"PLC小车自动往返控制完整资料:设计、安装与调试"
170 浏览量
更新于2024-03-12
3
收藏 10MB DOC 举报
本项目是基于PLC小车自动往返控制的完整资料,旨在利用PLC完成小车自动往返控制线路的安装与调试。项目要求按下正转启动按钮后,电动机正向连续运转使小车右行,直到小车碰到SQ1停止并延时1秒后向左行。反转启动按钮则使小车左行,碰到SQ2停止并延时1秒后向右行。停止按钮可让电动机停止运转,而SQ3和SQ4为小车运行的左右行极限位开关。控制线路具有短路保护、过载保护等完善的保护措施。在团队合作下,设计出PLC的I/O分配表、电气原理图,选择安装所需电器元件,并正确编制出PLC程序,完成任务运行调试。任务要求进行了电动机继电器控制线路的任务目标和相关理论知识的介绍,以及PLC的基本知识包括确定I/O的个数和分配。
对于这个项目,首先需要了解电动机继电器控制线路的任务目标及相关理论知识。这包括了理解正转、反转、停止按钮的功能,以及小车与SQ1、SQ2、SQ3、SQ4的互动关系。在PLC的基本知识部分,需要明确控制要求并确定I/O的个数,进行I/O的分配。在团队合作下,需要设计I/O分配表、电气原理图,并规范完成线路的安装与配线。
本项目的核心在于PLC小车自动往返控制,通过PLC完成了小车自动往返的任务。其原理是通过正转、反转、停止按钮来控制电动机的运转,从而使得小车能够实现左右来回移动。在这个过程中,还设计了短路保护、过载保护等完善的保护措施,以确保设备的安全运行。
整个项目体现了团队合作的精神,各小组共同努力,设计出了I/O分配表、电气原理图,选择合适的电器元件,完成了线路的安装与配线,并正确编制出PLC程序。通过空载与带载实验的运行调试,最终完成了项目的目标。
在关于PLC基本知识的部分,还介绍了在控制要求下确定I/O个数和进行I/O分配的过程。这个过程体现了对实际控制需求的分析和理解,以及对PLC系统的灵活应用和配置。
总的来说,基于PLC小车自动往返控制的这个项目是一个集团队合作、理论知识、实际应用为一体的综合性项目。通过这个项目,团队成员不仅加深了对PLC系统的理解和应用,也培养了团队合作精神和解决实际问题的能力。该项目旨在提供完整的资料和操作指南,方便有需要的用户直接使用或进行相关的编辑修改,以满足不同需求。

1。1 自动门的具体应用
当人们行走在人行道上时,我们可以看到各类银行矗立在马路两边,而我们可以看到许
多人在银行中进进出出,但是我们可以看到人们只是在银行门口稍作停留,银行的大门就会
自动打开,当人们进入或离开一段距离后大门就会自动关闭,这种情况可以说是屡见不鲜,而
银行所使用的能够自动开关的就是自动门。自动门在银行中的使用可以说大大方便了人们的
进出,并且在进出频繁的时候能够有效缓解人流量大时所带来的问题。可以说在银行中自动
门已成为不可或缺的一部分。下面我们就来看一下自动门在银行中的应用.
