基于图模型随机游走的视觉跟踪方法
86 浏览量
更新于2024-08-26
收藏 768KB PDF 举报
"本文提出了一种利用图模型上的随机游走进行视觉跟踪的新方法,将超级像素节点和它们之间的关系表示为边,并结合马尔可夫随机游走理论,构建了两个创新的图模型,一个用于全局搜索特征相似的候选节点,另一个用于模拟连续帧间的时空连贯性。最后通过结构模型综合了随机游走得到的外观相似度和目标不同部分显示的内部空间布局,以生成最终的置信地图。"
在"通过图模型上的RandomWalks进行视觉跟踪"这篇研究论文中,作者Xiaoli Li, Zhifeng Han, Lijun Wang和Huchuan Lu提出了一种基于图理论的视觉跟踪新框架。他们将视觉跟踪问题转化为在图模型上进行随机游走的问题,其中图的节点代表图像中的超级像素,而边则表示这些超级像素之间的相互关系。
首先,他们建立了一个遍历性的马尔可夫链(Ergodic Markov Chain),这个链的目标是在全局范围内寻找与模板节点(即目标对象的初始状态)特征相似的节点。遍历性确保了游走能够在图中所有节点间均匀分布,从而能有效地搜索到与目标特征匹配的节点。
其次,为了捕捉时间序列中的目标连续性,作者引入了吸收马尔可夫链(Absorbing Markov Chain)。这种链能够模拟从一帧到下一帧的目标运动,通过将前一帧的目标状态作为吸收态,来保持跟踪过程的稳定性,增强目标在时间上的连贯性。
接下来,他们提出了一种结构模型,将上述两个马尔可夫链的结果相结合。该结构模型不仅考虑了由随机游走计算出的外观相似度,还考虑了目标不同部分的空间布局信息。这样,通过综合分析,可以生成一张表示每个像素属于目标概率的置信地图,从而更准确地进行目标定位和跟踪。
论文中,作者对提出的马尔可夫链方法和结构模型进行了定性和定量的评估,证明了这种方法的有效性。通过这种方法,即使在复杂的场景变化和遮挡情况下,也能实现稳定且准确的视觉跟踪。
这篇文章提出了一种新颖的视觉跟踪策略,它利用图模型和随机游走理论,结合了全局搜索和时空连贯性,提高了跟踪算法的性能,对于视觉跟踪领域的研究具有重要的理论价值和实践意义。
This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
LI et al.: VISUAL TRACKING VIA RANDOM WALKS ON GRAPH MODEL 3
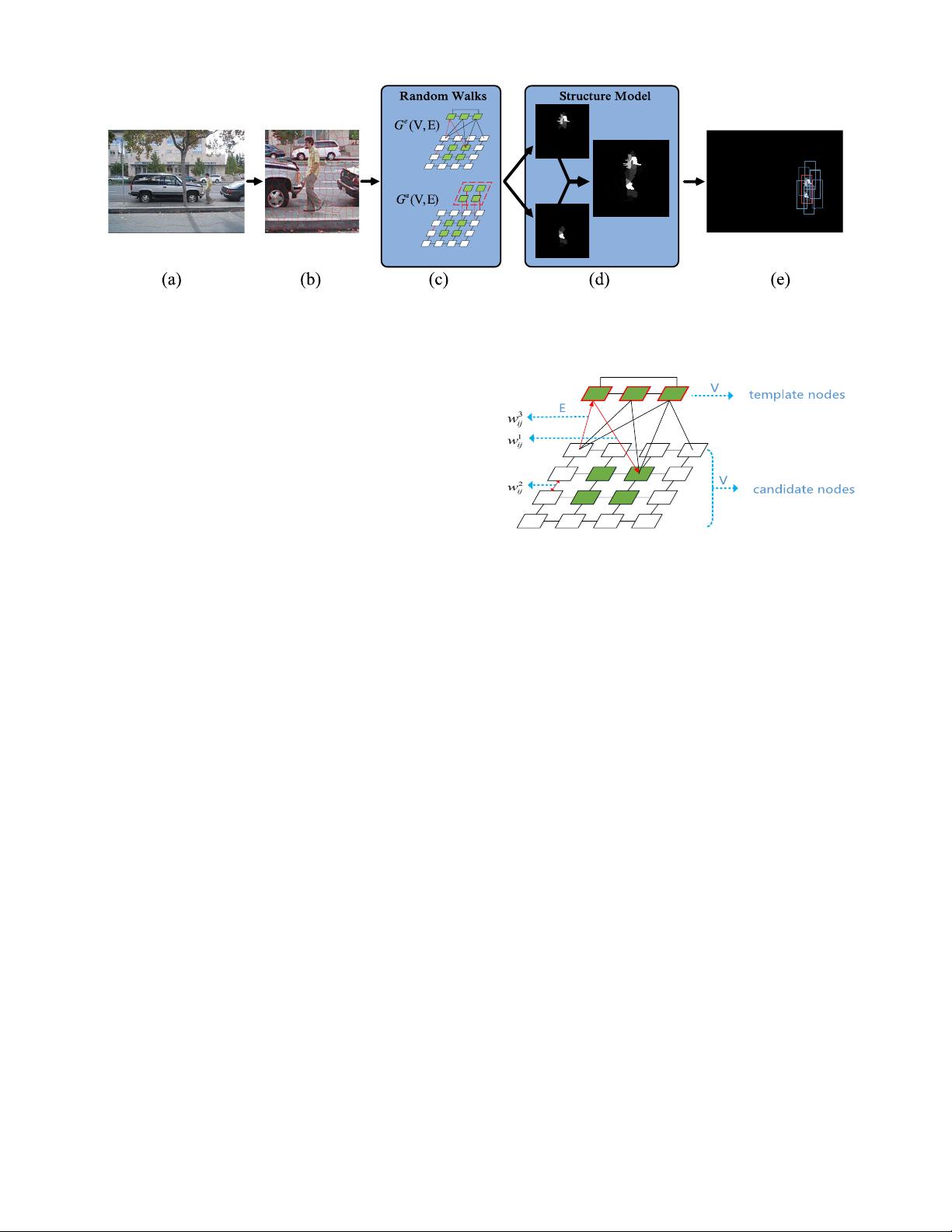
Fig. 2. Pipeline of our method. (a) Input frame at time t. (b) Search region after oversegmentation. (c) Proposed random walks on two graph models.
