低成本NE555寻光机器人:低技术的魅力展现
2 浏览量
更新于2024-09-01
收藏 246KB PDF 举报
在现代科技高度发达的背景下,"低技术"作为一种回归自然和传统的理念,强调利用已有的基本组件创造出实用且富有创新性的解决方案。本文将围绕如何用经典的NE555集成电路制作一款寻光机器人,展示低技术的魅力。
NE555是一款著名的555定时器集成电路,常用于工业控制和简单的电子项目中。在寻光机器人的设计中,它被赋予了智能的角色。通常的寻光机器人设计会利用光电传感器检测周围光线,通过单片机处理这些信号,并驱动电机调整方向。然而,低技术方案则简化了这个过程,仅依赖于NE555和光敏电阻这两个基本元件。
NE555在这里被用作一个双稳态电路,其第二脚和第六脚通过施密特触发器模式工作,形成一个简单却功能强大的光控开关。光敏电阻作为机器人的“眼睛”,感知环境光的变化,其输出电压变化直接影响NE555的状态转换。当两边的光敏电阻检测到的光照强度不同,NE555会驱动两个减速电机按照差速运动原则,使机器人朝光线较强的方向移动。
这个电路设计的经济性显著,一个NE555的成本极低,加上一对光敏电阻,整个电子部分的总成本可能不到1元。虽然从外部看起来,这个机器人结构简单,但从电子学角度看,它实际上是一个微型的模拟计算机系统,光敏电阻作为输入设备,电机作为输出设备,实现了对环境光线的响应和机械动作的控制。
制作寻光机器人时,需要注意物理装配的细节,比如光敏电阻和电机的精确放置,以及电机的极性正确连接,否则可能导致机器人运动方向混乱。表1中可能包含了更详细的电路参数和安装指南,帮助读者理解和实现这一低成本的低技术解决方案。
用NE555制作寻光机器人是一个将基础元件与智能设计相结合的例子,它不仅体现了低技术的实用性,还展示了创新思维在简单硬件上的潜力。这种技术应用既经济实惠,又能激发人们的创新热情,证明了即便在高科技盛行的时代,回归基础也能创造出独特且有价值的成果。
用用NE555制作寻光机器人制作寻光机器人
在日常生活和学习中充斥着高新技术的今天,“低技术”表达的是回归自然和传统,去挖掘人类早已拥有的聪明才
智。低技术不要求我们一味地追求技术的尖端化,但其所展现的科技成果和科学理念同样精彩。本文将通过一
部寻光机器人的制作,向大家展示低技术的魅力。
在日常生活和学习中充斥着高新技术的今天,“低技术”表达的是回归自然和传统,去挖掘人类早已拥有的聪明才智。低技术不
要求我们一味地追求技术的尖端化,但其所展现的科技成果和科学理念同样精彩。本文将通过一部寻光机器人的制作,向大家
展示低技术的魅力。
一、低技术机器人一、低技术机器人
寻光机器人,相信很多机器人爱好者都曾经研究和实际制作过。常见的设计思路是采用一对光电传感器检测环境光,传感器的
输出信号送入单片机I/O口,或者AD口(进行AD变换,视传感器输出信号而定),经过程序算法,电机驱动电路来驱动一对
减速电机或者步进电机做差速运转,带动机器人向着光线强的位置运动。这类解决方案,从机器人电子部分的造价来看,现在
市场上机器人专用光电传感器大概在20元一只;单片机,常见的51、AVR、PIC在5~10元,与之配套的PCB工程板在50元左
右;双电机驱动芯片L293、L298在8元左右;此外还有单片机编程所需的配套软件,下载烧录硬件等。
