CMT2300A FIFO与包格式工作原理及中断系统解析
需积分: 18 40 浏览量
更新于2024-07-09
收藏 1.93MB PDF 举报
"CMT2300A FIFO和包格式使用指南.pdf"
本文档是CMT2300A FIFO(先进先出)和包格式的使用指南,旨在详细阐述该器件的FIFO工作原理、包格式以及中断系统的工作方式。在介绍配置寄存器内容时,会关联到RFPDK平台上可输入的参数,以便用户进行配置。文档涵盖了以下部分编号的CMT2300A:
- 部件编号:CMT2300A
- 频率范围:127-1020MHz
- 调制方式:(G)FSK/OOK
- 功能:收发器
- 配置:寄存器
- 封装:QFN16
在阅读本文档之前,建议先阅读《AN142-CMT2300A快速入门指南》以更好地理解CMT2300A的基本操作。
文档的主要内容包括:
1. FIFO工作原理:
- FIFO相关的寄存器:这部分将详细解释与FIFO操作相关的硬件寄存器,这些寄存器用于控制数据的读写和状态查询。
- FIFO工作模式:介绍FIFO的不同工作模式,如空闲模式、接收模式和发送模式,以及如何在不同场景下切换这些模式。
2. FIFO中断时机:
- FIFO在接收和发送过程中如何触发中断,以及中断处理的时序,这对于实时处理数据传输至关重要。
3. FIFO应用场景:
- 应用场景1:接收数据在RX端:描述如何在接收数据时利用FIFO来存储并处理接收到的数据。
- 应用场景2:预先填充数据进入TX发射:说明如何在数据传输前预先装载FIFO,以确保连续无间断的传输。
在这些应用场景中,用户将了解到如何设置和管理FIFO,以实现高效、可靠的无线通信。通过理解FIFO的工作机制和中断系统,开发者能够优化CMT2300A的性能,确保数据的正确传输和处理。
这份指南对于那些需要利用CMT2300A进行无线通信设计的工程师来说是一份非常实用的参考资料,它提供了深入的技术细节和实际应用示例,有助于用户充分利用CMT2300A的FIFO功能和包格式特性。
AN143
Rev 0.9 | Page 7/40
www.cmostek.com
Cmt2300_GoStby();
Cmt2300_ClearInterruptFlags();
/* Must clear FIFO after enable SPI to read or write the FIFO */
Cmt2300_EnableWriteFifo();
Cmt2300_ClearFifo();
// When merged FIFO is used, additional delay is required when the sending byte is too long.
/* The length need be smaller than 32 */
Cmt2300_WriteFifo(g_pTxBuffer, g_nTxLength);
FIFO read-write operation code examples see Appendix 1.
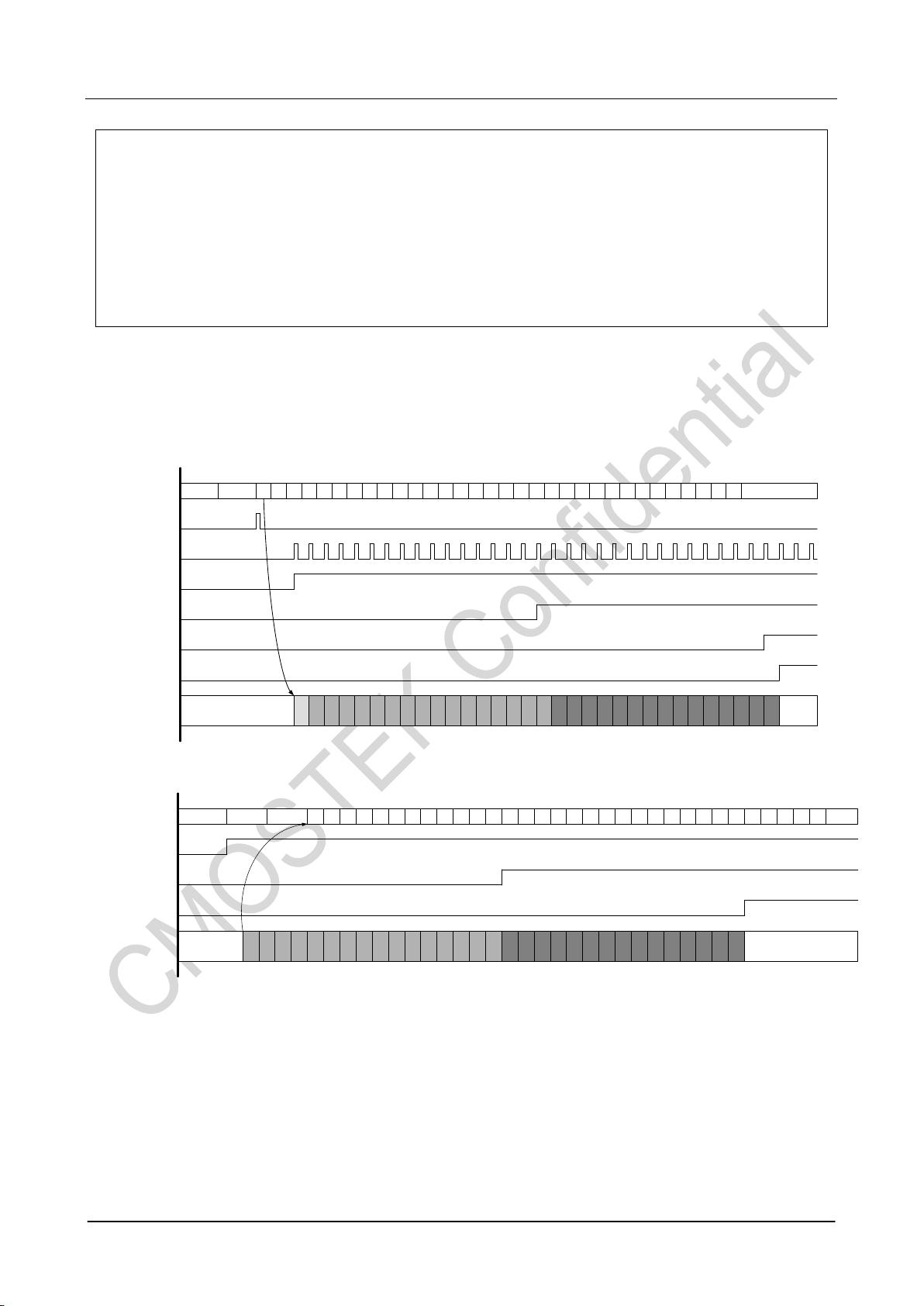
1.3 FIFO Interrupt Timing
Here, we first give the interrupt timing diagram of RX FIFO and TX FIFO. Users can refer to them to
understand easily.
Figure2. CMT2300A RX FIFO Interrupt Timing Diagram
Figure3. CMT2300A TX FIFO Interrupt Timing Diagram
1.4 FIFO Application Scenes
When the FIFO is configured, you can start using it. Here are some classic application scenes. To
complete the entire process of TX and RX, you also need to configure and control other things. These are
introduced later. Here we will only introduce the contents related to FIFO.
10 32 54 76 98 1110 1312 1514 1716 1918 2120 2322 2524 2726 2928 3130EMPTY FULL
RX_FIFO_NMTY
RX_FIFO_TH
RX_FIFO_FULL
Sync 10 32 54 76 98 1110 1312 1514 1716 1918 2120 2322 2524 2726 2928 3130RX DATA Noise Noise
SYNC_OK
RX FIFO ARRAY
RX_FIFO_OVF
(FIFO_TH = 16)
RX_FIFO_WBYTE
10 32 54 76 98 1110 1312 1514 1716 1918 2120 2322 2524 2726 2928 3130EMPTY FULL
TX_FIFO_NMTY
TX_FIFO_TH
TX_FIFO_FULL
Sync 10 32 54 76 98 1110 1312 1514 1716 1918 2120 2322 2524 2726 2928 3130TX DATA Prefix 0
FIFO ARRAY
(FIFO_TH = 16)
Pream