(d) Proposed structural model. (e) Final confidence map.
states and absorbing states. Given an absorbing chain with
M
a
absorbing states and M
t
transient states, we renumber the
states so that the transient states come first. Then the transition
matrix P has the following canonical form:
P =
QR
0I
(5)
where Q ∈ [0, 1]
M
t
×M
t
contains the transition probability
between any pair of the transient states; R ∈ [0, 1]
M
t
×M
a
con-
tains the probability of reaching any absorbing state from any
transient state; 0 is the M
a
× M
t
zero matrix; and I is the
M
a
×M
a
identity matrix. Starting at any transient state, the ran-
dom walk process on an absorbing Markov chain will always
be absorbed. The fundamental matrix of an absorbing Markov
chain is defined as
N =
(
I − Q
)
−1
(6)
where N = [N
ij
]
M
t
×M
t
; N
ij
denotes the expected number of
times that the process stays in transient state S
j
after starting
from transient state S
i
; and
j
N
ij
is the absorbing time of
node i, i.e., the expected number of times before the chain is
absorbed (into any absorbing state), given that the chain starts
in transient state S
i
. The absorbing time for every transient
state can then be computed by
τ = N1 (7)
where τ = [τ
1
,τ
2
,...,τ
M
t
]
; τ
i
is the absorbing time for
transient state S
i
; 1 is a column vector whose entries are
all ones.
III. T
RACKING VIA RANDOM WALKS ON GRAPH MODELS
The pipeline of our method is illustrated in Fig. 2. When
a new frame arrives, we first segment the search region
1
into n superpixels [see Fig. 2(b)]. Then, we construct two
graph models and perform Markov random walks on them
to compute a confidence map which measures the probabil-
ity of each superpixel belonging to the target area. In order
1
The search region is a square area centered at X
c
t
, the target location of
the last frame. The side length of the search region is set to λ
s
·(S(X
t
))
(1/2)
,
where S(X
t
) represents the area of target area X
t
. The parameter λ
s
controls
the size of this surrounding region and is set to two in experiments.
Fig. 3. Graph model G
e
(V
e
, E
e
) based on ergodic Markov chain. Each
rectangle represents a node. The green candidate nodes and white candidate
nodes denote target nodes and background nodes, respectively. The template
nodes are superpixels in the target region of the first frame.
to make the confidence map more robust, a structural model
is constructed to exploit structural information between object
parts. Finally, the target is located by maximum a posteriori
estimate.
A. Graph Construction
Two kinds of directed graphs, G
e
(V
e
, E
e
) and G
a
(V
a
, E
a
),
are constructed with superpixels as nodes and the relation-
ships between connected nodes as edges. The weight of an
edge indicates how closely related the corresponding two con-
nected nodes are, that is, the random walker will transfer from
node i to j with a high probability if the weight w
ij
of the
directed edge e
ij
is large.
1) Graph Model Based on Ergodic Markov Chain: As
shown in Fig. 3, the nodes of G
e
(V
e
, E
e
) are composed of m
template nodes denoted by T = [T
1
,...,T
m
] and n candidate
nodes denoted by C = [C
1
,...,C
n
], where T
i
and C
j
are the
mean CIE Lab color values of the ith template node and the
jth candidate node, respectively.
2
The template nodes represent
superpixels in the target area of the first frame, while candidate
nodes represent superpixels in the search region of the current
frame. Each template node is connected to the rest nodes in
the graph, including other template nodes and all the candidate
nodes. Each candidate node is connected to its neighboring
candidate nodes and all the template nodes. The weight of the
2
We also use T
i
and C
j
to denote the ith template node and the jth candidate
node in this paper.
剩余11页未读,继续阅读
2010-09-04 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

weixin_38729685
- 粉丝: 4
- 资源: 927
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握压缩文件管理:2工作.zip文件使用指南
- 易语言动态版置入代码技术解析
- C语言编程实现电脑系统测试工具开发
- Wireshark 64位:全面网络协议分析器,支持Unix和Windows
- QtSingleApplication: 确保单一实例运行的高效库
- 深入了解Go语言的解析器组合器PARC
- Apycula包安装与使用指南
- AkerAutoSetup安装包使用指南
- Arduino Due实现VR耳机的设计与编程
- DependencySwizzler: Xamarin iOS 库实现故事板 UIViewControllers 依赖注入
- Apycula包发布说明与下载指南
- 创建可拖动交互式图表界面的ampersand-touch-charts
- CMake项目入门:创建简单的C++项目
- AksharaJaana-*.*.*.*安装包说明与下载
- Arduino天气时钟项目:源代码及DHT22库文件解析
- MediaPlayer_server:控制媒体播放器的高级服务器
