
五邑大学本科毕业设计
3
第 2 章 机器人硬件系统
2.1 整体框架
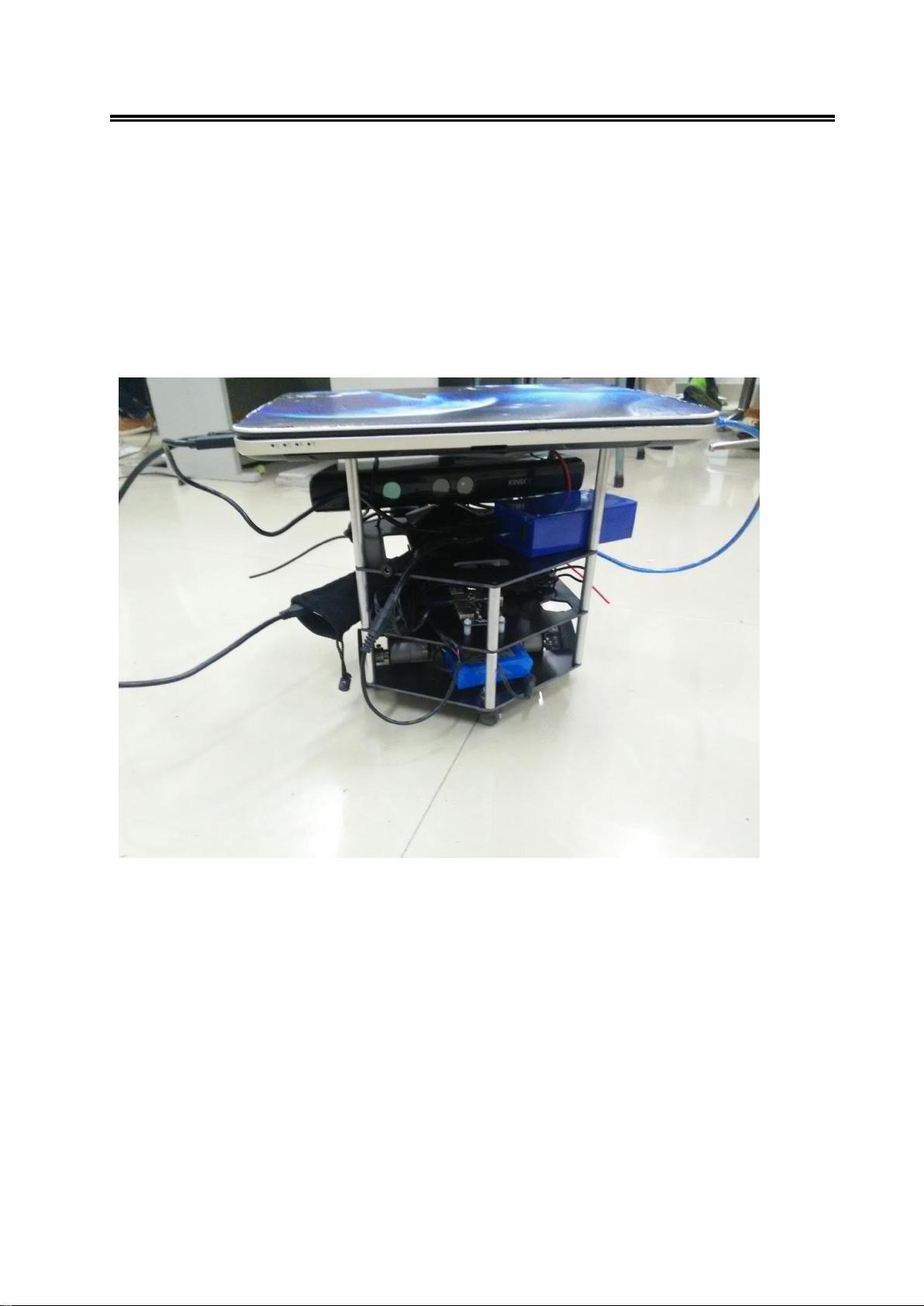
为了能够实现目标跟踪与路径规划,我们采用微软公司的
kinect
作为移动机器人的“眼
睛”,用来获取跟踪目标与所在环境的信息。移动机器人采用
M-robot,
是一群机器人爱好
者开发的一款简易移动机器人。
系统如图
2-1
所示。
图 2-1 硬件平台
2.2 M-robot 机器人介绍
这个平台基于
ROS
开源系统构建,可实现室内建立地图和导航,能够作为
ROS
的学
习平台,不能达到消费级产品的稳定性导航效果,可以在开源算法的基础上继续优化得到
更好地效果。该移动机器人系统包括:
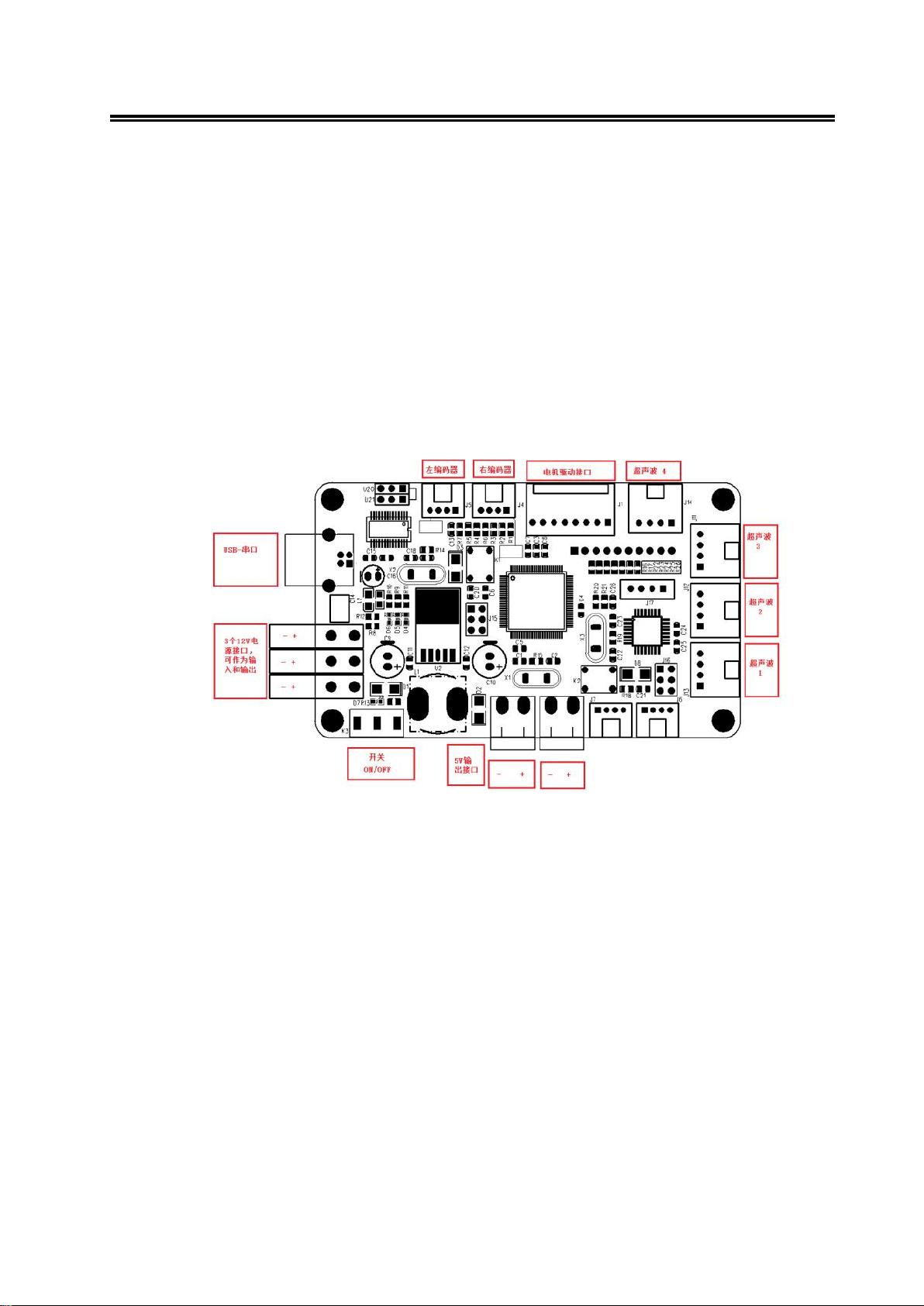
(
1
)底层采用自制的
Arduino2560
控制(
2560+328
双控制芯片),遵循
iRobot
开源
协议。
(
2
)拥有独立于
ROS
之外的接口:
4
个超声波接口,
2
个舵机控制接口,
1
个
UART
接口,一个
I2C
接口。
(
3
)上位机采用笔记本电脑。
(
4
)系统参数:净重
3KG
,负载能力
5KG
,主动轮
2
个,全向轮
1
个,采用差分驱
剩余36页未读,继续阅读

无能为力就要努力
- 粉丝: 18
- 资源: 332
 我的内容管理
展开
我的内容管理
展开







最新资源
- ExtJS 2.0 入门教程与开发指南
- 基于TMS320F2812的能量回馈调速系统设计
- SIP协议详解:RFC3261与即时消息RFC3428
- DM642与CMOS图像传感器接口设计与实现
- Windows Embedded CE6.0安装与开发环境搭建指南
- Eclipse插件开发入门与实践指南
- IEEE 802.16-2004标准详解:固定无线宽带WiMax技术
- AIX平台上的数据库性能优化实战
- ESXi 4.1全面配置教程:从网络到安全与实用工具详解
- VMware ESXi Installable与vCenter Server 4.1 安装步骤详解
- TI MSP430超低功耗单片机选型与应用指南
- DOS环境下的DEBUG调试工具详细指南
- VMware vCenter Converter 4.2 安装与管理实战指南
- HP QTP与QC结合构建业务组件自动化测试框架
- JsEclipse安装配置全攻略
- Daubechies小波构造及MATLAB实现
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