那么,用低技术的设计思路来制作一个寻光机器人,可以把电路简化到什么程度呢?它的造价又可以做到多低呢?答案是只需
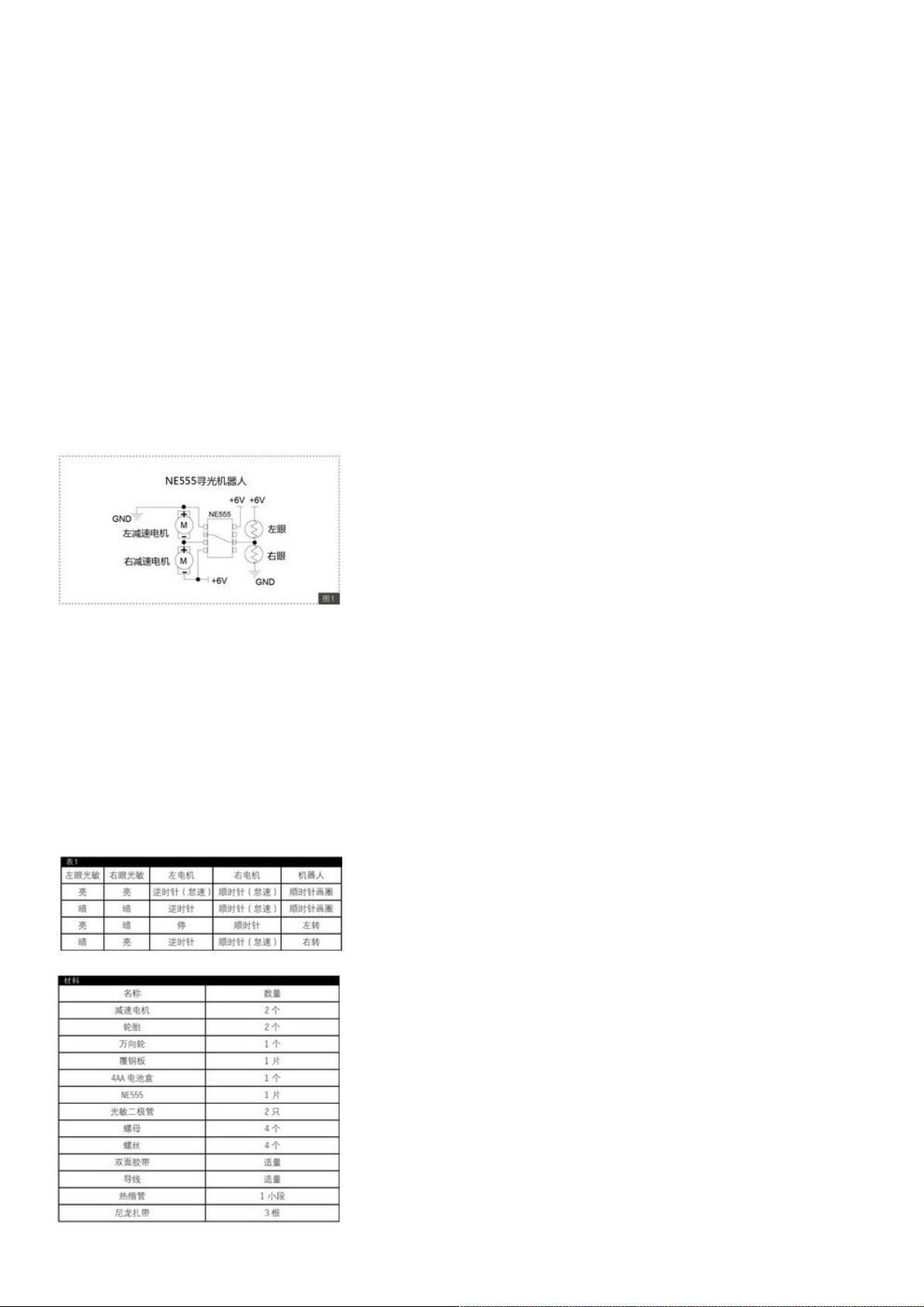
要三个元件:一片NE555和一对光敏电阻。这个低技术机器人的电子部分,造价将小于1元。NE555寻光机器人的线路如图1
所示。它是由GrantM在2001年设计的。
从图1中可以看出,NE555工作在双稳态,第2脚和6脚连接在一起构成施密特触发器模式。光敏电阻构成机器人的虚拟视野,
用来检测机器人前方的环境光。机器人的左眼与右减速电机、右眼与左减速电机,是彼此协同工作的,根据双眼检测到的环境
光线的差异,由NE555驱动两只电机做差速运转,驱动小车向着光线的方向前进。从电路的角度来看,非常简单,但是其实
质上是一部可以移动的模拟计算机,光敏电阻是这部计算机的输入设备,电机是输出设备。注意机器人在物理结构上对两个光
敏电阻和减速电机的安装位置有严格要求,图1中所示的左右方位是从车尾向车头看的,还需要注意两只电机的极性不可接
反,否则会出现机器人运转紊乱的现象。
表1归纳了机器人在不同环境光下的运动特性。,受光敏电阻夹角位置,元件电气对称性,环境光的变化,电机和车体的结构
的影响,实际机器人的运动方式非常复杂。笔者制作的这只机器人,放在中厅会寻着光线自己跑到阳台,在阳光下是做一种不
规则的8字转动;在无光的环境下做顺时针转动。最奇妙的是,因为我使用了高灵敏度快速响应的光敏元件,这部机器人甚至
可以“感觉”到墙壁的反光,对墙壁,衣柜,桌子腿这些浅色高反光物体表现出一种避障特性(靠近墙壁会自己拐弯)。下面是
我制作NE555寻光机器人的过程。
二、制作寻光机器人二、制作寻光机器人
下载后可阅读完整内容,剩余3页未读,立即下载
2020-10-21 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
2024-12-31 上传
LCC-LCC无线充电恒流 恒压闭环移相控制仿真 Simulink仿真模型,LCC-LCC谐振补偿拓扑,闭环移相控制 1. 输入直流电压350V,负载为切电阻,分别为50-60-70Ω,最大功率3.4
2024-12-31 上传
2024-12-31 上传

weixin_38651507
- 粉丝: 1
- 资源: 915
 我的内容管理
展开
我的内容管理
展开







最新资源
- Effective C++ 第2版(中文版).pdf
- verilog+HDL.pdf
- 汇编DEBUG命令使用解析及范例大全
- Instructor’s Solution Manual
- 2010年英语考研大纲词汇
- 华为笔试题含答案 [C]
- 游戏编程之单例类与对象工厂的简单介绍与实现
- ARM嵌入式WINCE实践教程 pdf
- linux系统移植(很详细的移植文档哦) pdf
- 系统托盘Shell_NotifyIcon
- mfc实现系统托盘c++
- VERILOG快速入门
- 《计算机应用基础》习题参考答案.doc
- CC1110中文资料(无线部分)
- ExecutableLinkableFormat.pdf
- 笔记本电脑维修指导手册
