ABB机器人编程指令全解析:调用、控制与变量操作
"ABB机器人编程指令详解,涵盖了程序调用、逻辑控制、停止程序执行、变量指令、等待指令、程序注释、程序模块加载、变量功能以及转换功能等多个方面,旨在帮助用户深入理解和应用ABB机器人的编程指令。"
在ABB机器人编程中,指令的掌握至关重要。以下是各部分指令的详细解释:
1. **程序调用**
- `ProcCall` 用于调用已定义的例行程序,使得程序结构更加模块化。
- `CallByVar` 允许使用变量来动态调用例行程序,增加了程序的灵活性。
- `RETURN` 用于结束子程序或例行程序的执行,返回到调用它的程序。
2. **例行程序内的逻辑控制**
- `CompactIF` 是一个紧凑型的条件判断语句,如果条件满足则执行后续指令。
- `IF` 用于多条件分支,根据不同的条件执行不同的代码块。
- `FOR` 用于循环执行一段代码,次数由指定的计数器决定。
- `WHILE` 创建一个循环,只要指定条件满足,就会不断执行循环体。
- `TEST` 判断变量值,执行相应的程序分支。
- `GOTO` 用于无条件跳转到例行程序中的特定标签位置。
- `Label` 定义跳转目标,配合`GOTO`实现程序流程控制。
3. **停止程序执行**
- `Stop` 直接停止程序执行,但允许再次从停止点启动。
- `EXIT` 停止执行并阻止在停止点重启,通常用于程序结束。
- `Break` 用于调试,临时中断程序,手动恢复后继续执行。
- `SystemStopAction` 结合机器人运动停止,确保安全。
- `ExitCycle` 结束当前程序并重置程序指针到主程序开始。
4. **变量指令**
- `:=` 赋值操作符,用于给程序数据赋新的值。
- `WaitTime` 让程序暂停指定时间后再继续执行。
- `WaitUntil` 等待某个条件变为真后继续执行。
- `WaitDI` 根据输入信号状态等待。
- `WaitDO` 根据输出信号状态等待。
5. **程序注释**
- `comment` 用于添加程序注释,提高代码可读性。
6. **程序模块加载**
- `Load` 加载程序模块到运行内存,便于执行。
- `UnLoad` 卸载运行内存中的程序模块。
- `StartLoad` 在程序运行时加载模块。
- `WaitLoad` 连接加载到任务中的模块。
- `CancelLoad` 取消加载操作。
- `CheckProgRef` 检查程序间的引用关系。
- `Save` 保存程序模块到硬盘。
- `EraseModule` 从运行内存中删除模块。
7. **变量功能**
- `TryInt` 验证数据是否为有效整数。
- `OpMode` 获取当前机器人操作模式。
