西门子S7-200 PID程序实现与中断子程序示例
需积分: 43 72 浏览量
更新于2024-09-11
4
收藏 347KB DOC 举报
"西门子PID实例展示了如何在西门子S7-200系列PLC中使用PID控制器,通过S7-Micro/WIN软件的指令向导生成PID程序块,并进行参数设置,包括死区、报警和手动功能。完成设定后,自动创建子程序和中断程序,用于主程序或其它程序中实现PID调节。提供的代码示例包括初始化子程序SBR0和由向导生成的PID中断子程序PID0_INTI,以及中断子程序INT0。该程序主要用于通过PLC的模拟输出控制变频器的频率,例如,20mA电流对应50HZ,0mA对应停止。通过调整IN的值,可以改变变频器的运行频率。此外,还包含了模拟量输入的数据采集和校准部分的程序示例。"
西门子S7-200系列PLC的PID控制是工业自动化领域中常见的应用,它是一种自动调节算法,用于使系统输出与期望值保持一致。在这个实例中,PID程序块是通过S7-Micro/WIN的指令向导创建的,这是一个友好的图形界面工具,可以帮助用户方便地配置PID参数。向导提供了对关键参数的设置,如:
1. **死区**:为了减少频繁的微小调整,设置一个死区范围,当输入值在这个范围内变化时,输出保持不变。
2. **报警**:定义输入或输出的极限值,超出这些范围时触发报警。
3. **手动/自动模式**:允许在手动控制(用户直接设定输出)和自动控制(由PID算法控制输出)之间切换。
4. **P(比例)、I(积分)、D(微分)参数**:是PID控制器的核心,它们分别控制响应速度、消除稳态误差和预测未来误差的能力。
在程序中,PID子程序(如PID0_INTI)被调用并在中断事件(如模拟输入值变化)发生时执行。中断子程序(如INT0)则用于处理这些事件。通过这种方式,PLC能够实时响应过程变量的变化并进行相应的输出调整。
初始化子程序SBR0通常用于设置初始条件和配置系统参数。在示例中,可能包含了模拟量输入的配置和校准,确保输入值正确反映现场设备的状态。
模拟量编程部分涉及EM235扩展模块,它提供模拟量输入/输出功能。程序通过读取模拟量输入(如电压信号),经过校准转换成工程单位,然后根据设定的IN值调整输出,控制变频器的频率。
这个实例提供了实践PID控制的基本框架,但实际应用可能需要根据具体系统的特性调整参数,如P、I、D的值,以及适应不同的控制目标和系统响应需求。对于更深入的理解和调试,可以查阅S7-Micro/WIN的官方帮助文档,那里会有详细的解释和指导。
西门子 PID 实例
这是一个西门子 s7-200 PID 程序实例,程序中的 PID 程序块可利用 s7-Micro/win 程序中的“工具”→“指令向导”生成。根据向导的提示可
以对死区、报警、手动等功能进行选择,可以对设定范围、P、I、D 等参数进行设定(完成后还可以利用向导进行更改)。根据提示完
成设定后会自动生成一个子程序和一个中断程序,在主程序或其他程序中调用 PID 子程序就可以实现 PID 调节功能。需要更详细的说明
可以直接察看编程软件的帮助文档,那里说明的还是比较详细的!
