MATLAB/SIMULINK仿真永磁同步电机矢量控制研究
本文主要探讨了MATLAB/SIMULINK在永磁同步电机(PMSM)矢量控制系统仿真中的应用,特别是在电动汽车和轮船等交通运输领域的潜在应用。文章首先介绍了矢量控制系统的优越性,如高功率密度、体积小巧、高效率,并强调了无位置传感器控制的重要性,以解决传统有传感器系统存在的问题。
在详细内容部分,文章首先阐述了PMSM的基本理论,包括坐标系转换和数学模型。永磁同步电机在静止的三相(ABC)坐标系下的电压方程以及在d-q旋转坐标系下的电磁转矩方程被列出,这些都是理解电机运行和控制的基础。
接着,文章进入了SIMULINK仿真的核心部分。利用MATLAB/SIMULINK的模块化设计,仿真过程包括速度环调节、电流PI控制器的设定、SVPWM波形生成,以及整个双闭环系统模型的构建。在线调试过程中,通过Scope模块实时监控转子转速、转角、定子电流和转矩,通过调整参数优化系统性能,实现电机的正反转调速和矢量控制。这种方法不仅提高了控制的鲁棒性,还提升了设计效率,缩短了系统开发周期。
1. 速度环调节:这部分涉及的是通过PI控制器来稳定电机的转速,以达到期望的设定值。PI控制器结合比例和积分作用,能有效抑制转速误差,提供良好的动态响应。
2. 电流PI调节:电流控制是保证电机扭矩输出的关键,PI调节器用于保持定子电流的稳定,确保电机运行在理想的电流状态下。
3. SVPWM波形生成:SVPWM是一种高效的PWM技术,它通过优化开关模式来减少谐波,提高电机效率,同时减小开关损耗。
4. 双闭环系统模型:速度环和电流环组成的双闭环控制系统,确保了电机在各种工况下的稳定运行,增强了系统的整体性能。
5. 在线调试与Scope模块:Scope模块提供了实时数据可视化,帮助研究人员快速识别系统性能,及时优化参数。
MATLAB/SIMULINK为永磁同步电机的矢量控制提供了强大的工具,通过仿真实现了高性能的控制策略,对于无位置传感器的PMSM控制系统设计有着重要的理论与实践意义。
MATLAB/SIMULINK的永磁同步电机矢量控制系统仿真研究的永磁同步电机矢量控制系统仿真研究
摘要:永磁同步电机矢量控制系统在电动汽车、轮船等交通运输领域具有广泛的应用前景。使用
MATLAB/SIMULINK的仿真功能,采用模块化的设计结构,分别对速度环调节、电流PI(Proportion
Integration)调节、SVPWM(Space Vector Pulse Width Module)波的产生、、双闭环的整个系统模型进行仿
真研究。仿真在线调试,转子转速和转子转角、定子电流、以及转矩通过Scope模块进行观察,及时调整系统模
型参数,使系统性能达到化,实现了永磁同步电机矢量控制和正反转调速。结果表明该种控制方法具有很好的
鲁棒性,且该种方法可以提高设计的效率并缩短系统设计时间。
摘要:永磁同步电机矢量控制系统在电动汽车、轮船等交通运输领域具有广泛的应用前景。使用 摘要:永磁同步电机矢量控制系统在电动汽车、轮船等交通运输领域具有广泛的应用前景。使用MATLAB/SIMULINK的的
仿真功能,采用模块化的设计结构,分别对速度环调节、电流仿真功能,采用模块化的设计结构,分别对速度环调节、电流PI((Proportion Integration)调节、)调节、SVPWM((Space Vector
Pulse Width Module)波的产生、、双闭环的整个系统模型进行仿真研究。仿真在线调试,转子转速和转子转角、定子电)波的产生、、双闭环的整个系统模型进行仿真研究。仿真在线调试,转子转速和转子转角、定子电
