NACHI那智OTC接口面板操作与设计指南
需积分: 31 56 浏览量
更新于2024-07-14
收藏 1.47MB PDF 举报
"NACHI那智OTC的接口面板功能介绍及使用操作说明书,涵盖了从设计到执行的全过程,适用于经过相应培训的人员对那智机器人的操作、维护。"
那智OTC的机器人接口面板是其控制系统的重要组成部分,主要用于机器人操作与监控。这份文档详细阐述了接口面板的功能和使用方法,确保用户在安全的前提下有效利用机器人。
在第一章"概要"中,主要介绍了接口面板功能的概要,包括面板的基本结构、规格以及输入输出信号的类型。1.1.1部分简述了接口面板的整体功能,1.1.2部分则列出了面板的具体技术规格,1.1.3部分详细说明了不同类型的输入输出信号及其作用,这些信号用于机器人与外界设备的通信。
第二章"使用条件的设定"指导用户如何根据工作需求定制面板的显示和操作。2.1.1章节说明如何设定显示或隐藏特定画面,2.1.2则涉及通过输入信号触发特定画面显示的方法。2.1.3至2.1.9分别讨论了设置初始状态、无功能编码开关命名、信号重复检查、F键触摸屏操作、输入信号控制共同开关、确认共同开关状态以及将软键输出信号用作通用信号等功能。
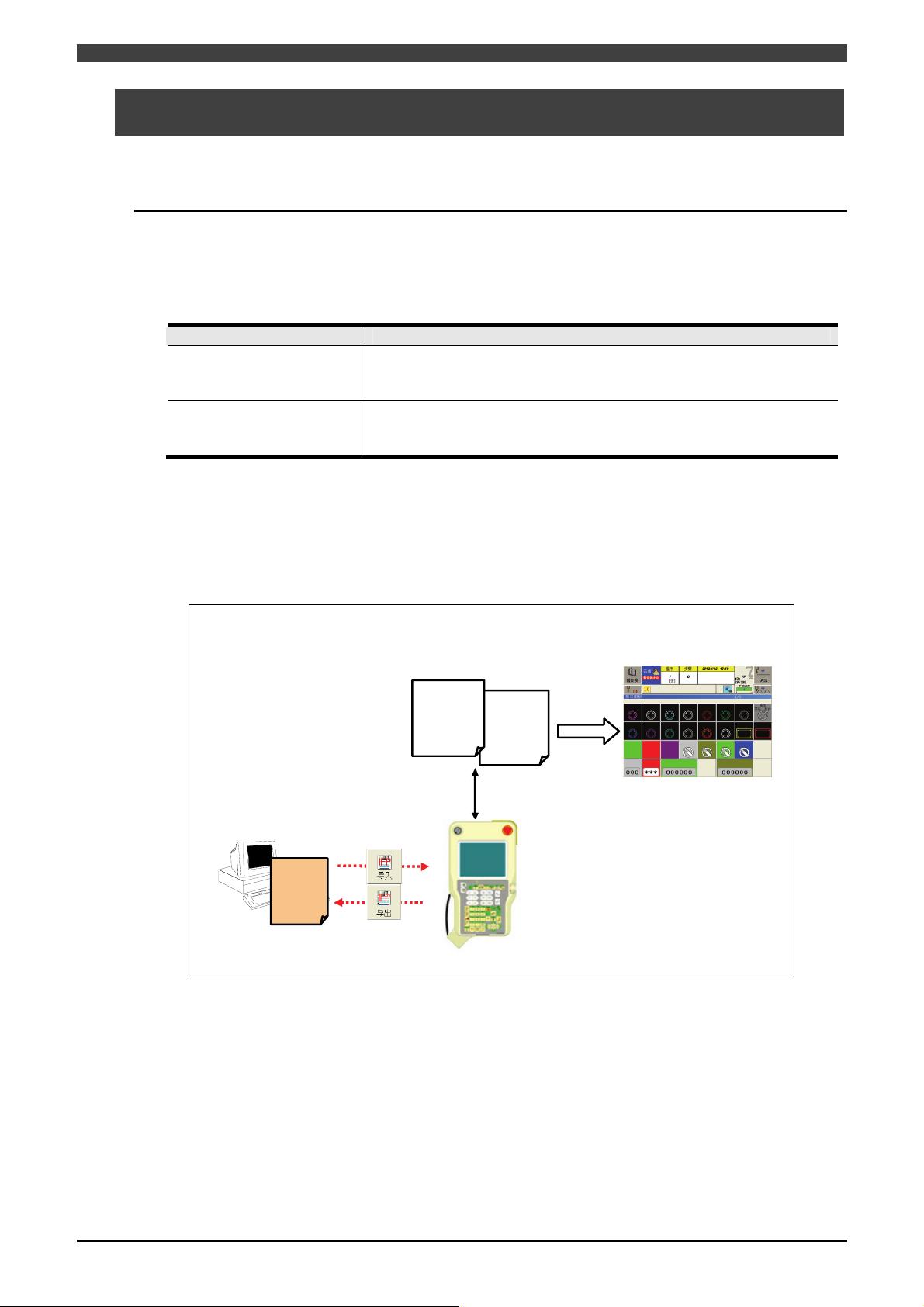
第三章"画面设计"详细讲解了创建和配置用户界面的过程。3.1介绍了画面的基本布局,包括画面的数量和操作开关的位置。3.2部分深入探讨了各种操作开关的设计,如圆形和方形指示灯、按钮开关、光照式按钮开关、ON/OFF选择开关、2接点选择开关、显示屏幕和数字开关(用于数据输入)。此外,3.3章节介绍了如何使用外部个人计算机进行更复杂的编辑,包括画面的导入和导出。
