DSP+FPGA实现的机器人声控系统:轻量化与高效能
 已收录资源合集
已收录资源合集
需积分: 0 127 浏览量
更新于2024-08-31
收藏 284KB PDF 举报
"基于DSP和FPGA的机器人声控系统设计"
本文主要探讨了一种基于数字信号处理器(DSP)和现场可编程门阵列(FPGA)的机器人声控系统设计,这种设计旨在优化传统PC机为基础的机器人控制系统,解决其在小型化、低功耗和成本效率上的不足。系统主要由语音信号采集和播放、FPGA控制的步进电机驱动两大部分构成,同时还包含了语音识别的关键技术。
2. 系统硬件总体设计
系统硬件的核心是语音信号的采集和播放以及步进电机的控制。DSP负责处理语音指令,并通过FPGA向步进电机驱动芯片发送控制信号,驱动步进电机执行相应动作。外部FLASH存储系统程序和语音库,JTAG接口用于PC机的在线仿真,键盘则提供了参数设置和功能切换的交互方式。
3. 语音识别系统设计
- 语音信号的特点:语音信号通常在300~3400Hz范围内,采用8kHz采样率符合采样定理。考虑到“短时性”,系统设置语音信号帧长为20ms,帧移为10ms,每帧数据为160×16位。
- 语音信号采集和播放:采用TI公司的TLV320AIC23B芯片,它集成了ADC和DAC,支持8k采样率的单声道输入和双声道输出。通过DSP的I2C接口可以配置TLV320AIC23B的控制寄存器,实现对音频接口的编程。
该系统通过FPGA实现对语音识别结果的快速响应,生成步进电机的控制信号。FPGA的优势在于高速并行处理能力,能实时处理来自DSP的指令,确保电机动作的精确和及时。同时,系统的模块化设计使得系统升级和功能扩展变得更为便捷。
4. FPGA在系统中的作用
FPGA在系统中扮演了关键的角色,它不仅接收和解析DSP的指令,还生成步进电机所需的正反转信号和脉冲,确保电机按照预设的指令精确转动。这大大提高了系统的反应速度和控制精度,适应了机器人在复杂环境下的工作需求。
5. 性能优势
相比于传统的基于PC机的系统,基于DSP和FPGA的声控系统具有体积小、功耗低、成本效益高的优点,更利于实现机器人的小型化和在不同环境下的应用。此外,由于减少了PC机的依赖,系统的运行更加独立和稳定。
该设计巧妙地结合了DSP的高效信号处理能力和FPGA的灵活并行处理特性,构建了一个高效、可靠的机器人声控系统,为未来机器人技术的发展提供了新的思路和实践基础。
基于基于DSP和和FPGA的机器人声控系统设计的机器人声控系统设计
机器人听觉系统主要是对人的声音进行语音识别并做出判断,然后输出相应的动作指令控制头部和手臂的动
作,传统的机器人听觉系统一般是以PC机为平台对机器人进行控制,其特点是用一台计算机作为机器人的信息
处理核心通过接口电路对机器人进行控制,虽然处理能力比较强大,语音库比较完备,系统更新以及功能拓展
比较容易,但是比较笨重,不利于机器人的小型化和复杂条件下进行工作,此外功耗大、成本高
2 系统硬件总体设计
系统的硬件功能是实现语音指令的采集和步进电机的驱动控制,为系统软件提供开发和调试平台。如图1所示。
系统硬件分为语音信号的采集和播放,基于
FPGA根据DSP输入的动作指令产生正确的正反转信号和准确的脉冲给步进电机驱动芯片,驱动芯片提供步进电机的驱动信
号,控制步进电机的转动。片外FLASH用于存储系统程序和语音库并完成系统的上电加载。JTAG口用于与PC机进行联机在
线仿真,键盘则用于参数调整和功能的切换。
3 语音识别系统设计
3.1 语音信号的特点
语音信号的频率成分主要分布在300~3400Hz之间,根据采样定理选择信号的采样率为8 kHz。语音信号的一个特点在于他
的"短时性",有时在一个短时段呈现随机噪声的特性,而另一段表现周期信号的特性,或二者兼而有之。语音信号的特征是随
