智能车赛道信息捕获:摄像头原理与电路设计详解
需积分: 20 68 浏览量
更新于2024-09-13
1
收藏 349KB DOC 举报
智能车摄像头模块在智能汽车赛道信息采集中起着关键作用,它的工作原理和设计对于确保车辆对赛道的精确识别至关重要。摄像头通常分为彩色和黑白两种类型,但在这个特定场景中,由于赛道仅由黑白色彩构成,所以选择黑白摄像头更为合适,如型号为XB-2001B,分辨率为320*240,能够有效捕捉灰度信息。
摄像头工作原理的核心在于隔行扫描方式。当摄像头扫描图像时,每个像素的灰度信息被转换成相应的电压值,并通过视频信号端输出。这个过程在示波器上表现为连续的电压信号,随着图像灰度的变化而起伏。扫描过程中,行同步脉冲用于标记每一行的结束,而场同步脉冲则是表示视频帧之间的切换标志。由于摄像头每秒扫描50场图像,其中奇场和偶场交替,这为后续的视频信号处理提供了清晰的时间划分。
为了提取有效的视频信号,设计中采用了LM1881集成电路,它能分离出行同步、消隐脉冲和场同步信号。视频信号通过电容连接到LM1881的2脚,作为单片机A/D转换的触发信号,从而实现数据的数字化。同时,摄像头视频信号直接输入LM1881的VIDEO_IN端,并连接到S12的AD转换器口PAD0。行同步信号(HS)和奇偶场同步信号(ODD/EVEN)由LM1881的引脚1提供,这些同步信号被用来确保单片机正确地捕获图像帧。
图像采样电路设计的目标是高效地从摄像头获取信息,同时减少不必要的复杂性。通过这样的设计,系统能够专注于提取赛道的边缘信息,这对于自动驾驶和赛道跟踪应用来说极其重要。智能车摄像头模块是一个集成传感器技术与信号处理能力的关键组件,它的性能直接影响到智能汽车对周围环境的感知和反应能力。
智能车摄像头模块
智能汽车 模糊控制
摄像头采集赛道黑线信息是本系统赛道信息获取的主要途径,本章将从摄像头工作原
理、图像采样电路设计、和采样程序流程图三个方面进行介绍。
8.1 摄像头工作原理
摄像头常分为彩色和黑白两种摄像头,主要工作原理是:按一定的分辨率,
以隔行扫描的方式采样图像上的点,当扫描到某点时,就通过图像传感芯片将该点处图像
的灰度转换成与灰度成一一对应关系的电压值,然后将此电压值通过视频信号端输出。
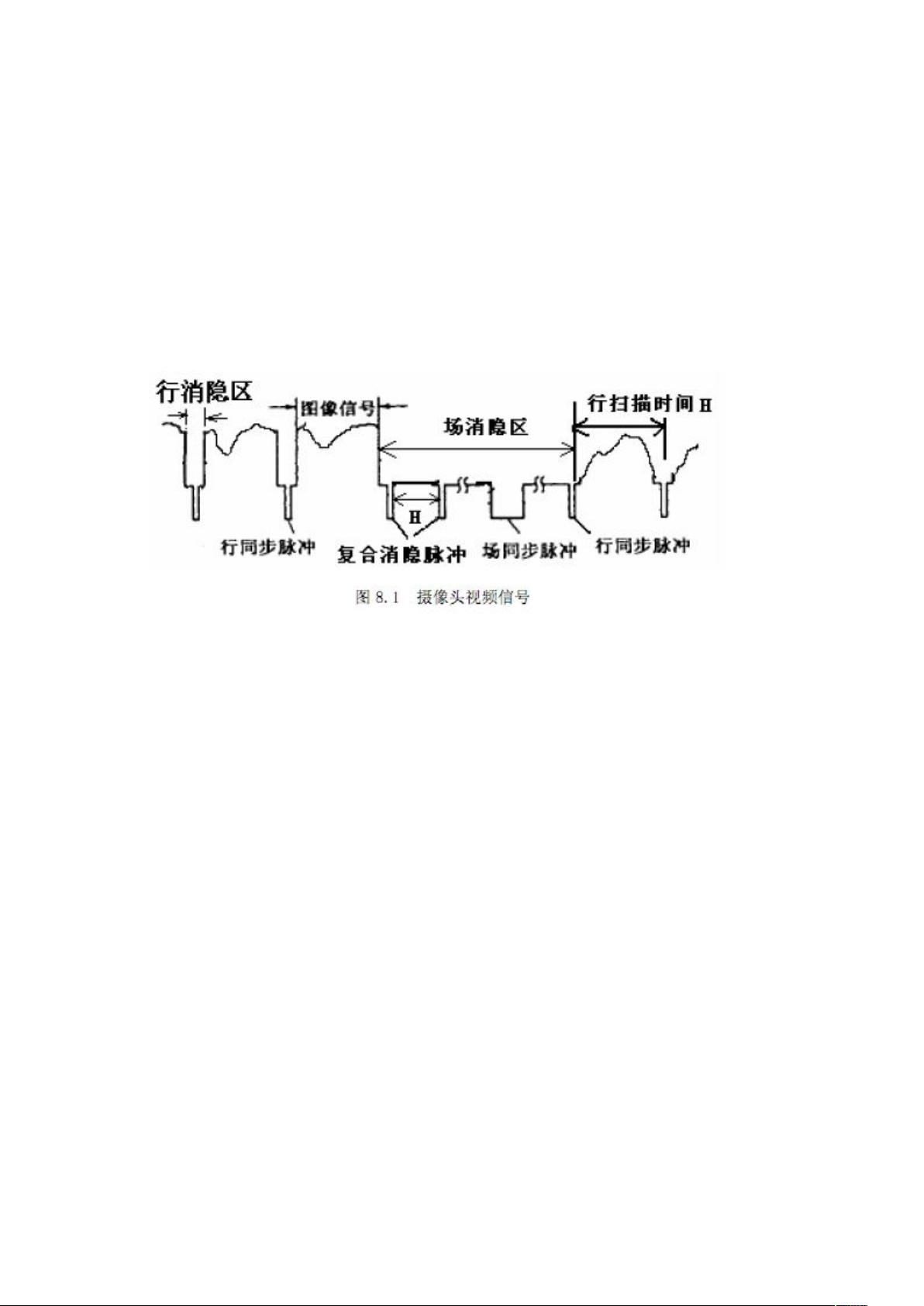
在示波器上观察可知摄像头信号如图 8.1 所示。摄像头连续地扫描图像上的
一行,就输出一段连续的电压视频信号,该电压信号的高低起伏正反映了该行图像的灰度
变化情况。当扫描完一行,视频信号端就输出一低于最低视频信号电压的电平(如
0.3V),并保持一段时间。这样相当于,紧接着每行图像对应的电压信号之后会有一个电
