揭秘四旋翼无人机飞行原理:牛顿定律与伯努利定律的应用
需积分: 2 84 浏览量
更新于2024-08-03
3
收藏 2.09MB DOC 举报
四旋翼无人机飞行原理深入解析(一)
在无人机的世界中,四旋翼无人机的独特飞行方式依赖于精密的飞控系统和基本的物理法则。首先,让我们聚焦于飞控系统,它是无人机的核心组件,扮演着“大脑”的角色。飞控系统确保无人机的稳定性,通过精确地计算和调整四个旋翼的转速,维持飞行姿态。它必须具备实时性,能够处理来自传感器的数据,如陀螺仪、加速度计和高度计,来确保飞行的精度和控制响应。此外,数据链系统是连接地面控制站与无人机的关键纽带,它确保无线通信的可靠性和信息的及时反馈,使得远程操作者能够有效地指挥无人机执行任务。
牛顿三大运动定律在四旋翼无人机飞行中起着关键作用:
1. 牛顿第一定律,也称惯性定律,指出无人机只有在受到平衡的外力时才会保持静止或匀速直线运动。当飞机在空中匀速飞行时,升力(由旋翼产生的)与重力相互抵消,合力为零。降落时,虽然速度减小,但只要升力依然大于重力,飞机就不会加速下坠。
2. 牛顿第二定律阐述了力与加速度的关系,即F=ma。无人机起飞时,发动机提供的推力大于空气阻力,产生加速度使飞机加速上升。随着速度增大,阻力也随之增加,当推力等于阻力时,加速度为零,飞机达到稳定飞行状态。
3. 作用力与反作用力的牛顿第三定律在四旋翼无人机中表现为旋翼旋转时对电机施加反扭矩。为了抵消这种反作用力并保持直升机的稳定性,现代直升机通常配备尾桨或水平尾翼来平衡。
伯努利定律是理解飞行原理的另一个重要因素。根据这一定律,流体(如空气)在流速增大的地方压强减小,流速减小的地方压强大。在设计机翼时,通过使上表面空气流速加快、压强减小,与下表面的较大压强形成压力差,从而产生升力,推动飞机升空。
四旋翼无人机飞行的实现离不开精确的控制系统、力学原理的应用以及空气动力学中的伯努利定律。每个组件和定律都不可或缺,共同保证了无人机能够在复杂环境中稳定飞行并执行任务。
无人机主要包括飞机机体、飞控系统、数据链系统、发射回收系统、电源系统等。
