ABB机器人高级编程:事件程序与多任务
版权申诉
163 浏览量
更新于2024-06-26
收藏 3.7MB PDF 举报
"ABB[a]-J-8ABB机器人高级编程.pdf"
本文主要介绍了ABB机器人的高级编程技术,包括事件程序(EventRoutine)和多任务(MultiTasking)的使用。
8.1 任务目标
该部分的目标是让学习者熟练掌握ABB机器人使用RAPID语言进行高级编程的方法,并熟悉各种RAPID程序指令的应用。
8.2 任务实施
- **事件程序(EventRoutine)**
事件程序是基于RAPID指令编写的例行程序,用于响应特定的系统事件。例如,当系统启动时,可以通过编写EventRoutine来检查IO输入信号的状态。但是需要注意的是,EventRoutine不应包含移动指令和过于复杂的逻辑判断,以防止可能引发的程序死循环,确保系统运行的稳定性。文中以响应系统事件POWER_ON为例,指导如何编写一个打印“StartOK”的rEvent例行程序,以此验证EventRoutine与系统事件的关联。
- **多任务(MultiTasking)**
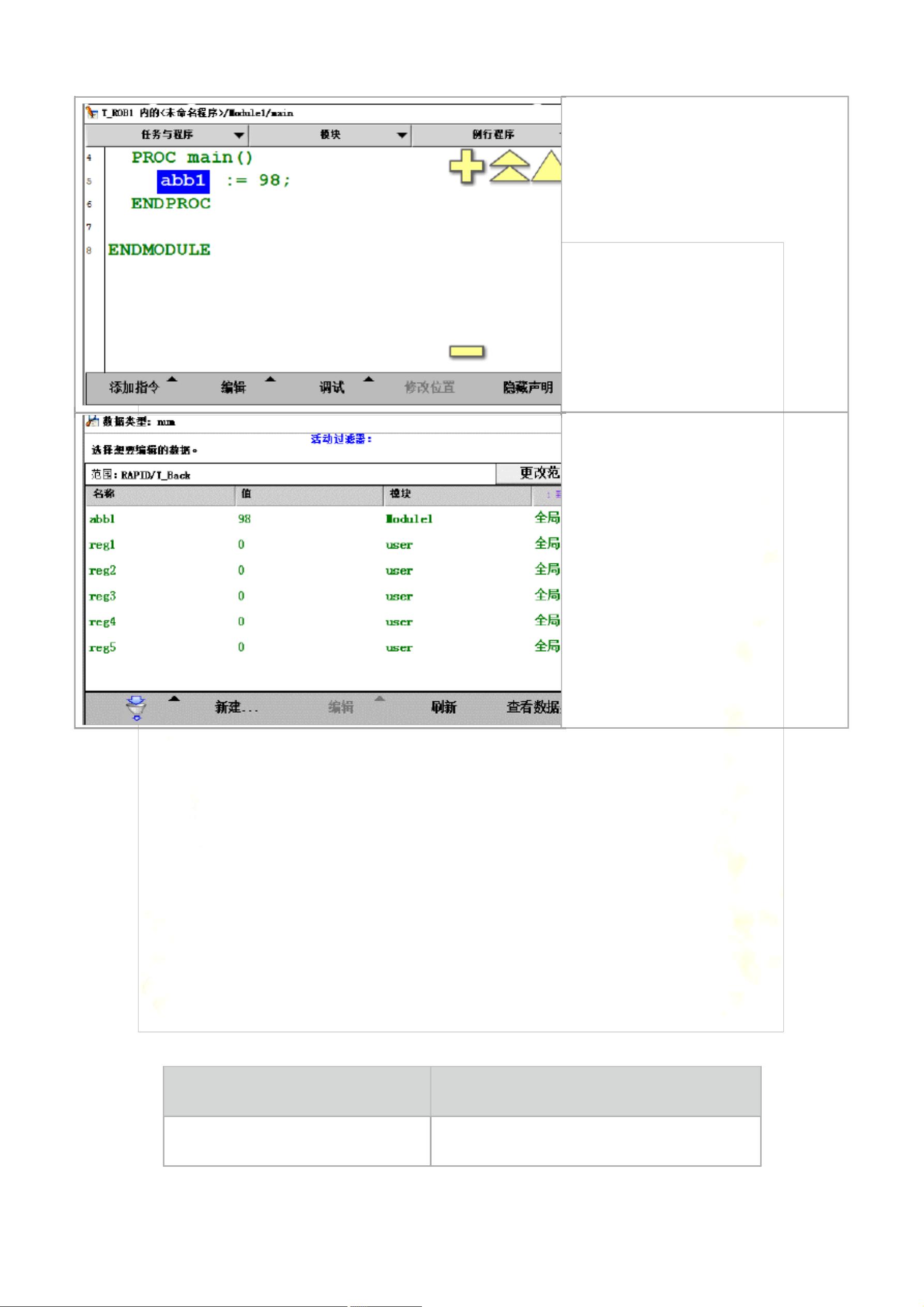
多任务编程允许在前台运行控制机器人运动和逻辑运算的主程序同时,后台并行运行多个附加的RAPID程序。实现这一功能需要系统选项623-1 MultiTasking。最多可以有20个不包含机器人运动指令的后台任务。这些后台任务常用于机器人与PC间的连续通讯或者作为简单的PLC进行逻辑运算。它们在系统启动时即开始运行,独立于机器人当前的工作状态。多任务程序间的数据交换通过共享程序数据实现,不同任务中创建名称相同的可变存储类型变量,修改其中一个任务中的数据,其他任务中的同名变量会自动更新。
1. **建立多任务**