流、以及转矩通过流、以及转矩通过Scope模块进行观察,及时调整系统模型参数,使系统性能达到化,实现了永磁同步电机矢量控制和正反转模块进行观察,及时调整系统模型参数,使系统性能达到化,实现了永磁同步电机矢量控制和正反转
调速。结果表明该种控制方法具有很好的鲁棒性,且该种方法可以提高设计的效率并缩短系统设计时间。调速。结果表明该种控制方法具有很好的鲁棒性,且该种方法可以提高设计的效率并缩短系统设计时间。
1.引言
随着高性能永磁材料、大规模集成电路和电力电子技术的发展,永磁同步电机因为其功率密度高,体积小,功率因数和高
效率而得到发展,且引起了国内外研究学者的关注。传统的控制方式由于引入了位置传感器而给当前的调速系统带来了一系列
的问题:占据了比较大的有效空间,使系统编程复杂。因此无位置传感器控制系统的研究变得越发的重要。
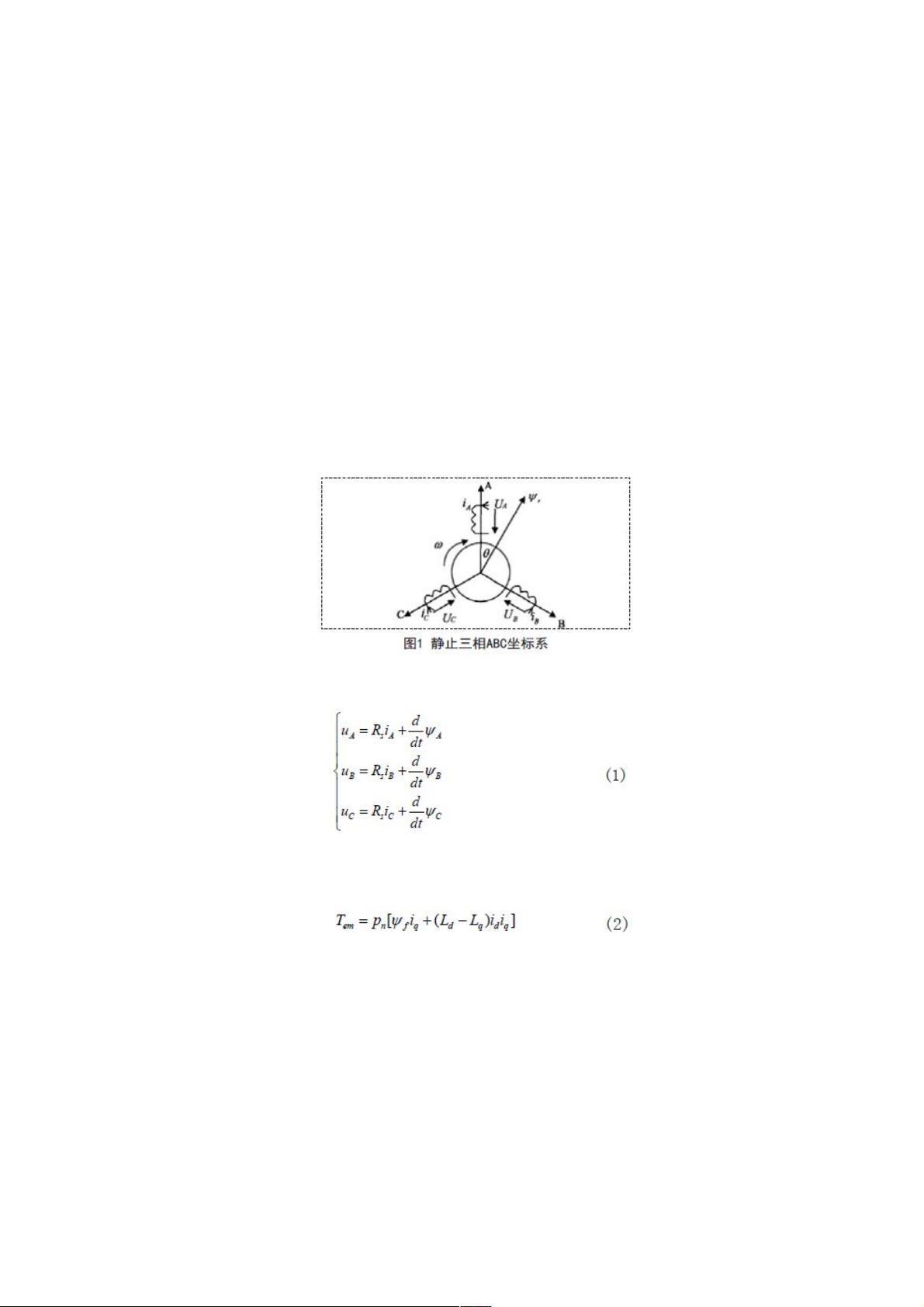
2.PMSM的坐标系和数学模型
永磁同步电机在定子三相(ABC)静止坐标系下的电压方程:
式中,三相绕组的相电压瞬时值分别为A u 、B u 、C u ; A i 、B i 、C i 是相电流的瞬时值; s R 是永磁同步电机定子的
每相绕组电阻; A ψ 、B ψ 、C ψ 是永磁体的磁链在各相绕组的投影。在d-q旋转坐标系下的电磁转矩方程为:
3.SIMULINK仿真
永磁同步电机无传感器矢量控制的系统结构框图,在MATLAB/Simulink下建立PMSM驱动仿真分析,用id=0时的无传感器
矢量控制系统的仿真模型如图2所示,各个模块介绍如下:给定的参考转速是700rpm;速度通过PI调节模块,实现转速的闭环
控制策略,该调节采用了输出限幅;接着是电流PI调节器模块构成电流的闭环控制,输出了定子的电压dq轴分量ud和uq;I-
park逆变器模块将两相旋转直角坐标系(dq)下的值向两相静止坐标系(αβ)下变化,它的输出是αβ轴的定子电压分量参考
值Ualfa,Ubeta;SVPWM和逆变模块用于实现参考电压逆变及其调制,从而可以直接通给电机;PMSM是永磁同步电机模块,
负载转矩是模块Tm.反馈通道模块有:
Clark变换模块:实现三相坐标系(ABC)向两相直接坐标系(αβ)的转换,输出的αβ坐标系下的电流值和电压值作为观
测器的输入,其中SMO模块是反电动势估算模块,SMO1是转速和转角估算模块,这两点是讨论的关键问题所在。
下载后可阅读完整内容,剩余7页未读,立即下载
相关推荐





weixin_38656064
- 粉丝: 10
 我的内容管理
展开
我的内容管理
展开







最新资源
- 微信订单提醒与收款提示音MP3下载
- Linux邮件系统项目资料深入解析
- 深入理解Intel® 64与IA-32架构开发者手册
- 基于STM32的自行车自动刹车灯电路设计与应用
- 震旦ad166打印机官方驱动下载体验
- 建筑涂料喷刷机器人:创新设备提升工作效率
- Android业务时间选择器库使用教程
- 掌握PLSQL Developer:Oracle数据库开发利器
- 创新建筑模板制备技术公布
- VB.NET源码实现屏幕花瓣飘飞效果转换为C#
- sqlhc监控工具:生成数据库方案的利器
- 多功能GPS卫星接收与时间显示电路方案设计
- 回归基础精讲:线性与非线性变量分析
- 通用webService客户端测试工具发布
- AmniXTension: Kotlin扩展工具库简化开发者生活
- 建筑阳台排水汇集器:技术创新与应用
