PID控制器解析:从基础到实践
需积分: 28 99 浏览量
更新于2024-07-26
收藏 344KB PDF 举报
"这篇文章主要介绍了PID控制器的基本概念和工作原理,以及如何在实际应用中简单地实现和调整PID控制。适合初学者理解PID控制的基础知识。"
PID控制器是一种广泛应用于工业自动化、航空航天、机器人和电子设备等领域的控制算法。它的核心在于结合比例(P)、积分(I)和微分(D)三个部分来调整系统的输出,以使系统尽可能接近期望的设定值。
1. **比例项(P)**: 比例项是当前误差(设定值与实际值之差)的直接反映。它对系统的响应速度有直接影响,能够快速调整输出,但可能会导致系统振荡。
2. **积分项(I)**: 积分项负责消除静态误差,即当系统稳定时,如果存在持续的误差,积分项会逐渐累积这个误差并调整输出,直到误差消除。然而,积分项可能导致系统缓慢响应或过度调整。
3. **微分项(D)**: 微分项预测未来的误差趋势,通过误差的变化率来调整输出。它可以减少系统的超调和振荡,提高稳定性,但微分项对噪声敏感,可能会引入额外的波动。
在实际应用中,PID控制器的实现并不复杂。例如,对于电机驱动齿轮组的控制,电机的转速和位置可以通过反馈传感器(如编码器或电位器)来测量。误差信号(设定值与实际值之差)分别输入到P、I、D项,计算出的总控制输出会驱动电机,调整其速度或位置,直至达到设定目标。
文章中提到了三个示例来阐述PID的使用场景:
1. **电机驱动齿轮组**: 这个例子展示了PID如何用于中等精度的位置控制,比如打印机驱动器或汽车巡航控制。
2. **精密定位系统**: 在需要高精度定位的场合,如机器人的精确移动,PID控制可以帮助系统准确到达目标位置。
3. **恒温系统**: PID也适用于温度控制,通过调整加热或冷却设备的功率,使系统温度保持在设定值附近。
PID控制是一种强大而灵活的工具,即使不深入控制理论,也能通过简单的理解和实践,实现有效的控制系统设计。通过调整PID参数(P、I、D的增益),可以优化系统性能,达到快速响应、稳定运行和最小化误差的目标。对于初学者来说,了解这些基础知识是进入控制工程领域的良好起点。
这一机构中的磁力与台板移动的力独立开来,好处就是使得台板不受外力的
影响,缺点就是造成系统非常“滑”,控制起来有难度。另外,电子必须的一个
好的电流输出形放大器和非接触式位置传感器做起来也有挑战。可以预计,如果
是你做了这样一个项目(或者是接了个短期项目),你就是这个相当优秀的团队
中一员。
