视觉引导技术提升焊接机器人精度:物联网传感器关键技术研究
版权申诉
PDF格式 | 2.28MB |
更新于2024-07-02
| 38 浏览量 | 举报
随着制造业的快速发展,焊接技术正朝着自动化、灵活和智能化的方向演进。作为工业机器人的重要应用之一,焊接机器人在汽车制造等领域得到了广泛应用,特别是在大规模生产和高效率生产中发挥着关键作用。然而,当前的焊接机器人路径和参数设置通常是基于预设的情况,无法根据外部信息的变化进行自我校正,这使得确保焊接强度和精度成为挑战。
本文旨在解决这一问题,将视觉引导技术引入焊接机器人系统。通过视觉传感器实时测量工作台空间位置,并将反馈信息传递给机器人,使机器人能够动态调整姿态,从而实现对焊接过程的精确控制。论文首先分析了国内外焊接技术和视觉引导技术的现状和发展趋势,重点探讨了用于测量的传感器类型及其在实际应用中的性能要求。
研究内容包括传感器的选择,如激光雷达、摄像头或3D相机等,这些传感器需具备高精度、快速响应和环境适应性,以便在各种复杂焊接环境中稳定工作。此外,论文还深入研究了中心线检测算法,这是视觉引导的关键部分,它能从焊接图像中准确提取出焊缝路径,确保机器人沿着预定轨迹进行焊接操作。
中心线提取算法通常采用计算机视觉技术,如模板匹配、边缘检测、深度学习等方法,以实现对图像中焊缝特征的精确识别。这些算法需要经过优化,以提高对光照变化、工件表面不平整度以及焊接烟尘等因素的鲁棒性。
在整个研究过程中,论文不仅关注技术的理论探讨,还会通过实验验证传感器和算法的有效性。实验结果将展示实时引导系统如何提升焊接质量,降低误差,并提高生产效率。这项研究为物联网环境下焊接机器人的智能化和自适应能力提供了创新性的解决方案,对于推动制造业向更高效、精准的方向发展具有重要意义。
第二章 焊接机器人实时引导系统总体方案设计
8
焊枪与视觉传感器完成焊接与测量。
焊接机器人视觉引导系统使用自制的智能视觉传感器实现视觉感官功能。视
觉引导系统通过智能视觉传感器采集法兰边焊接区域的原始图像,并在内部嵌入
式系统中对图像进行处理,计算等,最后获得焊枪与焊接区域相对位置等数据。
得到位置坐标后机器人焊接系统依据视觉系统反馈的数据对机器人位姿进行调
整,完成焊接偏差实时补偿,以实现焊接生产智能化、提高焊缝质量和焊接生产
率。
焊接机器人的柔性视觉测量系统是基于三角法测量原理进行的结构光测量