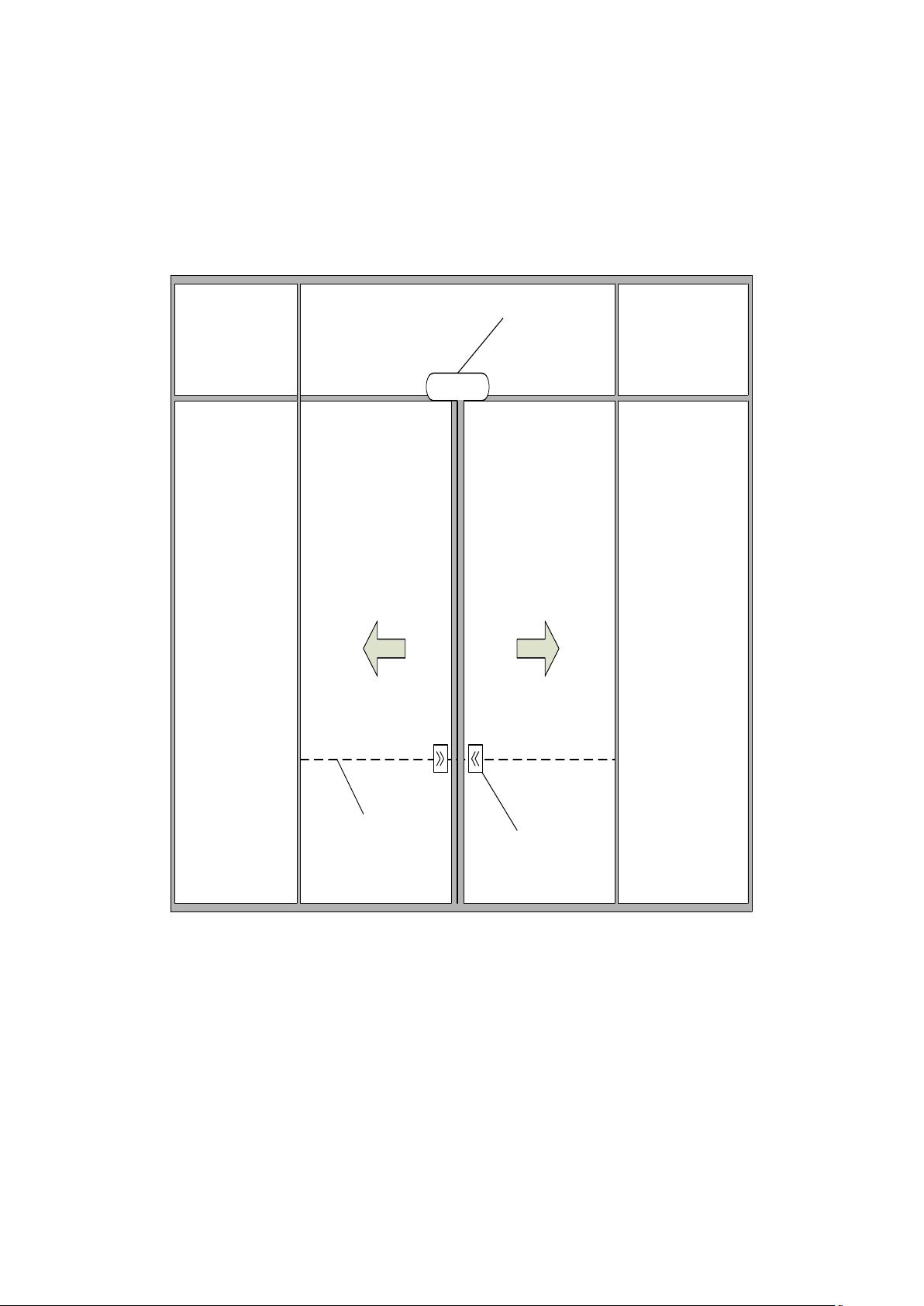
下面认识一下自动门,如图1-1 所示
图 1—1自动门图片
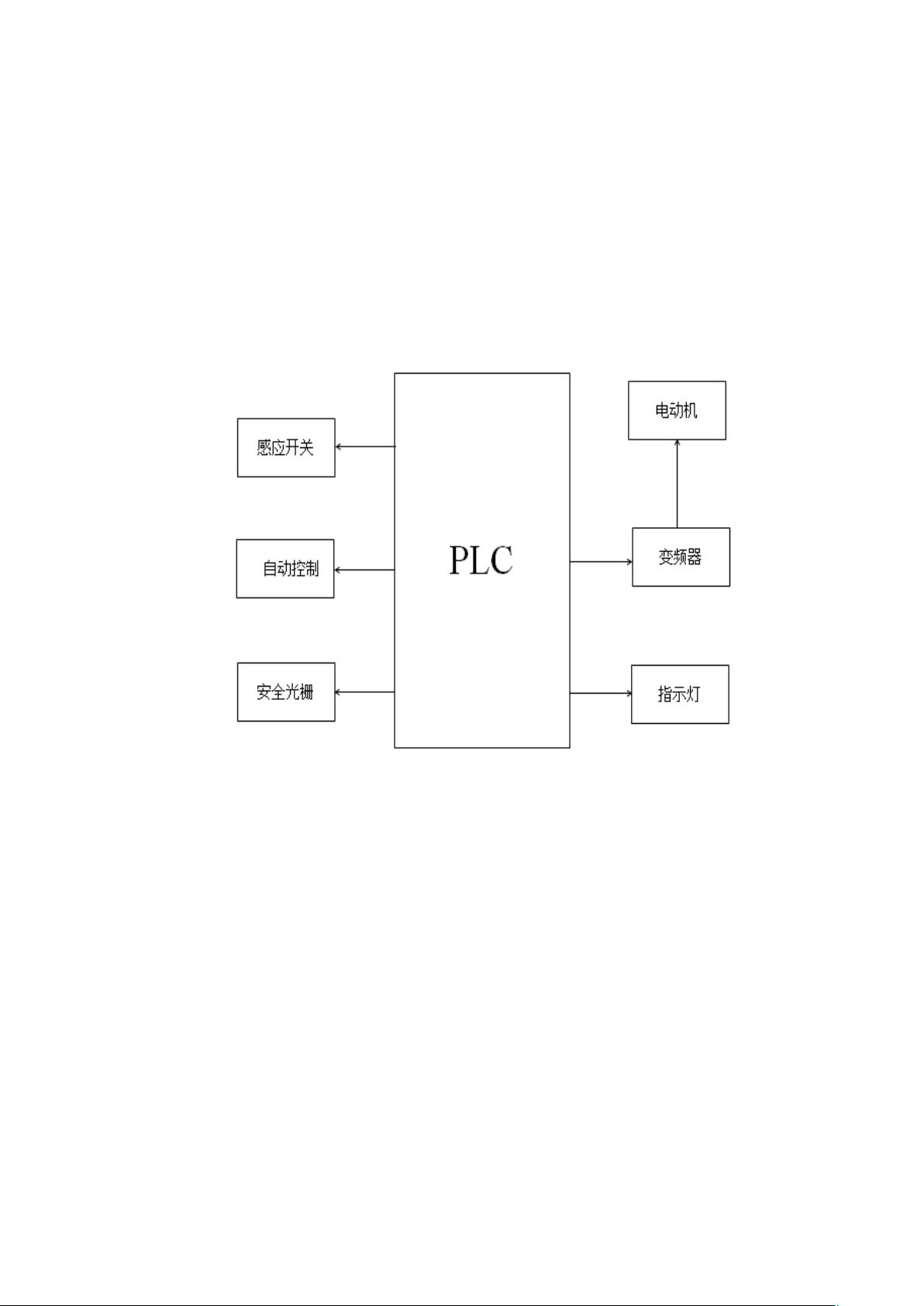
1.2 自动门的组成部件
主要部件包括主控制器:它是自动门的指挥中心.感应开关:负责采集外部信号。动力马
达:提供开门与关门的动力。门扇行进轨道:主要是约束门扇的吊具走轮系统。门扇吊具走
轮系统:用于吊挂活动门扇,牵引动门扇运行.同步皮带:用于传输马达产生的动力。下部导
向系统:是门扇下部的导向与定位装置。
辅助配置包括行程开关:用来判断自动门所处的位置.防夹人光栅:防止自动门的
夹人。后备电源:保证停电时自动门能工作正常。

剩余107页未读,继续阅读
2024-07-03 上传
2021-09-24 上传
271 浏览量
2021-10-12 上传
2024-07-03 上传

matlab大师
- 粉丝: 2798
- 资源: 8万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- ACCP-SQL_ 第二章资料
- IBM-PC汇编语言程序设计课后答案
- Design Patterns Workbook 英文版 (pdf)
- C++文件输入输出的使用
- 高质量的C++编程 C++
- ABAP4编程宝典中文版
- C#,ASP.NET程序员面试题
- MyEclipse 6 Java 开发中文教程
- MA0003 移动智能网原理
- javascript
- C%2B%2B+GUI+Programming+with+Qt4.pdf
- Teniga Javascript Edito
- 图文实例教你如何用路由设置共享上网
- 基于arm平台程序设计介绍
- VMware Workstation 6 基本使用
- ubuntu基本资料
