Harris角点检测器:一种边缘与角点结合的检测方法
需积分: 9 143 浏览量
更新于2024-09-16
收藏 1.83MB PDF 举报
"这篇资源是关于Harris算子的详细技术介绍,主要探讨了该算子在角点检测和边缘检测中的应用,以及其在3D图像序列理解中的重要性。作者Chris Harris和Mike Stephens在论文中提出了一种基于局部自相关函数的角点和边缘检测方法,该方法在自然图像处理上表现出良好的一致性。"
Harris算子是一种经典且高效的图像特征检测算法,主要用于识别图像中的角点,这些角点通常对应于图像中的显著结构或物体的边界。这种方法的关键在于它能够同时考虑图像局部区域的灰度变化,从而检测出那些引起像素强度显著变化的点。
Harris算子的核心是计算图像的局部二阶矩矩阵,也称为结构张量。这个矩阵包含四个元素,即M = [Ix^2 Iy^2 Ixy; Ixy Iy^2 Ix^2],其中Ix和Iy分别代表图像在x和y方向的梯度。通过计算结构张量的特征值λ1和λ2,可以确定一个点是否为角点。Harris和Stephens提出的角点检测公式是:
R = det(M) - k * (trace(M))^2
其中,det(M)是结构张量的行列式,代表灰度变化的综合信息;trace(M)是结构张量的迹,表示灰度变化的总和;k是一个常数,用于调整检测的灵敏度。当R值大于阈值时,我们认为该点可能是角点。
在实际应用中,为了确保检测到的角点具有稳定性,Harris算子还考虑了相邻像素的响应一致性。对于连续的图像帧,保持角点检测的一致性对于3D视觉理解,特别是通过特征跟踪进行的运动分析至关重要。例如,在自动驾驶、机器人导航或视频监控等场景中,角点检测可以帮助系统识别和跟踪环境中的固定点,从而实现对动态环境的稳定感知。
在论文中,作者展示了Harris算子在处理包含纹理和孤立特征的图像区域时,能够有效地检测角点并保持一致性,这对于理解和解释自然图像(如道路、建筑物、树木等)至关重要。通过从移动相机的单目图像序列中提取和跟踪角点,可以推断出物体的三维结构和运动信息,从而实现对复杂环境的理解。
Harris算子是计算机视觉领域的一个基础工具,它的优点在于能够提供稳定且可靠的特征点,有助于后续的图像匹配、物体识别和跟踪任务。虽然现代图像处理技术已经发展了许多其他角点检测算法,如Shi-Tomasi(Harris算子的简化版)、SIFT、SURF等,但Harris算子仍然因其简单性和有效性而被广泛使用和研究。
A COMBINED CORNER AND EDGE DETECTOR
Chris Harris & Mike Stephens
Plessey Research Roke Manor, United Kingdom
© The Plessey Company pic. 1988
Consistency of image edge filtering is of prime importance
for 3D interpretation of image sequences using feature
tracking algorithms. To cater for image regions containing
texture and isolated features, a combined corner and edge
detector based on the local auto-correlation function is
utilised,
and it is shown to perform with good consistency
on natural imagery.
INTRODUCTION
The problem we are addressing in Alvey Project MMI149
is that of using computer vision to understand the
unconstrained 3D world, in which the viewed scenes will
in general contain too wide a diversity of objects for top-
down recognition techniques to work. For example, we
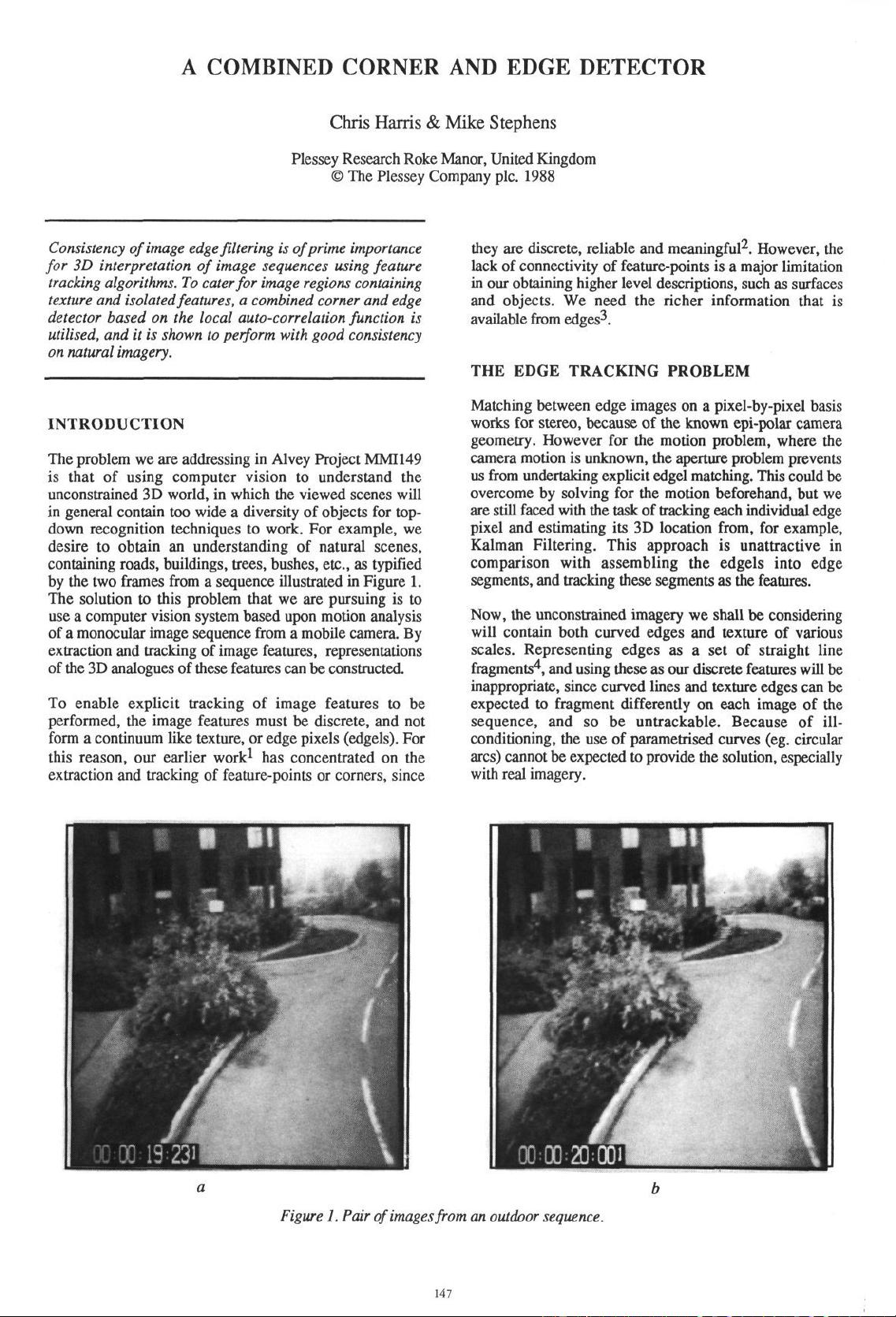
desire to obtain an understanding of natural scenes,
containing roads, buildings, trees, bushes, etc., as typified
by the two frames from a sequence illustrated in Figure 1.
The solution to this problem that we are pursuing is to
use a computer vision system based upon motion analysis
of a monocular image sequence from a mobile camera. By
extraction and tracking of image features, representations
of the 3D analogues of these features can be constructed.