压“凹槽”,此“凹槽”叫做行同步脉冲,它是扫描换行的标志。然后,跳过一行后(因为摄像
头是隔行扫描的方式),开始扫描新的一行,如此下去,直到扫描完该场的视频信号,接
着就会出现一段场消隐区。此区中有若干个复合消隐脉冲(简称消隐脉冲),在这些消隐
脉冲中,有个脉冲,它远宽于(即持续时间长于)其他的消隐脉冲,该消隐脉冲又称为场
同步脉冲,它是扫描换场的标志。场同步脉冲标志着新的一场的到来,不过,场消隐区恰
好跨在上一场的结尾部分和下一场的开始部分,得等场消隐区过去,下一场的视频信号才
真正到来。摄像头每秒扫描 25
幅图像,每幅又分奇、偶两场,先奇场后偶场,故每秒扫描 50 场图像。奇场时只扫描图像
中的奇数行,偶场时则只扫描偶数行。
8.2 图像采样电路设计
在本次比赛中赛道仅由黑白两色组成,为了获得赛道特征,只需提取探测画 面的灰度
信息,而不必提取其色彩信息,所以本设计中采用黑白摄像头。型号为:
XB-2001B,分辨率为 320*240。为了有效地获取摄像头的视频信号,我们采用 LM1881 提
取行同步脉冲,消隐脉冲和场同步脉冲,电路原理图 8.2 所示。将视频信号通过一个电容
接至 LM1881 的 2 脚,即可得到控制单片机进行 A/D 采样的控制信号行同步 HS 与奇偶场
下载后可阅读完整内容,剩余4页未读,立即下载
2013-03-08 上传
2009-04-13 上传
点击了解资源详情
2022-07-14 上传
2019-03-20 上传
132 浏览量
2013-04-25 上传
2021-10-04 上传
2011-03-11 上传

thanray
- 粉丝: 3
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java集合ArrayList实现字符串管理及效果展示
- 实现2D3D相机拾取射线的关键技术
- LiveLy-公寓管理门户:创新体验与技术实现
- 易语言打造的快捷禁止程序运行小工具
- Microgateway核心:实现配置和插件的主端口转发
- 掌握Java基本操作:增删查改入门代码详解
- Apache Tomcat 7.0.109 Windows版下载指南
- Qt实现文件系统浏览器界面设计与功能开发
- ReactJS新手实验:搭建与运行教程
- 探索生成艺术:几个月创意Processing实验
- Django框架下Cisco IOx平台实战开发案例源码解析
- 在Linux环境下配置Java版VTK开发环境
- 29街网上城市公司网站系统v1.0:企业建站全面解决方案
- WordPress CMB2插件的Suggest字段类型使用教程
- TCP协议实现的Java桌面聊天客户端应用
- ANR-WatchDog: 检测Android应用无响应并报告异常
