基于虚拟科里奥利力的MEMS陀螺仪新型标定法
89 浏览量
更新于2024-08-27
收藏 421KB PDF 举报
本文主要探讨了一种基于虚拟科里奥利力的新型MEMS(微机电系统)陀螺仪比例因子标定方法。作者Jimeng Zhang、Chunhua He等人来自北京大学的研究团队,他们隶属于国家微纳制造科学与技术重点实验室,该实验室位于北京。研究的焦点在于如何利用系统产生的可编程频率和幅度电压信号来模拟外部角速度信号所引发的科里奥利力,从而在陀螺仪控制系统的发展过程中发挥作用。
传统的陀螺仪标定通常依赖于复杂的实验设置和外部扰动,而新方法通过虚拟科里奥利效应提供了一个更为便捷且精确的方法。这种方法允许数字控制系统直接测量陀螺仪的频率响应,并有效地检测参考虚拟角速度信号的频率响应特性。通过这种方式,研究人员能够实现对陀螺仪精度的精细控制,提升其稳定性和准确性,这对于高精度导航、惯性测量和自动驾驶等领域具有重要意义。
该论文的核心内容包括以下几个方面:
1. **虚拟科里奥利力原理**:论文深入阐述了如何利用系统的可编程信号来模拟真实世界中的科里奥利效应,这是一种由地球自转或物体旋转时产生的附加力,对于陀螺仪来说是难以避免的干扰因素。
2. **控制系统应用**:新方法不仅改进了陀螺仪本身的性能,还对控制系统的开发有所贡献,使得控制算法能够更有效地校准比例因子,提高设备的整体性能。
3. **实验验证**:通过实验证明,数字化控制系统能够有效捕捉陀螺仪的频率响应特性,以及准确地识别和校正虚拟角速度信号,这为实际应用提供了坚实的基础。
4. **关键词**:文章的关键术语包括“MEMS陀螺仪”、“虚拟科里奥利”和“比例因子标定”,这些词汇强调了研究的核心技术和关注点。
这篇研究论文提出了一种创新的MEMS陀螺仪标定策略,通过虚拟科里奥利力的模拟,简化了标定过程,提高了设备的精度和稳定性,为微电子领域的传感器技术做出了重要贡献。这项工作具有广泛的应用前景,尤其是在需要高精度测量和动态环境适应性的领域。
A Novel Scale Factor Calibration Method for a
MEMS Gyroscope Based on Virtual Coriolis Force
Jimeng Zhang
1,2
, Chunhua He
2
, Yuxian Liu
2
, Dachuan Liu
2
, Qiancheng Zhao
2
, Zhenchuan Yang
*2
and Guizhen Yan
2
1
Shenzhen Graduate School, Peking University
2
National Key Laboratory of Science and Technology on Micro/Nano Fabrication,
Institute of Microelectronics, Peking University,
Beijing, 100871 China
*Email: z.yang@pku.edu.cn
Abstract—This paper presents a novel scale factor
calibration method for a MEMS vibratory gyroscope based on
virtual Coriolis force. Frequency and amplitude
programmable voltage signals generated by the system can be
used to emulate the Coriolis force induced by external angular
rate signals. The system contributes to the development
procedure of control system for gyroscope and provides a scale
factor calibration method for the digital control system of a
gyroscope. The experiment results show the digital system can
acquire the frequency response of gyroscope and detect the
frequency response of reference virtual rate signal effectively.
Keywords—MEMS gyroscope; virtual Coriolis; scale factor
calibration; self-test
I. INTRODUCT ION
MEMS v ibratory gyroscopes have wide range
applications in various fields for their outstanding features
such as small size, low cost as well as good integration
capability. The optimu m perfo rmance of the sensor not only
depends on the mechanical structure design, but also the
signal conditioning circuit. In recent years, the digital
control system is popularly used for MEMS gyroscopes,
because it’s precise, robust against environment variations,
and flexible to design.
