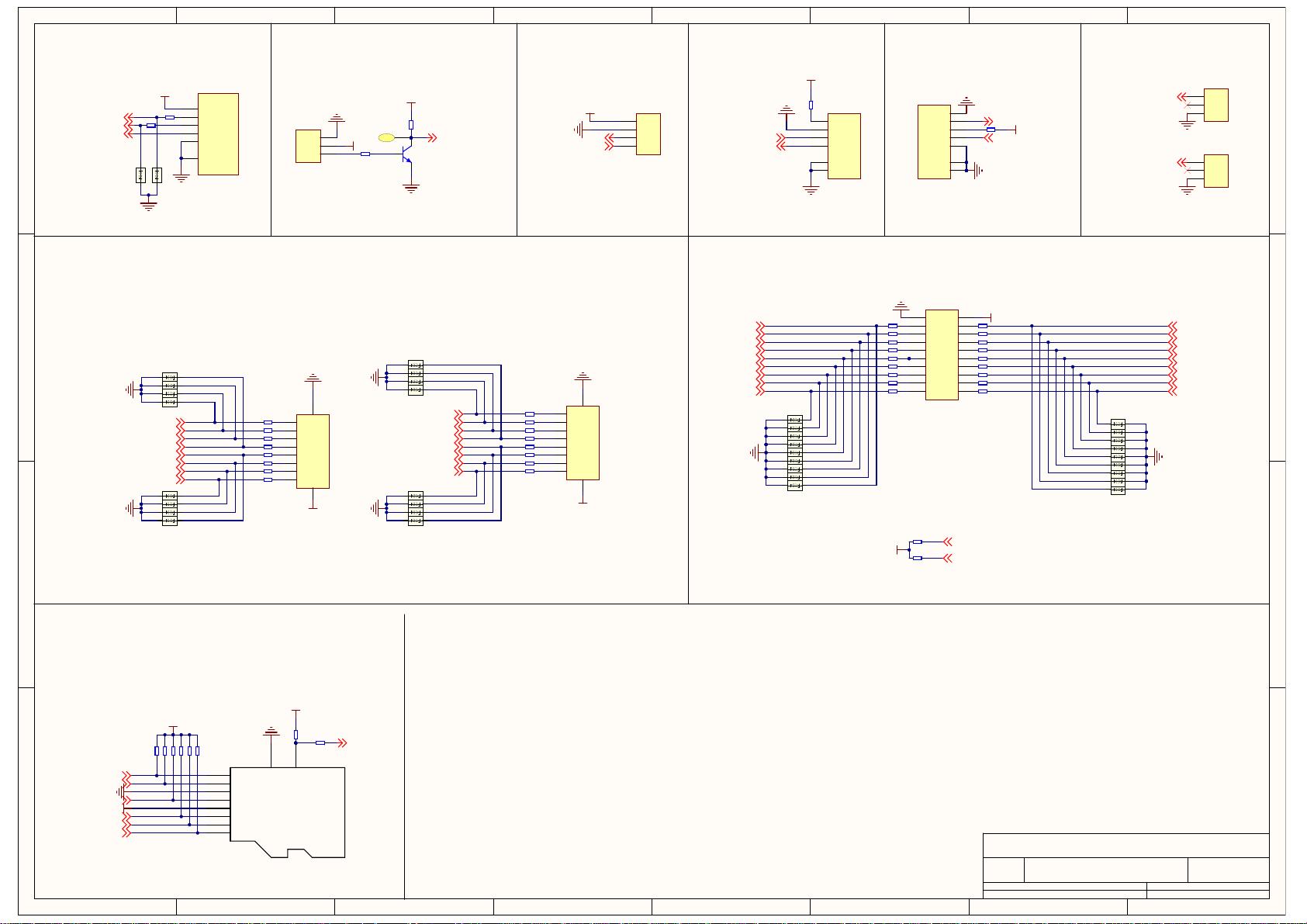
该原理图主要展示了飞控系统中STM32F427的电气连接和功能分配。首先,电源部分包括VCC (5V)、GND (地线)等,确保了芯片的供电稳定。STM32F427的数字输入输出接口被用于多个功能模块,如TIM2和TIM5的四个通道分别与PA0至PA3和PH10至PH12相连,可能用于计时、脉冲宽度调制或其他定时任务。I/O排针(P11和P10)用于连接外部传感器、执行器或通信接口。
通信模块方面,文档中提到了I2C2_SDA和I2C2_SCL引脚,这用于I2C通信,可能用于连接飞控系统的其他子系统或外部设备,如姿态传感器或无线模块。SPI4_NSS、SPI4_SCK、MISO和MOSI接口用于SPI通信,可能与存储设备、图像处理器或专用接口芯片配合工作。ADC1用于模拟信号的数字化,其多个输入引脚(PB0至PC5)用于采集来自环境或传感器的数据。
此外,还有两个数字模拟转换器(DAC),分别连接到PA4和PA5,可能用于执行电压控制或音频输出。还提到一个SDIO模块,用于连接存储卡,如TFcard,通过SDIO_D0至SDIO_D3和SDIO_CMD引脚进行数据传输和命令交换。外部中断引脚DAC_EXTI9和SD_EXTI用于处理外部事件。
电路中还包括了电阻器R49至R52,它们可能是电源滤波或信号调理用的,规格为10千欧姆、1%精度、0402封装。这些电阻的选择和布局对电路的性能和稳定性有重要影响。
总体来说,这份原理图提供了STM32F427在无人飞机飞控系统中的具体实施方案,帮助设计师理解如何利用这款微控制器的特性来构建复杂的控制系统,同时强调了电路布局和连接的重要性。对于从事飞控系统设计或使用STM32F427的工程师来说,理解和分析这份原理图是至关重要的一步。
1
1
2
2
3
3
4
4
5
5
6
6
7
7
8
8
D D
C C
B B
A A
1
1
2
2
3
3
4
4
5
5
6
6
7
7
8
8
VCC
9
GND
10
P11
排针x3
VCC5V_OUT
GND
TIM2_CH1(PA0)
TIM2_CH2(PA1)
TIM2_CH3(PA2)
TIM2_CH4(PA3) TIM5_CH1(PH10)
TIM5_CH2(PH11)
TIM5_CH3(PH12)
TIM5_CH4(PI0)
1
1
2
2
3
3
4
4
5
5
6
6
7
7
8
8
VCC
9
GND
10
P10
排针x3
VCC5V_OUT
GND
TIM4_CH1(PD12)
TIM4_CH2(PD13)
TIM4_CH3(PD14)
TIM4_CH4(PD15)
TIM8_CH1(PI5)
TIM8_CH2(PI6)
TIM8_CH3(PI7)
TIM8_CH4(PI2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
P9
Header 10X2A
I2C2_SDA(PF0)
SPI4_NSS(PE4)
SPI4_SCK(PE12)
ADC1_IN8(PB0)
ADC1_IN9(PB1)
ADC1_IN10(PC0)
ADC1_IN11(PC1)
DAC_OUT1(PA4)
DAC_EXTI9(PI9)
I2C2_SCL(PF1)
SPI4_MISO(PE5)
SPI4_MOSI(PE6)
ADC1_IN12(PC2)
ADC1_IN13(PC3)
ADC1_IN14(PC4)
ADC1_IN15(PC5)
DAC_OUT2(PA5)
PF10
GND
VCC5V_OUT
DAT2
1
DAT3
2
CMD
3
VDD
4
CLK
5
VSS
6
DAT0
7
DAT1
8
GND
9
SD
10
J2
TFcard-473521001
GND
SDIO_D1(PC9)
SDIO_D0(PC8)
SDIO_CK(PC12)
SDIO_CMD(PD2)
SDIO_D3(PC11)
SDIO_D2(PC10)
SD_EXTI(PE15)
VCC3V3
GND
R49
10K/1%/0402
R50
10K/1%/0402
R51
10K/1%/0402/NC
R52
10K/1%/0402
R53
10K/1%/0402
R54
10K/1%/0402