第四章"接口面板的执行"提供了实际操作指南,4.1.1部分说明如何打开和翻页接口面板,4.1.2部分则阐述了操作开关的正确使用方式,这些都是确保机器人正常运行的关键步骤。
这份资料旨在帮助用户熟练掌握那智OTC机器人的接口面板功能,确保在遵守安全规定的同时,实现高效、精准的自动化作业。对于操作人员来说,深入理解和应用这些知识对于提高生产效率和保障工作安全至关重要。
1.1 接口面板功能的概要
1-2
项目 规格
标题 全角 16 个字符、半角 32 个字符以内
颜色 亮灯颜色、关灯颜色或从 16 个颜色中选择基座颜色
编辑方法 通过悬式示教作业操纵按钮台登录
或在个人计算机上使用商业文本编辑器可以进行编辑
显示方法 通过专用键进行显示 On/off 触摸操作
或通过输入信号显示
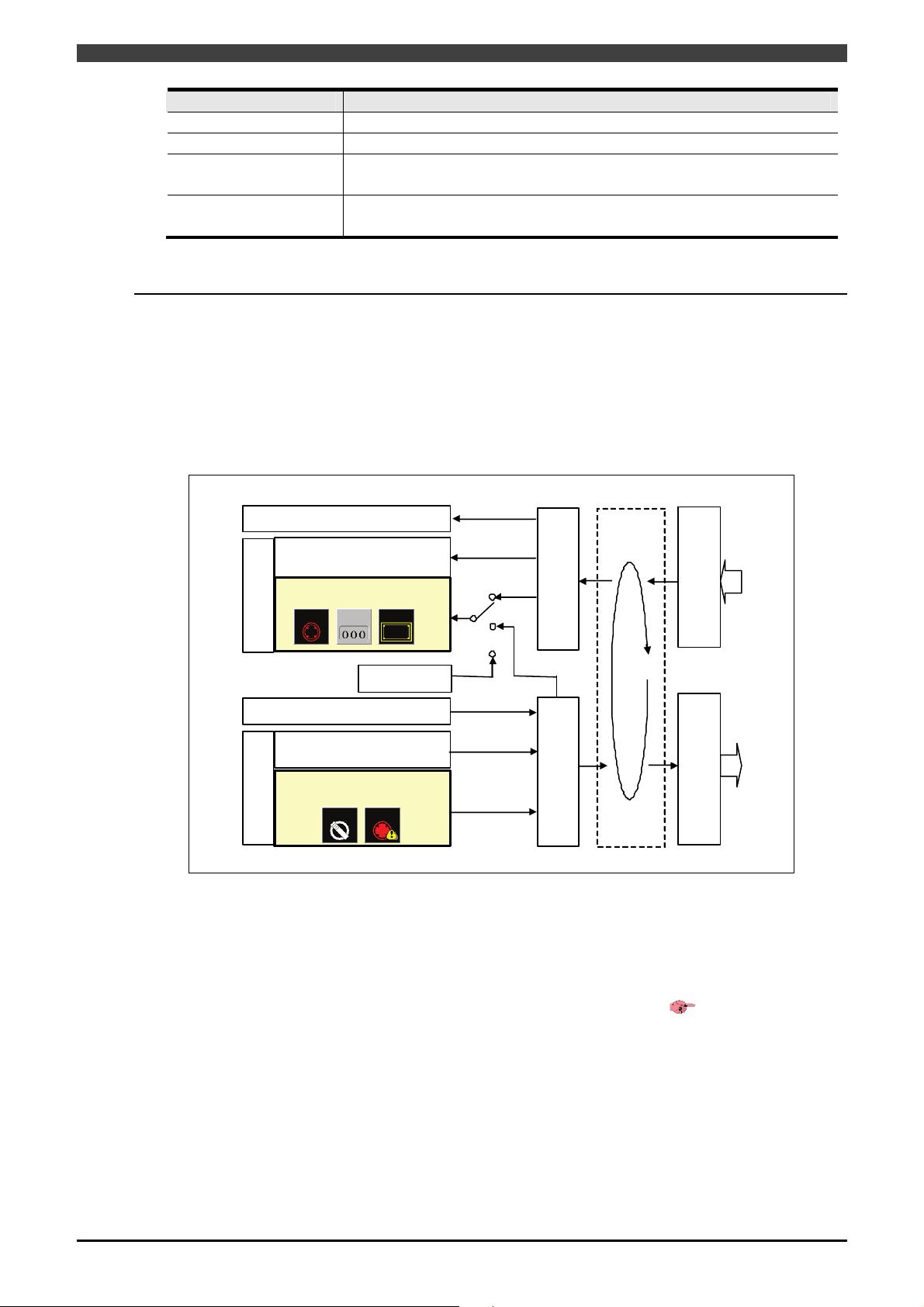
1.1.3 输入输出信号
图 1.1.2 接口面板的输入输出信号概念图中描述了接口面板功能的输入输出信号概念。
通过 IF 面板输出,即通过操作按钮或选择开关等输出的信号,与启动中或伺服 ON 中的状态输出信号相同,
分配逻辑输出信号后使用。
通过 IF 面板输入,即指示灯或显示器等用于显示的输入信号,虽然与启动中或伺服 ON 中的状态输入信号相
同,分配逻辑输入信号后使用,还可以显示逻辑输出信号和内部控制变量。(不仅可以显示来自外部的输入信号,
也可以显示本控制装置自身的输出信号。)
I/F
I/F
ON
ON
2048
PLC
2048
2048
2048
图 1.1.2 接口面板的输入输出信号概念
通过 IF 面板输出,即通过操作按钮和选择开关等,无法直接操作逻辑输入信号。(无法从接口面板执行启动
指令和伺服 ON 指令。)
但如图所示,使用了软件 PLC 时,就没有上述限制,可以自由连接 IF 面板的输入输出和输入输出信号。
