"STM32智能小车控制系统设计与实现"
版权申诉
基于STM32的智能小车设计是本次试验的研究内容。在该设计中,采用了STM32F103微处理器作为核心芯片,利用PWM技术对速度和舵机转向进行控制。同时,还使用了红外探测电路和超声波避障电路来实现循迹和避障功能。在系统设计过程中,对电机驱动电路、红外探测电路、超声波避障电路等进行了详细的分析和设计。
在该设计中,小车的运动过程中,避障程序优先于循迹程序,采用超声波避障电路进行测距和避障。在超声波模块下,使用舵机来控制超声波的发射方向,同时使用红外探测电路实现小车循迹功能。在硬件设计的基础上,提出了实现电机控制功能、智能小车简单循迹和避障功能的软件设计方案。并在STM32集成开发环境Keil下编写了相应的控制程序,并使用mcuisp软件进行程序下载。
本设计的关键词包括STM32、红外探测、超声波避障、PWM、电机控制等。该设计的核心在于利用STM32微处理器作为控制器,结合传感器和电路设计,实现了智能小车的循迹和避障功能。整个设计过程对嵌入式系统的设计和实现提出了一种全新的思路,对相应领域的研究和实践具有一定的借鉴意义。
在硬件设计方面,该设计以STM32F103为核心,通过PWM技术对速度和舵机转向进行控制,利用红外探测电路实现小车循迹功能,通过超声波避障电路进行障碍物检测并避障功能。在软件设计方面,提出了实现电机控制功能、智能小车简单循迹和避障功能的方案,并在STM32集成开发环境Keil下编写了相应的控制程序。
在整个设计中,采用了微控制器作为核心,充分利用了其强大的功能和灵活性,结合各种传感器和电路设计,实现了智能小车的循迹和避障功能。通过实验验证,整个系统设计稳定可靠,能够满足智能小车的控制需求。
总的来说,基于STM32的智能小车设计是一项涉及到硬件设计和软件编程的复杂系统工程,通过对STM32F103微处理器的合理运用,以及对传感器和电路的精心设计,实现了智能小车的循迹和避障功能。该设计对于嵌入式系统的设计与开发具有一定的借鉴意义,同时也为相关领域的研究提供了一种新的思路和方向。
基于 stm32 的智能小车设计
图 2。4 系统时钟电路图
在时钟电路中,我们选用 8M 的晶振。
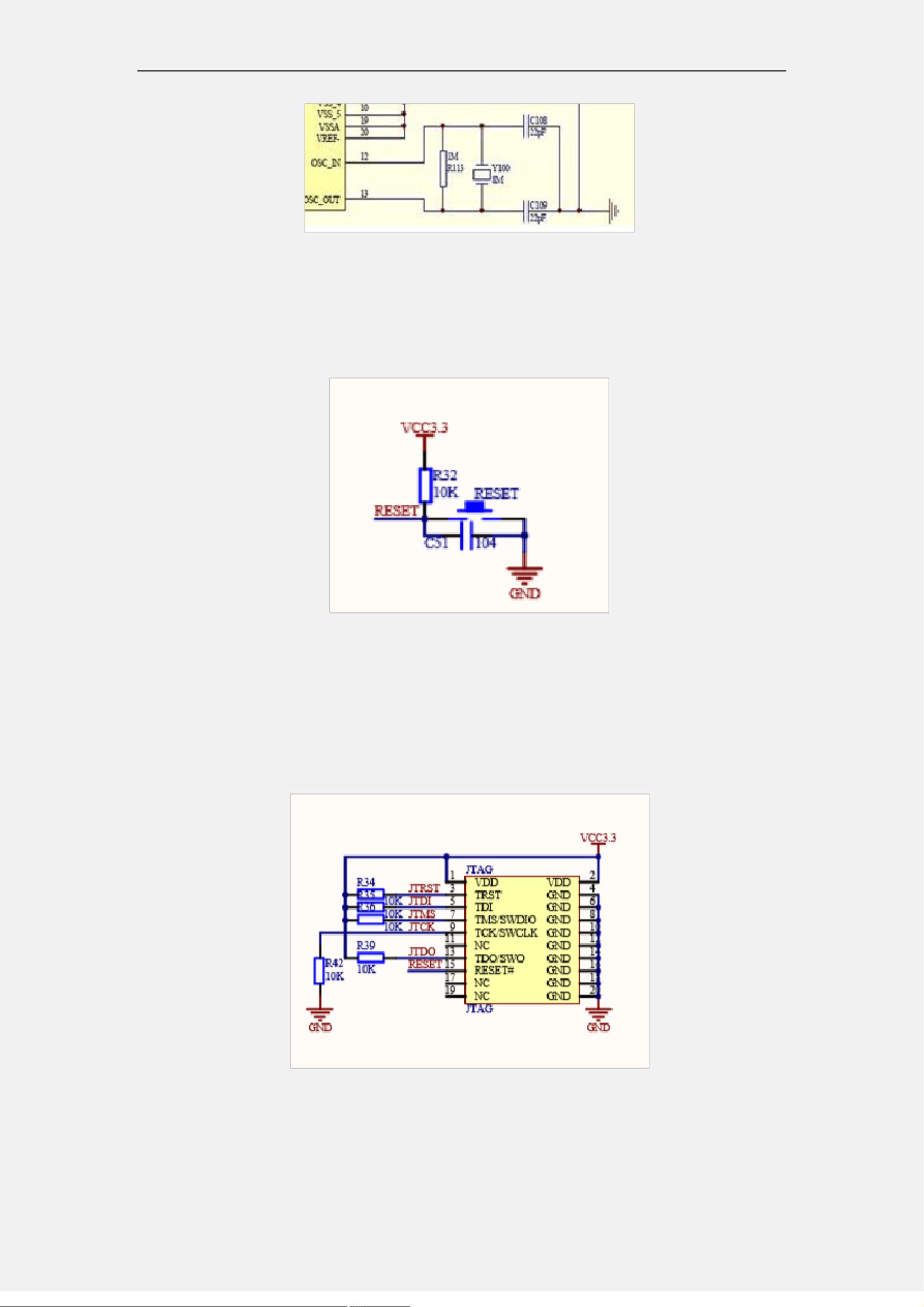
2。复位电路
复位电路的设计如图 2.5 所示:
图 2。5 复位电路图
本次试验所采用的开发板为低电平复位。如图所示,当按键悬空时 RST 输入为
高电平,当按键按下时,RST 脚输入为低电平,从而电路复位.