VCC3V3
R48
0R/1%/0402
R47
10K/1%/0402/NC
VCC3V3
增加IIC上拉电阻
VCC3V3
R73
4.7k/1%/0402
R72
4.7k/1%/0402
I2C2_SDA(PF0)
I2C2_SCL(PF1)
R85
100R/1%/0402
R89
100R/1%/0402
R93
100R/1%/0402
R97
100R/1%/0402
R101
100R/1%/0402
R103
100R/1%/0402
R105
100R/1%/0402
R107
100R/1%/0402
VBUS
1
DM
2
DP
3
ID
4
GND
5
SHELL
0
J1
MicroUSB
VBUS
R41
22R/5%/0402
R42
22R/5%/0402
USB_FS_DM(PA11)
USB_FS_DP(PA12)
USB_FS_ID(PA10)
GND
GND
VCC5V_OUT
GND
1
1
2
2
3
3
P8
P3*2.54
Q6
PMBT3904
R45
4.7k/1%/0402
R43
4.7k/1%/0402
USART1_RX(PB7)
VCC3V3
1
TP12
USART1_RX
1
2
3
4
P7
Header 4
VCC_5V_S
GND
USART2_RX(PD6)
USART2_TX(PD5)
1
1
2
2
3
3
4
4
PAD
0
PAD
0
5
5
P6
Molex-53261-5P
GND
GND
USART3_TX(PD8)
USART3_RX(PD9)
R44
0R/1%/0402/NC
VCC5V_OUT
GND
GND
R46
0R/1%/0402
VCC5V_OUT
USART6_RX(PG9)
USART6_TX(PG14)
1
2
3
4
PAD
PAD
P12
JST-SM04B-GHS-TBT
TIM12_CH1(PH6)
TIM12_CH2(PH9)
1
2
3
P15
Header 3
1
2
3
P16
Header 3
GND
GND
R82
100R/1%/0402
R86
100R/1%/0402
R90
100R/1%/0402
R94
100R/1%/0402
R98
100R/1%/0402
R102
100R/1%/0402
R104
100R/1%/0402
R106
100R/1%/0402
A CD11 PESD5V0V1BL
A CD12 PESD5V0V1BL
A CD16 PESD5V0V1BL
A CD18 PESD5V0V1BL
GND
A CD15 PESD5V0V1BL
A CD17 PESD5V0V1BL
A CD19 PESD5V0V1BL
A CD20 PESD5V0V1BL
GND
A CD27 PESD5V0V1BL
A CD31 PESD5V0V1BL
A CD35
PESD5V0V1BL
A CD39
PESD5V0V1BL
GND
A CD28 PESD5V0V1BL
A CD32 PESD5V0V1BL
A CD36 PESD5V0V1BL
A CD40 PESD5V0V1BL
GND
R74
100R/1%/0402
R76
100R/1%/0402
R78
100R/1%/0402
R80
100R/1%/0402
R83
100R/1%/0402
R87
100R/1%/0402
R91
100R/1%/0402
R95
100R/1%/0402
R99
100R/1%/0402
R75
100R/1%/0402
R77
100R/1%/0402
R79
100R/1%/0402
R81
100R/1%/0402
R84
100R/1%/0402
R88
100R/1%/0402
R92
100R/1%/0402
R96
100R/1%/0402
R100
100R/1%/0402
A C
D22
PESD5V0V1BL
A C
D24
PESD5V0V1BL
A C
D26
PESD5V0V1BL
A C
D30
PESD5V0V1BL
A C
D34
PESD5V0V1BL
A C
D38
PESD5V0V1BL
A C
D42
PESD5V0V1BL
A C
D44
PESD5V0V1BL
GND
A C
D46
PESD5V0V1BL