创建多任务的过程涉及多个步骤,包括在控制器配置界面的“Task”选项中添加新的任务,如设置任务名为"T_Back",类型选择"NORMAL",并重命名Mainentry为"mainback",然后重启系统使设置生效。在重启后,通过控制面板取消T_ROB1前台任务,最后在程序编辑器中添加新的程序模块来实现多任务编程。
这篇文档提供了关于ABB机器人如何利用事件程序和多任务特性进行高效、灵活编程的指导,对于想要提升ABB机器人编程技能的工程师来说,是一份宝贵的学习资料。
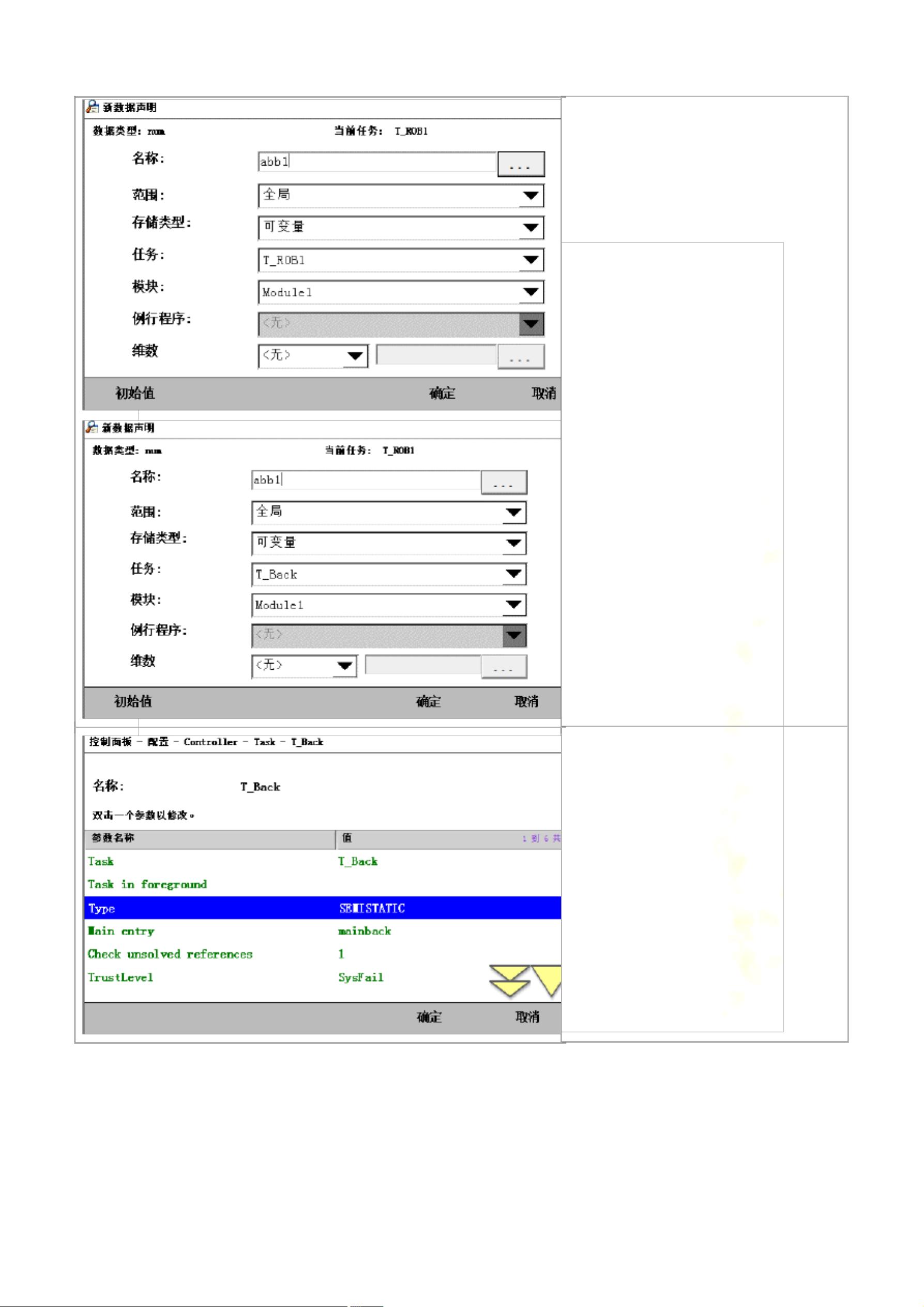
2.在两个任务中建
立两个存储类型
为可变量的名称
相同的 num 类型
数据 abb1。
3.将任务改为后台
运 行
“SEMISTATIC”。
剩余47页未读,继续阅读
2023-03-27 上传
2021-11-27 上传
2022-06-30 上传
2022-06-30 上传
2021-12-11 上传
2022-06-30 上传
2023-05-30 上传

คิดถึง643
- 粉丝: 4020
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Material Design 示例:展示Android材料设计的应用
- 农产品供销服务系统设计与实现
- Java实现两个数字相加的基本代码示例
- Delphi代码生成器:模板引擎与数据库实体类
- 三菱PLC控制四台电机启动程序解析
- SSM+Vue智能停车场管理系统的实现与源码分析
- Java帮助系统代码实现与解析
- 开发台:自由职业者专用的MEAN堆栈客户端管理工具
- SSM+Vue房屋租赁系统开发实战(含源码与教程)
- Java实现最大公约数与最小公倍数算法
- 构建模块化AngularJS应用的四边形工具
- SSM+Vue抗疫医疗销售平台源码教程
- 掌握Spring Expression Language及其应用
- 20页可爱卡通手绘儿童旅游相册PPT模板
- JavaWebWidget框架:简化Web应用开发
- 深入探讨Spring Boot框架与其他组件的集成应用