3.JTAG 电路
JTAG 电路原理图如图 2。6 所示:
图 2。6 JAG 电路原理图
JTAG 的主要功能是使目标文件烧到核处理器中。
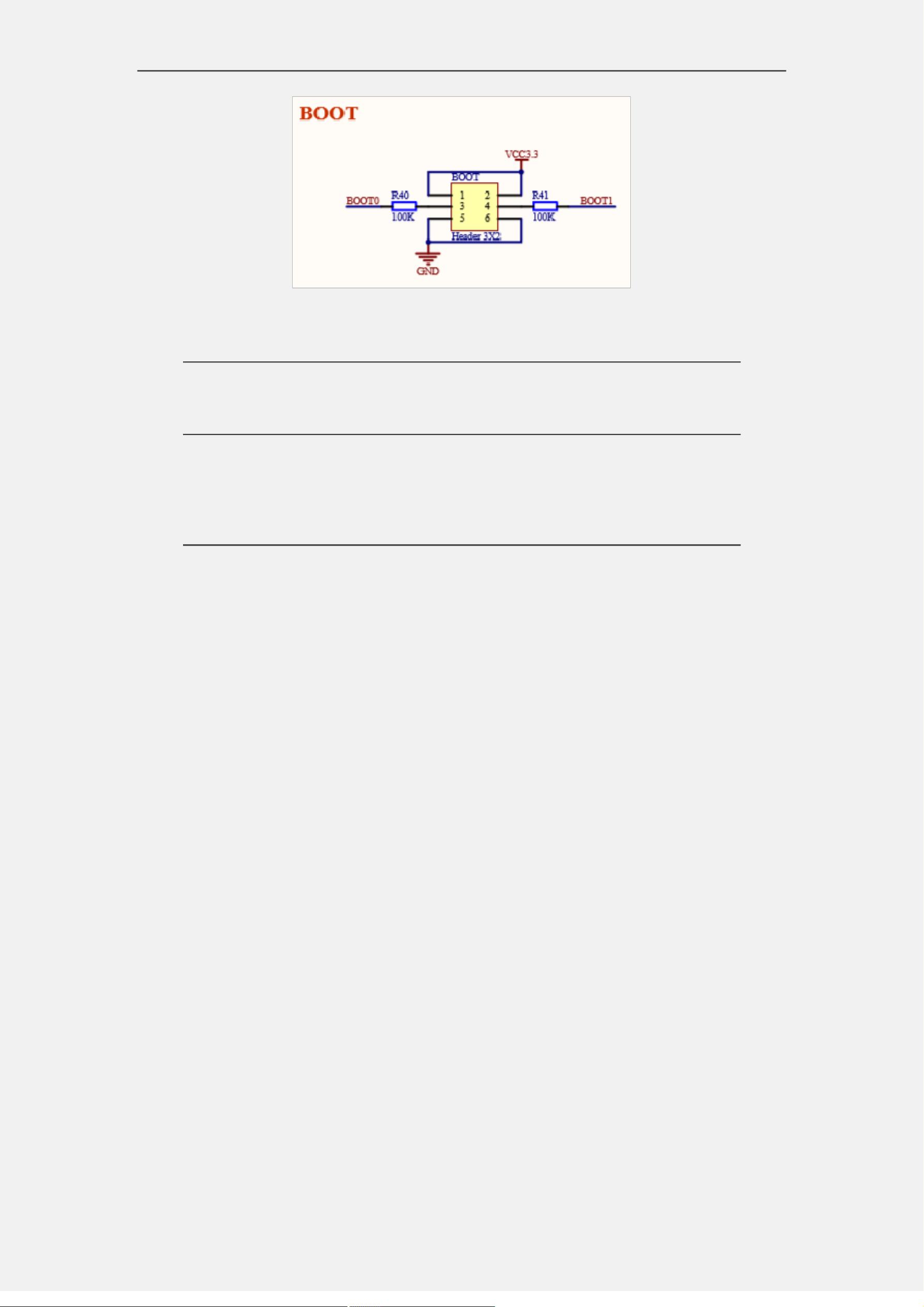
4。启动模式电路
启动模式电路原理图如图 2。7 所示:
- 8 -

剩余45页未读,继续阅读
1374 浏览量
404 浏览量
151 浏览量
291 浏览量
2024-03-11 上传
2022-11-19 上传
529 浏览量
179 浏览量