已分配的输出信号无法设定为 IF 面板的输出信号。反之,IF 面板已设定的输出信号将无法作为不同功能的输
出信号分配。
另外,显示用的信号通过其他功能可以重复使用已使用的输入输出信号。(参考
“2.1.5 设定信号的重
复检查”)
剩余45页未读,继续阅读
2021-03-30 上传
2021-03-30 上传
2020-08-18 上传
2021-03-30 上传
2021-03-30 上传
2020-07-27 上传

艺多压身
- 粉丝: 2
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- prlx93.github.io:我的投资组合
- Python库 | jesse-0.9.1-py3-none-any.whl
- JavaScript基于人脸识别的宿舍出入统计微信小程序源码.zip
- Neo4j资源:Neo4j.rb的性能测试相关程序
- Real-Change:街头报纸Real Change的映射引擎
- springboot076基于web的智慧社区设计与实现_rar.zip
- protobuf.cr:Protobuf 生成器、编码器和解码器
- 2 MATLAB进阶_matlab_
- cn-id-card-validator:用于中国身份证验证的js验证库(包括15和18卡长度)
- rM2PDF:用于可标记阅读器的rM2PDF脚本
- furima-34573
- Python库 | jesse-0.30.1-py3-none-any.whl
- micropython-camera-driver:向MicroPython添加相机支持
- snakeyaml-1.30.zip
- 车市.rar_图形图像处理_C/C++__图形图像处理_C/C++_
- mailqparser:用于postfix邮件队列的便捷解析器