Scale factor is the relation of the measured voltage and
the input angular rate. A tradit ional method to evaluate scale
factor is based on the real rate-table, which may be difficult
when the frequency response testing needs the angular rate
with several hundred hertz frequency. Besides, self-test and
real time calibration of the scale factor after being installed
is necessary when it operates in extreme environ ments. In
such case, the working environment may change
significantly and it may be unfeasible to test the gyroscope
using the real rate-table.
Some scale factor self-calibration techniques are
reported in the literature. In [1], a modulated square-wave
dither signal works as the virtual rate signal of a closed-loop
operated vibratory gyroscope to continuously detect and
calibrate the scale factor drift. However, the calibration can
be only achieved by using the whole-angle mode of the
MEMS Quad Mass Gyroscope, it can’t be used in traditional
vibration gyroscopes . Another scale factor self-calibration
method [2] generates a reference to Coriolis force by using
the gravitational force on the gyroscope proof mass to
obtain the scale factor of the gyroscope. However, this
method is static calibration, which can’t be used when the
gyroscope is mounted on the object. Another scale factor
calibrat ion method is using an additional oscillator to
superimpose another vibration with a certain signal to the
normal vibration for angular measurement [3]. Then the
response of the certain signal shows the operation status of
the sensor and can be used as a reference for scale factor
calibrat ion. Obviously, the disadvantage is that there must
have the additional oscillator added in the mechanical
structure.
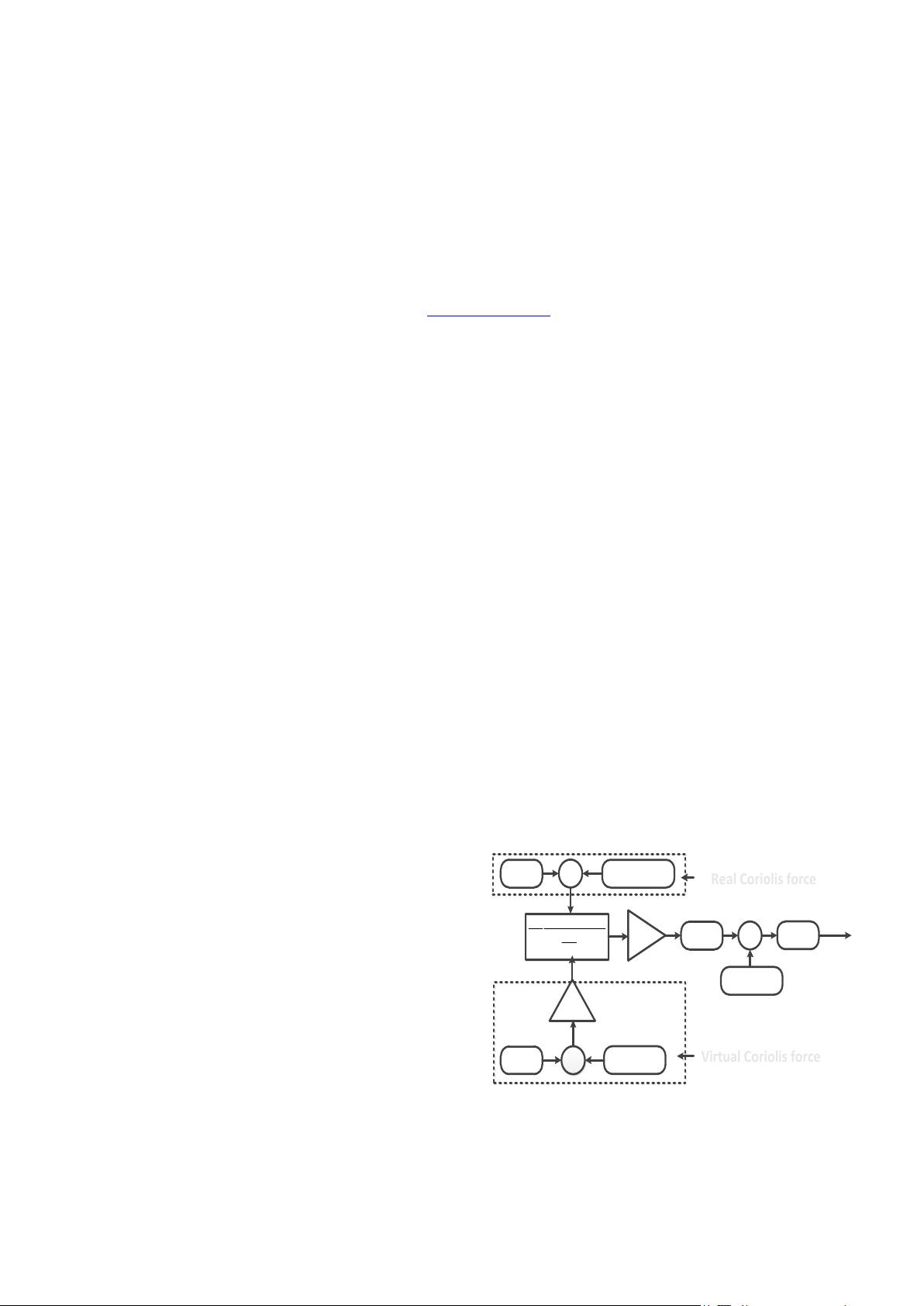
This paper presents a novel scale factor calibration