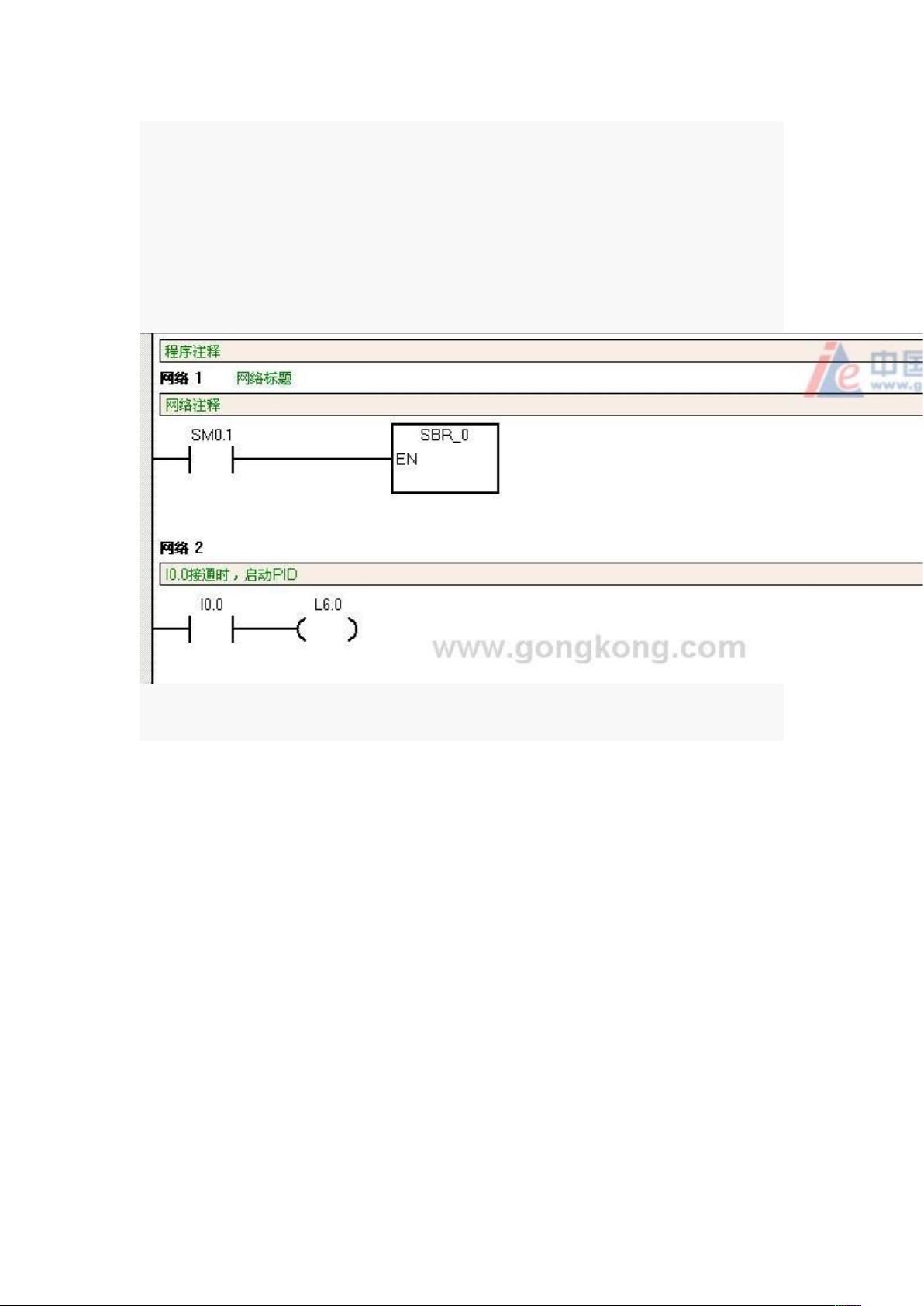
相应的控制主程序为:
初始化子程序 SBR0 为
由程序向导生成 PID 中断子程序 PID0_INTI 为:
下载后可阅读完整内容,剩余6页未读,立即下载
2537 浏览量
1277 浏览量
1420 浏览量
148 浏览量
166 浏览量
2022-03-23 上传

w293558195
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- 久度免费文件代存系统 v1.0:全技术领域源码分享
- 深入解析caseyjpaul.github.io的HTML结构
- HTML5视频播放器的实现与应用
- SSD7练习9完整答案解析
- 迅捷PDF完美转PPT技术:深度识别PDF内容
- 批量截取子网页工具:Python源码分享与使用指南
- Kotlin4You: 探索设计模式与架构概念
- 古典风格茶园茶叶酿制企业网站模板
- 多功能轻量级jquery tab选项卡插件使用教程
- 实现快速增量更新的jar包解决方案
- RabbitMQ消息队列安装及应用实战教程
- 简化操作:一键脚本调用截图工具使用指南
- XSJ流量积算仪控制与数显功能介绍
- Android平台下的AES加密与解密技术应用研究
- Место-响应式单页网站的项目实践
- Android完整聊天客户端演示与实践
