CAN接口电平详解:显性与隐性逻辑及应用
需积分: 47 7 浏览量
更新于2024-09-08
1
收藏 96KB DOCX 举报
CAN接口电平详解是关于CAN通信中至关重要的技术细节。CAN(Controller Area Network)是一种广泛应用于汽车、工业自动化和网络化设备的串行通信协议,以其高效、可靠性和抗干扰性而著称。CAN接口的电平定义是其通信的基础,尽管在CAN规范中并未直接指定具体的电压值代表逻辑电平,而是遵循ISO11898-2标准。
CAN通信的逻辑电平被划分为显性电平(逻辑0)和隐性电平(逻辑1)。显性电平通常表示为两根CAN线(CAN_H和CAN_L)之间的电位差为正值,如CAN_H为3.5V,CAN_L为1.5V,此时总线被认为是逻辑0。相反,隐性电平则是两线电位差为零,即CAN_H和CAN_L均为2.5V,此时代表逻辑1。这种差分电压的设计使得CAN系统能够在噪声环境中仍能保持较高的抗干扰能力。
CAN协议的电平信号设计旨在简化信号处理,避免地线噪声问题,因为它使用的是差分信号。这种设计使得数据传输更加可靠,尤其是在长距离或存在电磁干扰的环境下。相比于传统的RS-232接口,CAN在实时性、适应性和灵活性方面具有明显优势,特别是在需要大量节点互联且距离较远的情况下,通过CAN总线可以实现设备间的高效通信。
物理层是CAN通信的基础,它包括媒体访问单元(MAU)和传输介质。MAU负责信号的发送和接收,确保数据准确无误地在CAN总线上传输。传输介质通常是双绞线或者光缆,根据应用需求选择合适的类型。CAN信号的传输依赖于CAN_H和CAN_L之间的电压变化,这些变化是由CAN控制器通过控制这两个线路上的电压来实现的。
总结来说,理解CAN接口电平对于开发和维护基于CAN的系统至关重要,掌握其电平规则和特性有助于提高系统的稳定性和通信效率。在实际应用中,开发者需要熟知CAN协议的电气特性,确保正确设计和配置硬件电路,以满足CAN通信的要求。
“CAN控制器根据两根线上的电位差来判断总线电平。总线电平分为显性电平和隐性电平,
二者必居其一。发送方通过使总线电平发生变化,将消息发送给接收方。”
二楼:
这里的显性电平和隐性电平是什么意思呢?多谢指教!