- `RunMode` 读取程序运行模式。
- `NonMotionMode` 查看程序任务是否在无运动模式下执行。
- `Dim` 获取数组的维度信息。
- `Present` 读取带参数例行程序的参数值。
- `IsPers` 判断参数是否为持久变量。
- `IsVar` 判断参数是否为变量。
8. **转换功能**
- 不完整的指令列表,可能包括了将数据类型转换为其他类型的指令,例如字符串转整数、浮点数等。
理解并熟练运用这些指令,将有助于编写出高效、灵活且易于维护的ABB机器人程序。通过掌握这些指令,可以更好地控制ABB机器人执行各种复杂的任务,包括精确的运动控制、逻辑处理和错误处理。
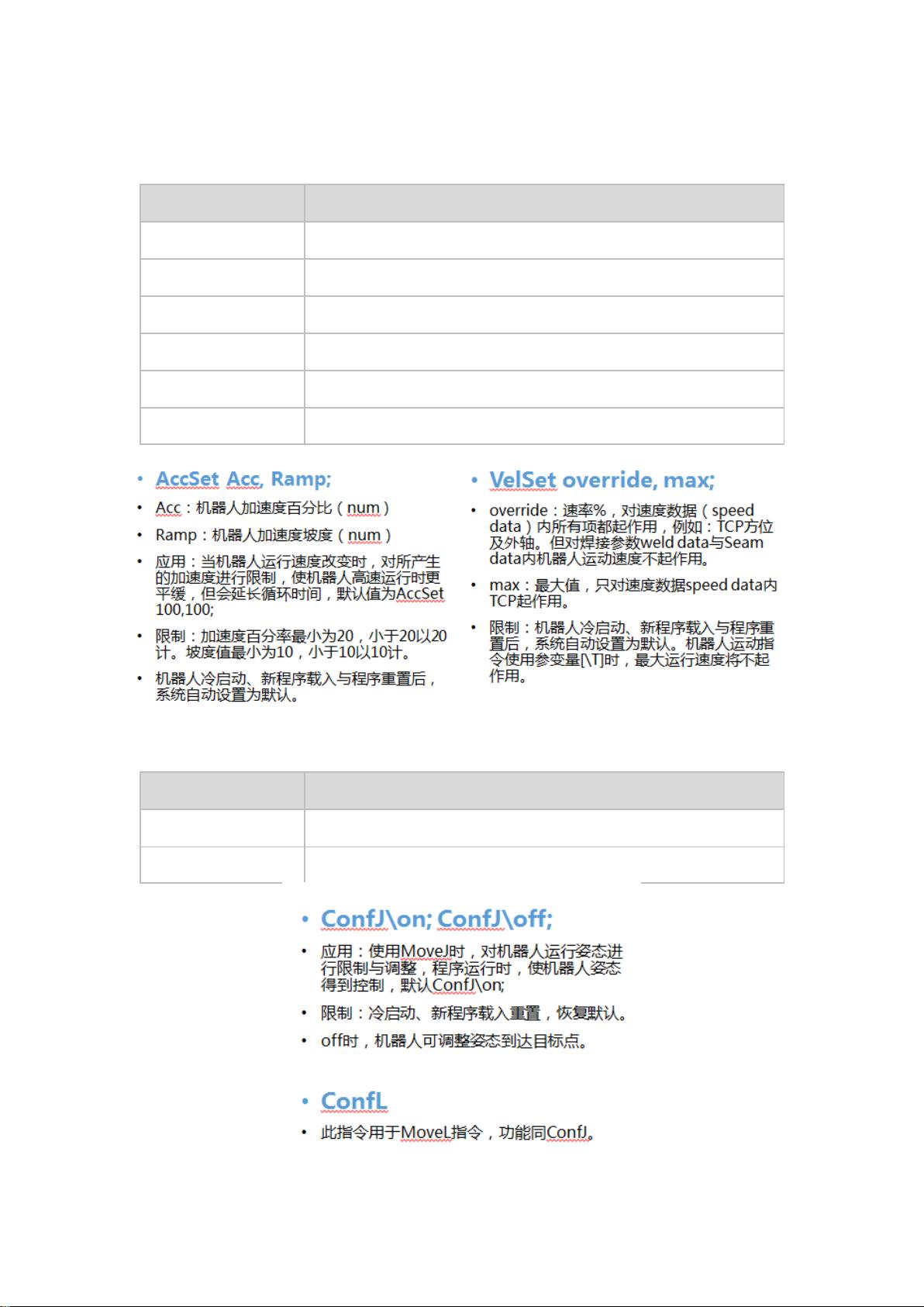
8.3.3 运动设定
1.速度设定
指令
说明
MaxRobSpeed
获取当前型号机器人可实现的最大 TCP 速度
VelSet
设定最大的速度与倍率
SpeedRefresh
更新当前运动的速度倍率
AccSet
定义机器人的加速度
WorldAccLim
设定大地坐标中工具与载荷的加速度
PathAccLim
设定运动路径中 TCP 的加速度
2.轴配置管理
指令
说明
ConfJ
关节运动的轴配置控制
ConfL
线性运动的轴配置控制
剩余19页未读,继续阅读
2019-02-12 上传
2023-05-08 上传
点击了解资源详情
2018-09-29 上传
2014-04-12 上传
2021-10-07 上传
2023-07-11 上传

weixin_44970340
- 粉丝: 2
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- JavaScript实现的高效pomodoro时钟教程
- CMake 3.25.3版本发布:程序员必备构建工具
- 直流无刷电机控制技术项目源码集合
- Ak Kamal电子安全客户端加载器-CRX插件介绍
- 揭露流氓软件:月息背后的秘密
- 京东自动抢购茅台脚本指南:如何设置eid与fp参数
- 动态格式化Matlab轴刻度标签 - ticklabelformat实用教程
- DSTUHack2021后端接口与Go语言实现解析
- CMake 3.25.2版本Linux软件包发布
- Node.js网络数据抓取技术深入解析
- QRSorteios-crx扩展:优化税务文件扫描流程
- 掌握JavaScript中的算法技巧
- Rails+React打造MF员工租房解决方案
- Utsanjan:自学成才的UI/UX设计师与技术博客作者
- CMake 3.25.2版本发布,支持Windows x86_64架构
- AR_RENTAL平台:HTML技术在增强现实领域的应用