飞控系统又称为飞行管理与控制系统,相当于无人机系统的“心脏”部分,也就是
无人机的核心部件,对无人机的稳定性、数据传输的可靠性、精确度、实时性等
都有重要影响,对其飞行性能起决定性的作用;数据链系统可以保证对遥控指令
的准确传输,以及无人机接收、发送信息的实时性和可靠性,以保证信息反馈的
及时有效性和顺利、准确的完成任务;发射回收系统保证无人机顺利升空以达到
安全的高度和速度飞行,并在执行完任务后从天空安全回落到地面。
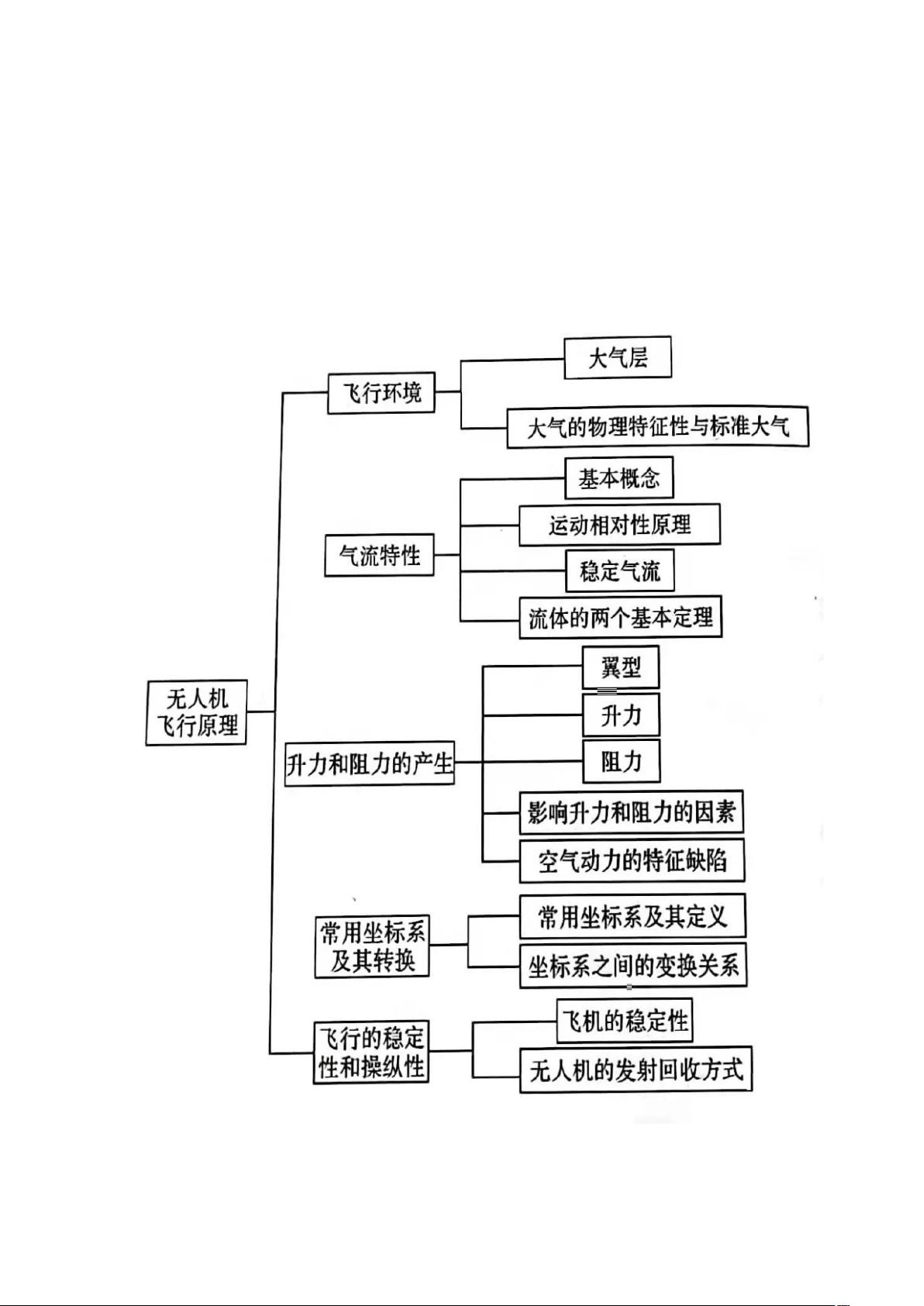
无人机为什么可以飞翔在空中呢?其中不仅包含着无人机的飞行结构和飞行
环境的影响,更包含了无人机本身的飞行原理。
牛顿三大运动定律
下载后可阅读完整内容,剩余4页未读,立即下载
416 浏览量
4578 浏览量
216 浏览量
670 浏览量
234 浏览量
605 浏览量
416 浏览量
2022-11-06 上传
498 浏览量

OpenNewRoute
- 粉丝: 182
 我的内容管理
展开
我的内容管理
展开







最新资源
- Openaea:Unity下开源fanmad-aea游戏开发
- Eclipse中实用的Maven3插件指南
- 批量查询软件发布:轻松掌握搜索引擎下拉关键词
- 《C#技术内幕》源代码解析与学习指南
- Carmon广义切比雪夫滤波器综合与耦合矩阵分析
- C++在MFC框架下实时采集Kinect深度及彩色图像
- 代码研究员的Markdown阅读笔记解析
- 基于TCP/UDP的数据采集与端口监听系统
- 探索CDirDialog:高效的文件路径选择对话框
- PIC24单片机开发全攻略:原理与编程指南
- 实现文字焦点切换特效与滤镜滚动效果的JavaScript代码
- Flask API入门教程:快速设置与运行
- Matlab实现的说话人识别和确认系统
- 全面操作OpenFlight格式的API安装指南
- 基于C++的书店管理系统课程设计与源码解析
- Apache Tomcat 7.0.42版本压缩包发布