方法。结构光测量传感器由激光器和相机组成,其原理是首先利用相关标定技术
获得相机坐标系和光平面坐标系的位置关系,将空间物体三维信息转换为二维信
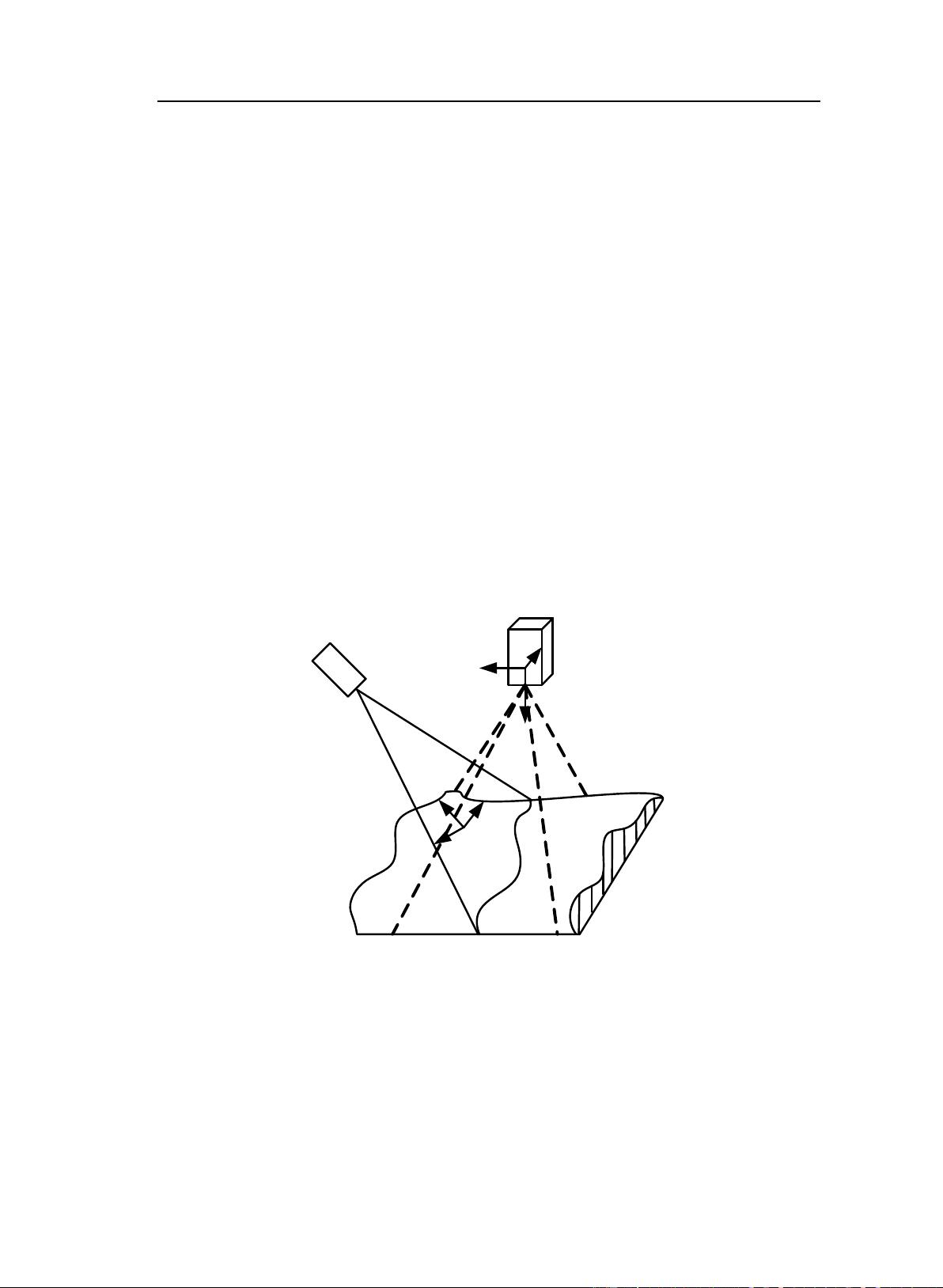
息。其测量的基本原理如图 2-4 所示,首先激光器将一定模式的激光投射到物体
表面(如车身法兰边焊接区域),根据激光模式的不同可以对不同的特征进行测
量,然后利用相机采集这些含有特征的图像,并进行一系列图像处理和数据处理
后,得到特征位置的三维空间坐标
[11]
。
Xc
Yc
Or
Xr
Yr
Zr
Zc
Oc
激光器
(线结构光)
测量传感器
相机坐标系
参考坐标系
被测物
图 2-4 视觉测量理论图
经过视觉测量系统获得焊接区域预焊点在焊枪-传感器坐标系下的三维坐标
后,将其转换为车身坐标系下的三维坐标,与理论上的车身法兰边焊点的坐标进
行误差分析。若预焊点与法兰边两侧极限位置误差范围超过±0.5mm,则反馈到
焊接系统,调整焊枪位姿,对其偏差进行补偿,而后完成焊接任务,实现焊接机
器人的自适应偏差补偿功能。
具体工作过程为:当机器人接到焊接信号后,就按预先设定的焊接路径带动
焊枪和智能视觉传感器运动,使焊枪进入法兰边焊点焊接区域,由智能视觉传感


剩余69页未读,继续阅读
相关推荐



programmh
- 粉丝: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- Web远程教学系统需求分析指南
- 禅道6.2版本发布,优化测试流程,提高安全性
- Netty传输层API中文文档及资源包免费下载
- 超凡搜索:引领搜索领域的创新神器
- JavaWeb租房系统实现与代码参考指南
- 老冀文章编辑工具v1.8:文章编辑的自动化解决方案
- MovieLens 1m数据集深度解析:数据库设计与电影属性
- TypeScript实现tca-flip-coins模拟硬币翻转算法
- Directshow实现多路视频采集与传输技术
- 百度editor实现无限制附件上传功能
- C语言二级上机模拟题与VC6.0完整版
- A*算法解决八数码问题:AI领域的经典案例
- Android版SeetaFace JNI程序实现人脸检测与对齐
- 热交换器效率提升技术手册
- WinCE平台CPU占用率精确测试工具介绍
- JavaScript实现的压缩包子算法解读