剩余39页未读,继续阅读
2017-05-19 上传
2020-09-30 上传
2018-10-17 上传
2021-09-15 上传
2021-09-15 上传
2022-09-21 上传
2021-09-15 上传
2021-09-15 上传
2020-03-25 上传

11233333
- 粉丝: 0
- 资源: 91
 我的内容管理
展开
我的内容管理
展开







最新资源
- toy-flow:用于重现流程类型问题的回购
- XmlRpc C++ for Windows-开源
- Electric Vacherie' optimization using non-linear programmin :此代码使用 NLP 优化电动汽车站的充电顺序-matlab开发
- Camera2全屏不拉伸展示的资源
- 基于Android的瀑布流实现,类似于蘑菇街和迷尚 应用里的排列.zip
- AccessControl-5.7-cp310-cp310-win_amd64.whl.zip
- 高斯模糊的图像效果
- java代码-实训5,题2
- Flight-Simulator:CS418 UIUC秋季2015
- JS实现表单输入正则表达式验证功能源码.zip
- despline:“despline/offset” x 轴和 y 轴,灵感来自 Anne Urai 的“offsetAxes”,但考虑到对数比例-matlab开发
- dum:根据它们的运行时表示来打印OCaml值
- AccessControl-6.1-cp38-manylinux_i686.whl.zip
- 银联POS刷卡机3D模型
- Python库 | dask_cuda-21.10.0a210724-py3-none-any.whl
- 基于C语言实现学生成绩管理系统(含源代码+使用说明).rar