method for a M EMS v ibratory gyroscope based on virtual
Coriolis force [4]. The v irtual Corio lis force is feasible to
emu late the high frequency external angular rate and can be
easily achieved by exciting a part of force feedback
electrodes by the modulated signal constructed from v irtual
vibration velocity and virtual angular rate signals. The
designed digital system in this paper can detect the
frequency response of the reference v irtual rate signal
effectively. As the frequency response of virtual Coriolis
force can reflect the working environment changes of the
gyroscope, it provides a self-test method and makes it
possible for the real time calibrat ion of scale factor for a
gyroscope.
II. PRINCIPLE OF OPERAT ION
A. Vrtual Coriolis force analysis
cos( )
nd s
t
x
22
11
ns
ns
s
s
S
Q
s
m
cos
or
t
x
2 cos
d d nd nd
m A t
4
fd vf
KK
dc cv
KK
cos
ac r
Vt
HPF
x
LPF
o
U
Real Coriolis force
Real Coriolis force
Virtual Coriolis force
Virtual Coriolis force
cos
fa nd
Vt
Fig. 1. Virtual Coriolis force and real Coriolis force signal flow for a
gyroscope.
Proceedings of the 10th IEEE International Conference on
Nano/Micro Engineered and Molecular Systems (IEEE-NEMS 2015)
Xi’an, China, April 7-11, 2015
978-1-4673-6695-3/15/$31.00 ©2015 IEEE
58
下载后可阅读完整内容,剩余4页未读,立即下载
200 浏览量
105 浏览量
102 浏览量
211 浏览量
124 浏览量
197 浏览量
105 浏览量
142 浏览量

weixin_38669881
- 粉丝: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- VB通过Modbus协议控制三菱PLC通讯实操指南
- simfinapi:R语言中简化SimFin数据获取与分析的包
- LabVIEW温度控制上位机程序开发指南
- 西门子工业网络通信实例解析与CP243-1应用
- 清华紫光全能王V9.1软件深度体验与功能解析
- VB实现Access数据库数据同步操作指南
- VB实现MSChart绘制实时监控曲线
- VC6.0通过实例深入访问Excel文件技巧
- 自动机可视化工具:编程语言与正则表达式的图形化解释
- 赛义德·莫比尼:揭秘其开创性技术成果
- 微信小程序开发教程:如何实现模仿ofo共享单车应用
- TrueTable在Windows10 64位及CAD2007中的完美适配
- 图解Win7搭建IIS7+PHP+MySQL+phpMyAdmin教程
- C#与LabVIEW联合采集NI设备的电压电流信号并创建Excel文件
- LP1800-3最小系统官方资料压缩包
- Linksys WUSB54GG无线网卡驱动程序下载指南