AC D45
PESD5V0V1BL
AC D43
PESD5V0V1BL
AC D41
PESD5V0V1BL
AC D37
PESD5V0V1BL
AC D33
PESD5V0V1BL
AC D29PESD5V0V1BL
AC D25
PESD5V0V1BL
AC D23
PESD5V0V1BL
GND
AC D21
PESD5V0V1BL
A C
D3
TPD1E05U06DPYT
A C
D4
TPD1E05U06DPYT
GND
16路PWM输出
用户接口
摩擦轮PWM接口
串口调试MOLEX接口串口调试JST接口
蓝牙串口(预留)
遥控器DBUS接口
USB接口
SDCard
PID30A
PID30C
COD3
PID40A
PID40C
COD4
PID110A
PID110C
COD11
PID120A
PID120C
COD12
PID150A PID150C
COD15
PID160A
PID160C
COD16
PID170A PID170C
COD17
PID180A
PID180C
COD18
PID190A PID190C
COD19
PID200A PID200C
COD20
PID210APID210C
COD21
PID220A
PID220C
COD22
PID230APID230C
COD23
PID240A
PID240C
COD24
PID250APID250C
COD25
PID260A
PID260C
COD26
PID270A PID270C
COD27
PID280A
PID280C
COD28
PID290APID290C
COD29
PID300A
PID300C
COD30
PID310A PID310C
COD31
PID320A
PID320C
COD32
PID330APID330C
COD33
PID340A
PID340C
COD34
PID350A PID350C
COD35
PID360A
PID360C
COD36
PID370APID370C
COD37
PID380A
PID380C
COD38
PID390A PID390C
COD39
PID400A
PID400C
COD40
PID410APID410C
COD41
PID420A
PID420C
COD42
PID430APID430C
COD43
PID440A
PID440C
COD44
PID450APID450C
COD45
PID460A
PID460C
COD46
PIJ100
PIJ101
PIJ102
PIJ103
PIJ104
PIJ105
COJ1
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIP600
PIP601
PIP602
PIP603
PIP604
PIP605
COP6
PIP701
PIP702
PIP703
PIP704
COP7
PIP801
PIP802
PIP803
COP8
PIP901
PIP902
PIP903
PIP904
PIP905
PIP906
PIP907
PIP908
PIP909
PIP9010
PIP9011
PIP9012
PIP9013
PIP9014
PIP9015
PIP9016
PIP9017
PIP9018
PIP9019
PIP9020
COP9
PIP1001
PIP1002
PIP1003
PIP1004
PIP1005
PIP1006
PIP1007
PIP1008
PIP1009
PIP10010
COP10
PIP1101
PIP1102
PIP1103
PIP1104
PIP1105
PIP1106
PIP1107
PIP1108
PIP1109
PIP11010
COP11
PIP1200
PIP1201
PIP1202
PIP1203
PIP1204
COP12
PIP1501
PIP1502
PIP1503
COP15
PIP1601
PIP1602
PIP1603
COP16
PIQ601
PIQ602
PIQ603
COQ6
PIR4101
PIR4102
COR41
PIR4201 PIR4202
COR42
PIR4301
PIR4302
COR43
PIR4401PIR4402
COR44
PIR4501PIR4502