To enable explicit tracking of image features to be
performed, the image features must be discrete, and not
form a continuum like texture, or edge pixels (edgels). For
this reason, our earlier work
1
has concentrated on the
extraction and tracking of feature-points or corners, since
they are discrete, reliable and meaningful^. However, the
lack of connectivity of feature-points is a major limitation
in our obtaining higher level descriptions, such as surfaces
and objects. We need the richer information that is
available from edges
3
.
THE EDGE TRACKING PROBLEM
Matching between edge images on a pixel-by-pixel basis
works for stereo, because of the known epi-polar camera
geometry. However for the motion problem, where the
camera motion is unknown, the aperture problem prevents
us from undertaking explicit edgel matching. This could be
overcome by solving for the motion beforehand, but we
are still faced with the task of tracking each individual edge
pixel and estimating its 3D location from, for example,
Kalman Filtering. This approach is unattractive in
comparison with assembling the edgels into edge
segments, and tracking these segments as the features.
Now, the unconstrained imagery we shall be considering
will contain both curved edges and texture of various
scales. Representing edges as a set of straight line
fragments
4
, and using these as our discrete features will be
inappropriate, since curved lines and texture edges can be
expected to fragment differently on each image of the
sequence, and so be untrackable. Because of ill-
conditioning, the use of parametrised curves (eg. circular
arcs) cannot be expected to provide the solution, especially
with real imagery.
Figure 1. Pair of images from an outdoor sequence.
147
下载后可阅读完整内容,剩余5页未读,立即下载
2009-02-05 上传
2011-04-01 上传
325 浏览量
2011-12-21 上传
2022-09-22 上传
2022-09-24 上传
2010-05-27 上传
2009-03-22 上传

zenglin480168
- 粉丝: 1
- 资源: 8
 我的内容管理
展开
我的内容管理
展开







最新资源
- JHU荣誉单变量微积分课程教案介绍
- Naruto爱好者必备CLI测试应用
- Android应用显示Ignaz-Taschner-Gymnasium取消课程概览
- ASP学生信息档案管理系统毕业设计及完整源码
- Java商城源码解析:酒店管理系统快速开发指南
- 构建可解析文本框:.NET 3.5中实现文本解析与验证
- Java语言打造任天堂红白机模拟器—nes4j解析
- 基于Hadoop和Hive的网络流量分析工具介绍
- Unity实现帝国象棋:从游戏到复刻
- WordPress文档嵌入插件:无需浏览器插件即可上传和显示文档
- Android开源项目精选:优秀项目篇
- 黑色设计商务酷站模板 - 网站构建新选择
- Rollup插件去除JS文件横幅:横扫许可证头
- AngularDart中Hammock服务的使用与REST API集成
- 开源AVR编程器:高效、低成本的微控制器编程解决方案
- Anya Keller 图片组合的开发部署记录