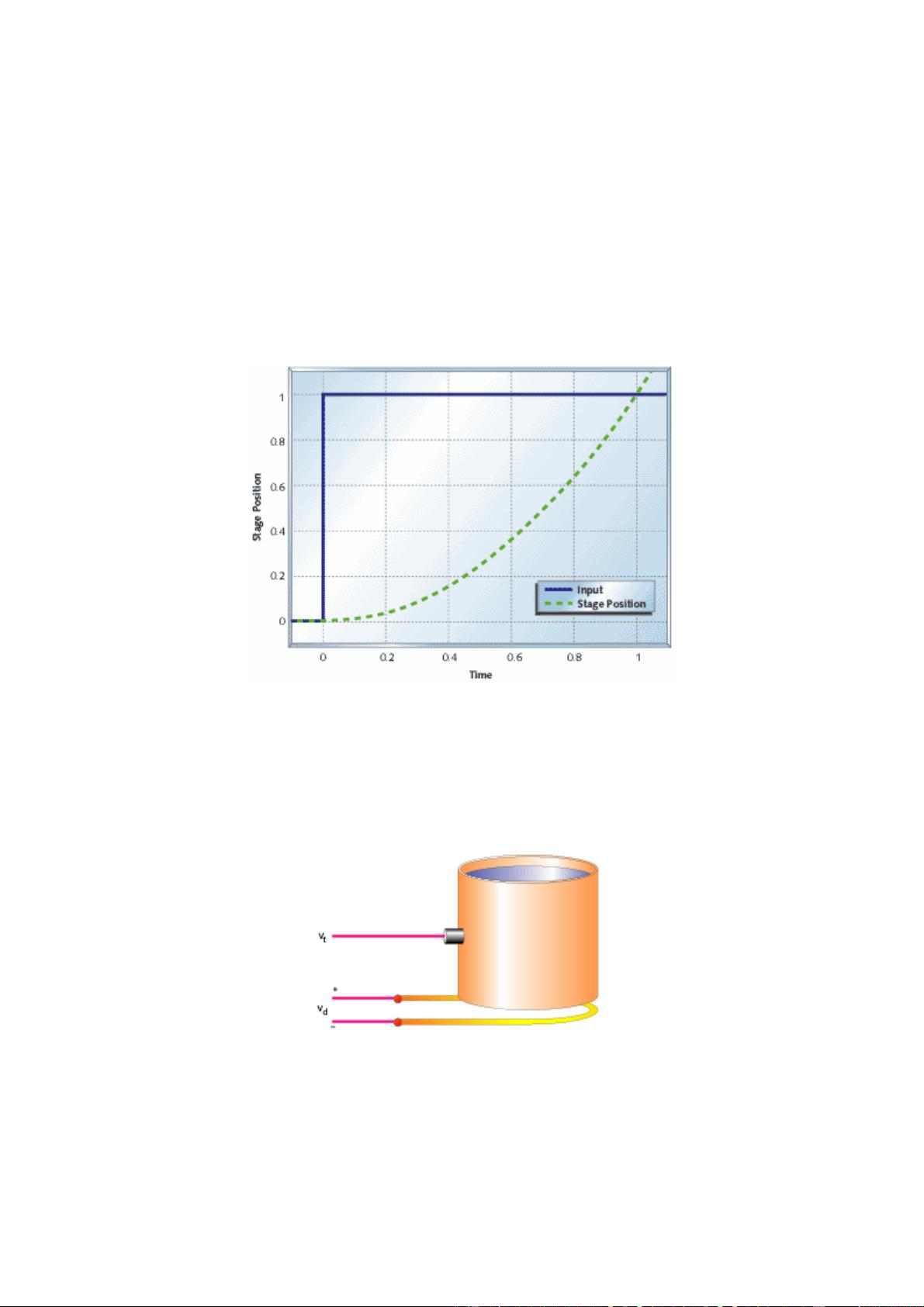
这个系统的运动方程非常简单,台板上的力只与驱动命令成比例关系,所以
系统的加速度与驱动输出也是成比例关系。系统自身的阶跃响应是一条抛物线,
见图 5。由于有惯性,台板动起来就会一直动,这会导致系统控制更加困难,这
个我会在后面讲到。
图 5:精密驱动器位置 vs. 时间
温度控制
第三个例子是一个加热器,图 6 显示了系统简单示意图。电加热器加热一个
大容器,通过温度传感装置来获得温度值。
图 6:加热器
加热系统往往具有非常复杂的响应,我准备忽略一些细节,给出一个非常近
似的模型,除非你对性能要求非常严格,那么一个精确的模型没什么必要。
图 7 显示了在 Vd(一定电压值?)下该系统的阶跃响应的变化。时间常量
剩余15页未读,继续阅读
2021-10-03 上传
2014-09-11 上传
2022-09-25 上传
2019-01-24 上传
2020-03-24 上传
2013-08-01 上传
2020-02-16 上传
2023-05-24 上传
2020-12-05 上传

haimaodawang
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- BottleJS快速入门:演示JavaScript依赖注入优势
- vConsole插件使用教程:输出与复制日志文件
- Node.js v12.7.0版本发布 - 适合高性能Web服务器与网络应用
- Android中实现图片的双指和双击缩放功能
- Anum Pinki英语至乌尔都语开源词典:23000词汇会话
- 三菱电机SLIMDIP智能功率模块在变频洗衣机的应用分析
- 用JavaScript实现的剪刀石头布游戏指南
- Node.js v12.22.1版发布 - 跨平台JavaScript环境新选择
- Infix修复发布:探索新的中缀处理方式
- 罕见疾病酶替代疗法药物非临床研究指导原则报告
- Node.js v10.20.0 版本发布,性能卓越的服务器端JavaScript
- hap-java-client:Java实现的HAP客户端库解析
- Shreyas Satish的GitHub博客自动化静态站点技术解析
- vtomole个人博客网站建设与维护经验分享
- MEAN.JS全栈解决方案:打造MongoDB、Express、AngularJS和Node.js应用
- 东南大学网络空间安全学院复试代码解析