COR45
PIR4601
PIR4602
COR46
PIR4701
PIR4702
COR47
PIR4801PIR4802
COR48
PIR4901
PIR4902
COR49
PIR5001
PIR5002
COR50
PIR5101
PIR5102
COR51
PIR5201
PIR5202
COR52
PIR5301
PIR5302
COR53
PIR5401
PIR5402
COR54
PIR7201PIR7202
COR72
PIR7301PIR7302
COR73
PIR7401
PIR7402
COR74
PIR7501 PIR7502
COR75
PIR7601
PIR7602
COR76
PIR7701 PIR7702
COR77
PIR7801
PIR7802
COR78
PIR7901 PIR7902
COR79
PIR8001
PIR8002
COR80
PIR8101 PIR8102
COR81
PIR8201 PIR8202
COR82
PIR8301
PIR8302
COR83
PIR8401 PIR8402
COR84
PIR8501 PIR8502
COR85
PIR8601 PIR8602
COR86
PIR8701
PIR8702
COR87
PIR8801 PIR8802
COR88
PIR8901 PIR8902
COR89
PIR9001 PIR9002
COR90
PIR9101
PIR9102
COR91
PIR9201 PIR9202
COR92
PIR9301 PIR9302
COR93
PIR9401 PIR9402
COR94
PIR9501
PIR9502
COR95
PIR9601 PIR9602
COR96
PIR9701 PIR9702
COR97
PIR9801 PIR9802
COR98
PIR9901
PIR9902
COR99
PIR10001 PIR10002
COR100
PIR10101 PIR10102
COR101
PIR10201 PIR10202
COR102
PIR10301 PIR10302
COR103
PIR10401 PIR10402
COR104
PIR10501 PIR10502
COR105
PIR10601 PIR10602
COR106
PIR10701 PIR10702
COR107
PITP1201
COTP12
PID290C
PIR8802
PID330C
PIR8402
PID370C
PIR8102
PID410C
PIR7902
PID300C
PIR8701
PID340C
PIR8301
PID380C
PIR8001
PID420C
PIR7801
PID450C
PIR7502
PID430C
PIR7702
PID440C
PIR7601
PID30A PID40A
PID110A
PID120A
PID150A
PID160A
PID170A
PID180A
PID190A
PID200A
PID210A
PID220A
PID230A
PID240A
PID250A
PID260A
PID270A PID280A
PID290A
PID300A
PID310A PID320A
PID330A
PID340A
PID350A PID360A
PID370A
PID380A
PID390A PID400A
PID410A
PID420A
PID430A
PID440A
PID450A
PID460A
PIJ100
PIJ105
PIJ206
PIJ209
PIP600
PIP601
PIP605
PIP702
PIP803
PIP9020
PIP10010
PIP11010
PIP1200
PIP1202
PIP1503
PIP1603
PIQ602
PID220C
PIR7301
PIR9901
PID210C
PIR7201
PIR10002
PIJ102
PIR4102
PIJ103
PIR4202
PIJ2010
PIR4702
PIR4802
PIP603
PIR4402
PIP801
PIR4502
PIP901
PIR10001
PIP902
PIR9601
PIP903
PIR9201
PIP904
PIR8801
PIP905
PIR8401
