AGV小车结构设计与动力学建模分析
需积分: 10 154 浏览量
更新于2024-06-30
收藏 713KB DOC 举报
"2. AGV系统结构设计
AGV(Automated Guided Vehicle)系统设计的核心在于确保车辆的稳定性和可控性。本设计中,AGV小车采用前后轮独立驱动的架构,这种设计能提供更好的负载能力和行驶平稳性。后轮通过步进电机驱动,通过齿轮传动传递动力,确保车辆有足够的驱动力。前轮则由伺服电机控制,通过直推轴和横轴的组合实现精确的转向,这种设计使得AGV能够灵活地在狭小的空间内移动。
2.1 AGV系统结构详解
如图2.1所示,AGV小车的结构包括:1) 蓄电池组作为电源;2) 伺服交流电动机负责驱动和转向;3) 激光扫描仪用于环境感知和导航;4) 车载控制器处理传感器数据并控制车辆行为;5) 无线通讯装置保证车辆与地面站的通信;6) 另一个伺服交流电动机辅助驱动或转向;7) 减速器提高电机扭矩并降低转速;8) 驱动车轮与柔性连轴器相连,保证两轮同步性。
2.2 AGV动力学建模
AGV动力学建模是理解车辆动态性能的关键。传统的控制模型基于运动学,但基于动力学的模型可以更深入地分析电机输入与车轮转速之间的非线性耦合关系,这对于优化机械结构设计、路径规划和控制策略至关重要。在低速环境下,AGV的动力学模型通常简化为二维,忽略了可能的“上跳”现象。模型的建立以后轮电机驱动齿轮传递扭矩、前轮电机直接控制轴转动的AGV为例,涵盖了车体、驱动装置、转向装置等多个子系统。
2.2.1 动力学模型的应用
动力学模型可用于分析车辆在各种工况下的稳定性,如加速度限制下的行驶表现。控制器通过监测和调整电机输入,确保车辆在复杂环境中的稳定行驶。此外,车上控制器扮演着重要角色,负责接收地面站指令,监控车辆状态,如手动控制、安全防护、电池电量、转向限制、制动状态以及灯光控制等。
2.2.2 AGV系统的组件
AGV的组成部分还包括:精确停车装置,确保车辆准确停靠;通信装置,实现与地面站的双向通信;信息采样子系统,收集环境信息;超声探障保护子系统,防止碰撞;移载装置,用于装载和卸载货物;车体方位计算子系统,实时更新车辆位置。
总结来说,AGV系统结构设计和动力学建模是实现自动化运输的关键技术,它们结合了机械工程、电子工程和控制理论,以实现高效、安全的自主导航和操作。通过对每个子系统的精确控制和整体动力学模型的深入理解,AGV能够在各种环境中执行复杂的物流任务。"
5
R RY RY RY
M v F F= - +
(2.25)
RX R R SR RY R RF
J w M M F R M= - - -
&
(2.26)
RZ RZ RZ RZ
J w M M= -
&
(2.27)
上述各式中,有关物理量的具体意义同对左后轮的说明类似,这里就不做过多说明
了。由于 AGV 速度和加速度均较小的原因,轮子的侧滑阻力很大,假设其中的
0��
RXLX
Vv
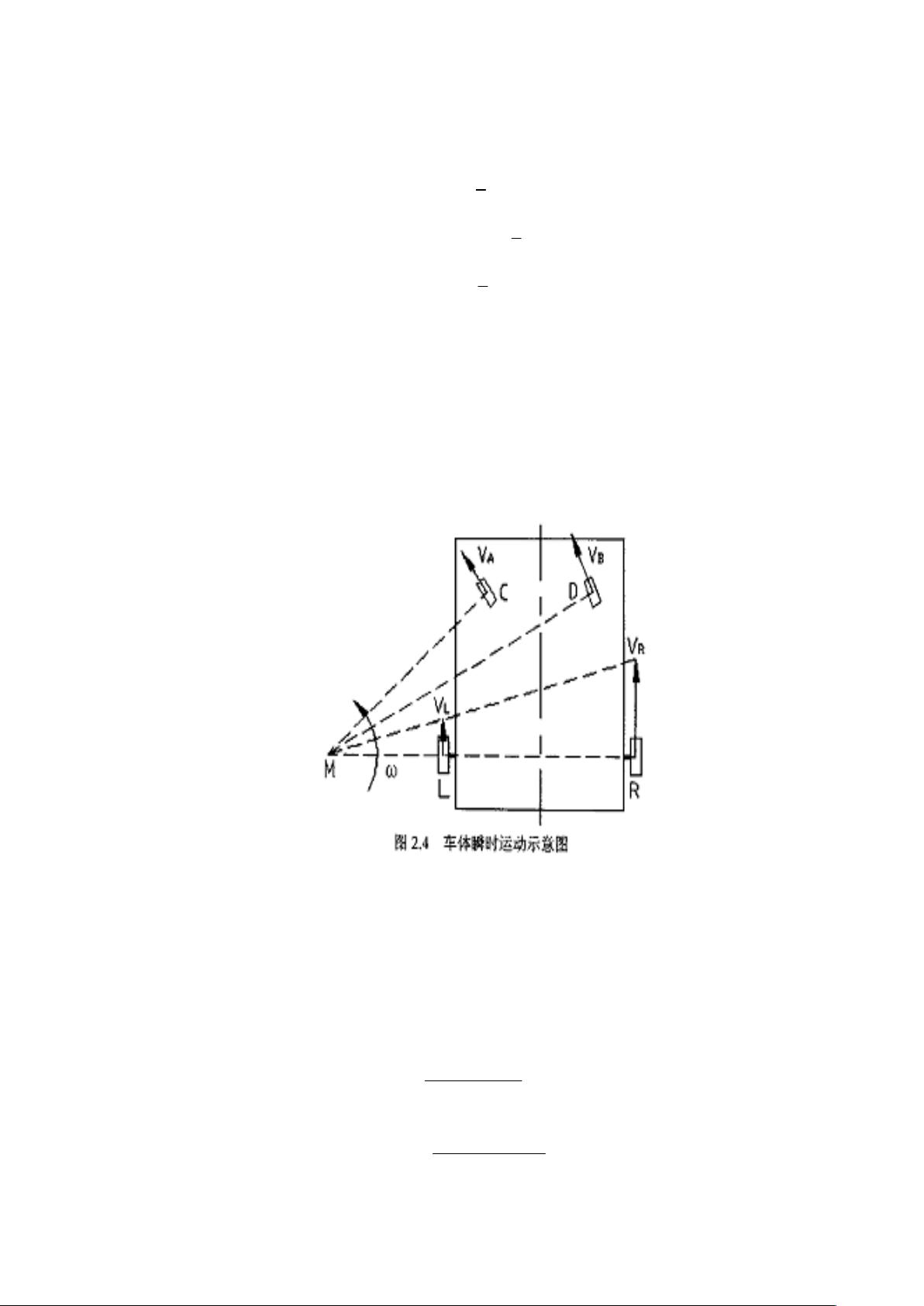
。这样看来车体将以位于左右轮轴线上的某一点
M
为瞬时速度中心,以
角速度 w 转动,我们根据所了解的知识,我们不难看出一点,通过左右轮转动计算,根
据下图 2.4 所示:
即:
LX LV
v wv= -
&
(2.28)
R Y R Y
v w v= -
&
(2.29)
将以上的 2 个式子带入(2.14),(2.18)中可以看到
1 2
R Y L Y
v v
w
a a
-
=
+
(2.30)
1 2
R Y L Y
v v
w
a a
-
=
+
&
&
(2.3.1)