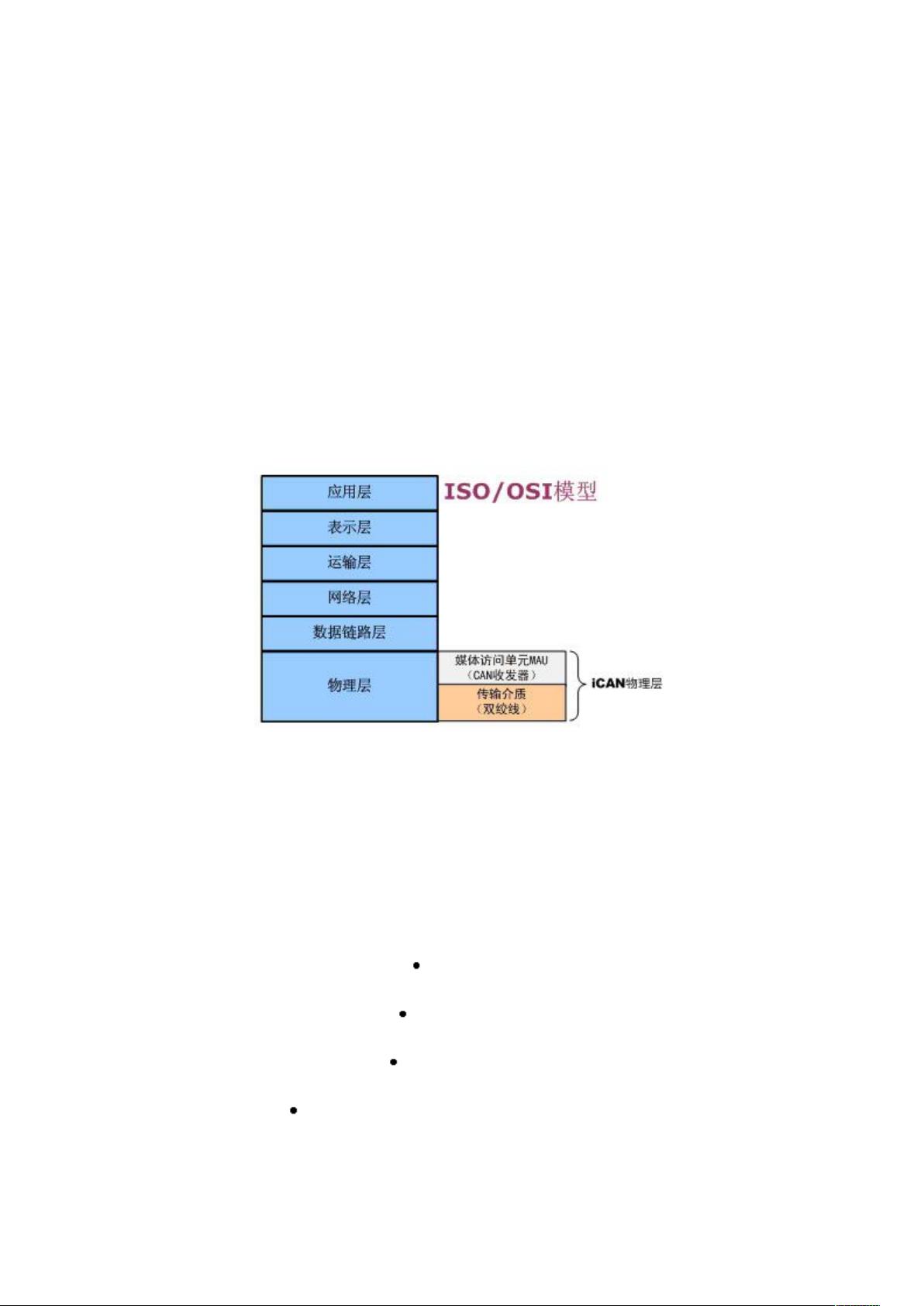
物理层及传输介质
物理层组成部分
iCAN 的物理层包括媒体访问单元和传输介质两部分,在 ISO/OSI 模型中
的位置如下图所示。
传输介质用于传输总线物理信号,媒体访问单元完成 CAN 控制器逻辑电平和
物理信号转换。
物理层和介质特性
iCAN 系统是一个简单l、高效、易用的 FCS 系统,主要应用领域如下:
l使用 CAN 技术
l低成本的传输介质
l总线型网络拓扑结构
lCAN 通信速率 5Kbps~1Mbps,可任意设置
下载后可阅读完整内容,剩余6页未读,立即下载
2011-01-18 上传
点击了解资源详情
点击了解资源详情
2019-09-17 上传
2021-05-19 上传
点击了解资源详情
点击了解资源详情

wagnding198710
- 粉丝: 0
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- ReactMsgBoard:基于React+NodeJs+MongoDB的简易留言板
- psl-er-product
- AIPipeline-2019.9.12.18.55.27-py3-none-any.whl.zip
- groupe5
- 导入:基于sinatra的基于django的迷你框架。 与Django完全兼容
- PopupMaker-Extension-Boilerplate:Popup Maker 扩展开发的基础,旨在为构建扩展提供标准化指南
- WAS:是各种技能的集合
- 空中数据采集与分析-项目开发
- [008]RS232串口通信基本知识与实例.zip上位机开发VC串口学习资料源码下载
- AIJIdevtools-0.5.2-py3-none-any.whl.zip
- 多模式VC++窗体源代码(可以精简显示、隐藏菜单栏等)
- AtherysRogue:基于A'therys宇宙的无赖游戏
- grid-based_framework
- microservices-integrate-system:用于显示部署应用程序过程的系统
- jest-test:开玩笑
- bookclub:虚拟读书会会议应用程序(实验性)