时间变化的,只有一段时间内,信号才表现稳定一致的特征,一般来说短时段可取5~50 ms,因此语音信号的处理要建立在
其"短时性"上[2],系统将语音信号帧长设为20 ms,帧移设为10 ms,则每帧数据为160×16 b。
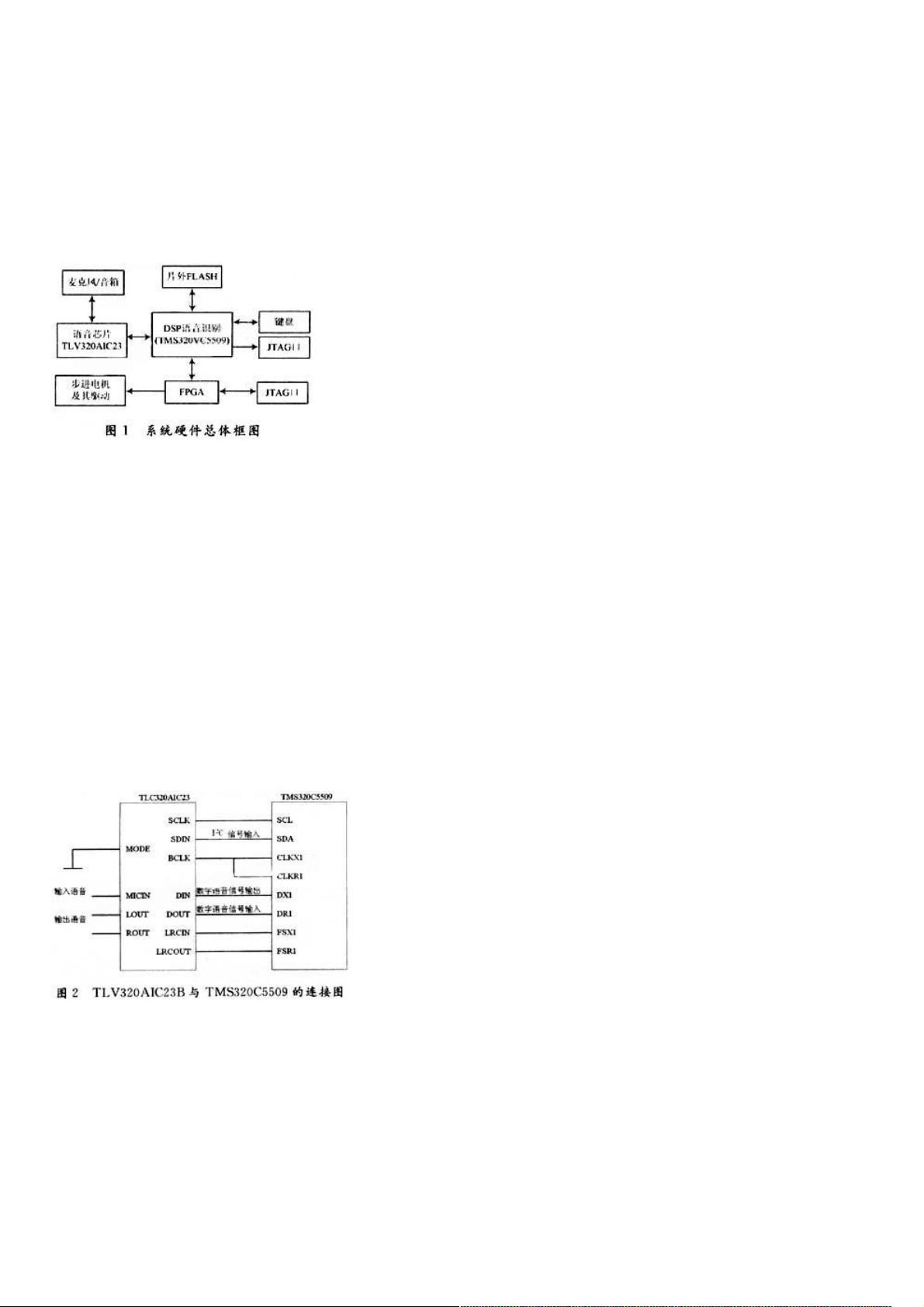
3.2 语音信号的采集和播放
语音采集和播放芯片采用的是TI公司生产的TLV320AIC23B,TLV320AIC23B的模数转换(ADC)和数模转换(DAC)部件高度集
成在芯片内部,芯片采用8 k采样率,单声道模拟信号输入,双声道输出。TLV320AIC23具有可编程特性,DSP可通过控制接
口来编辑该器件的控制寄存器,而且能够编译SPI,I2C两种规格的接口,TLV320AIC23B与DSP5509的电路连接如图2所示。
DSP采用I2C口对TLV320AIC23的寄存器进行设置。当MODE=O时,为I2C规格的接口,DSP采用主发送模式,通过I2C口对
地址为0000000~0001111的11个寄存器进行初始化。I2C模式下,数据是分为3个8 b写入的。而TLV320AIC23有7位地址和9
位数据,也就是说,需要把数据项上面的最高位补充到第二个8 B中的最后一位。
MCBSP串口通过6个引脚CLKX,CLKR,FSX,FSR,DR和CX与TLV320AIC23相连。数据经MCBSP串口与外设的通信通过
DR和DX引脚传输,控制同步信号则由CLKX,CLKR,FSX,FSR四个引脚实现。将MCBSP串口设置为DSP Mode模式,然
后使串口的接收器和发送器同步,并且由TLV320AIC23的帧同步信号LRCIN,LRCOUT启动串口传输,同时将发送接收的数
据字长设定为32 b(左声道16 b,右声道16 b)单帧模式。
3.3 语音识别程序模块的设计
为了实现机器人对非特定人语音指令的识别,系统采用非特定人的孤立词识别系统。非特定人的语音识别是指语音模型由不同
年龄、不同性别、不同口音的人进行训练,在识别时不需要训练就可以识别说话人的语音[2]。系统分为预加重和加窗,短点
检测,特征提取,与语音库的模式匹配和训练几个部分。
下载后可阅读完整内容,剩余3页未读,立即下载
2019-09-05 上传
2020-10-19 上传
2020-10-21 上传
2020-08-05 上传
2020-12-13 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

weixin_38723192
- 粉丝: 8
- 资源: 870
 我的内容管理
展开
我的内容管理
展开







最新资源
- CoreOS部署神器:configdrive_creator脚本详解
- 探索CCR-Studio.github.io: JavaScript的前沿实践平台
- RapidMatter:Web企业架构设计即服务应用平台
- 电影数据整合:ETL过程与数据库加载实现
- R语言文本分析工作坊资源库详细介绍
- QML小程序实现风车旋转动画教程
- Magento小部件字段验证扩展功能实现
- Flutter入门项目:my_stock应用程序开发指南
- React项目引导:快速构建、测试与部署
- 利用物联网智能技术提升设备安全
- 软件工程师校招笔试题-编程面试大学完整学习计划
- Node.js跨平台JavaScript运行时环境介绍
- 使用护照js和Google Outh的身份验证器教程
- PHP基础教程:掌握PHP编程语言
- Wheel:Vim/Neovim高效缓冲区管理与导航插件
- 在英特尔NUC5i5RYK上安装并优化Kodi运行环境