剩余32页未读,继续阅读
2021-12-18 上传
2021-09-18 上传
2024-02-25 上传
2022-07-14 上传
2024-02-26 上传
2024-02-26 上传

神奇的小强
- 粉丝: 85
- 资源: 38
 我的内容管理
展开
我的内容管理
展开







最新资源
- WordPress作为新闻管理面板的实现指南
- NPC_Generator:使用Ruby打造的游戏角色生成器
- MATLAB实现变邻域搜索算法源码解析
- 探索C++并行编程:使用INTEL TBB的项目实践
- 玫枫跟打器:网页版五笔打字工具,提升macOS打字效率
- 萨尔塔·阿萨尔·希塔斯:SATINDER项目解析
- 掌握变邻域搜索算法:MATLAB代码实践
- saaraansh: 简化法律文档,打破语言障碍的智能应用
- 探索牛角交友盲盒系统:PHP开源交友平台的新选择
- 探索Nullfactory-SSRSExtensions: 强化SQL Server报告服务
- Lotide:一套JavaScript实用工具库的深度解析
- 利用Aurelia 2脚手架搭建新项目的快速指南
- 变邻域搜索算法Matlab实现教程
- 实战指南:构建高效ES+Redis+MySQL架构解决方案
- GitHub Pages入门模板快速启动指南
- NeonClock遗产版:包名更迭与应用更新