PIP906
PIR8101
PIP907
PIR7901
PIP908
PIR7701
PIP909
PIR7501
PIP9011
PIR9902
PIP9012
PIR9502
PIP9013
PIR9102
PIP9014
PIR8702
PIP9015
PIR8302
PIP9016
PIR8002
PIP9017
PIR7802
PIP9018
PIR7602
PIP9019
PIR7402
PIP1001
PIR8202
PIP1002
PIR8602
PIP1003
PIR9002
PIP1004
PIR9402
PIP1005
PIR9802
PIP1006
PIR10202
PIP1007
PIR10402
PIP1008
PIR10602
PIP1101
PIR8502
PIP1102
PIR8902
PIP1103
PIR9302
PIP1104
PIR9702
PIP1105
PIR10102
PIP1106
PIR10302
PIP1107
PIR10502
PIP1108
PIR10702
PIP1201
PIR4602
PIP1502
PIP1602
PIQ601
PIR4501
PID460C
PIR7401
PIR4801
PIJ205
PIR5102
PIJ203
PIR5202
PIJ207
PIR5002
PIJ208
PIR4902
PIJ201
PIR5402
PIJ202
PIR5302
PID240C
PIR9501
PID260C
PIR9101
PID230C
PIR9602
PID250C
PIR9202
PID200C
PIR8501
PID190C
PIR8901
PID170C
PIR9301
PID150C
PIR9701
PID180C
PIR8201
PID160C
PIR8601
PID120C
PIR9001
PID110C
PIR9401
PID400C
PIR9801
PID360C
PIR10201
PID320C
PIR10401
PID280C
PIR10601
PID390C
PIR10101
PID350C
PIR10301
PID310C
PIR10501
PID270C
PIR10701
PIP1501
PIP1601
PIQ603
PIR4302
PITP1201
PIP703
PIP704
PIP602
PIP604
PIP1204
PIP1203
PID40C
PIR4101
PID30C
PIR4201
PIJ104
PIJ101
PIJ204
PIR4301
PIR4701
PIR4901
PIR5001
PIR5101 PIR5201 PIR5301 PIR5401
PIR7202
PIR7302
PIP802
PIP9010
PIP1009
PIP1109
PIR4401
PIR4601
PIP701
RM 开发板
Author:Kit.miao
下载后可阅读完整内容,剩余6页未读,立即下载
115 浏览量
117 浏览量
1078 浏览量
146 浏览量
2043 浏览量

taxiu
- 粉丝: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- 实现类似百度的邮箱自动提示功能
- C++基础教程源码剖析与下载指南
- Matlab实现Franck-Condon因子振动重叠积分计算
- MapGIS操作手册:坐标系与地图制作指南
- SpringMVC+MyBatis实现bootstrap风格OA系统源码分享
- Web工程错误页面配置与404页面设计模板详解
- BPMN可视化示例库:展示多种功能使用方法
- 使用JXLS库轻松导出Java对象集合为Excel文件示例教程
- C8051F020单片机编程:全面控制与显示技术应用
- FSCapture 7.0:高效网页截图与编辑工具
- 获取SQL Server 2000 JDBC驱动免分数Jar包
- EZ-USB通用驱动程序源代码学习参考
- Xilinx FPGA与CPLD配置:Verilog源代码教程
- C#使用Spierxls.dll库打印Excel表格技巧
- HDDM:C++库构建与高效数据I/O解决方案
- Android Diary应用开发:使用共享首选项和ViewPager
