六脚爬虫机器人设计与控制程序解析
版权申诉
198 浏览量
更新于2024-07-05
收藏 2.71MB PDF 举报
"六脚爬虫机器人机械结构设计和控制系统搭建整理.pdf"
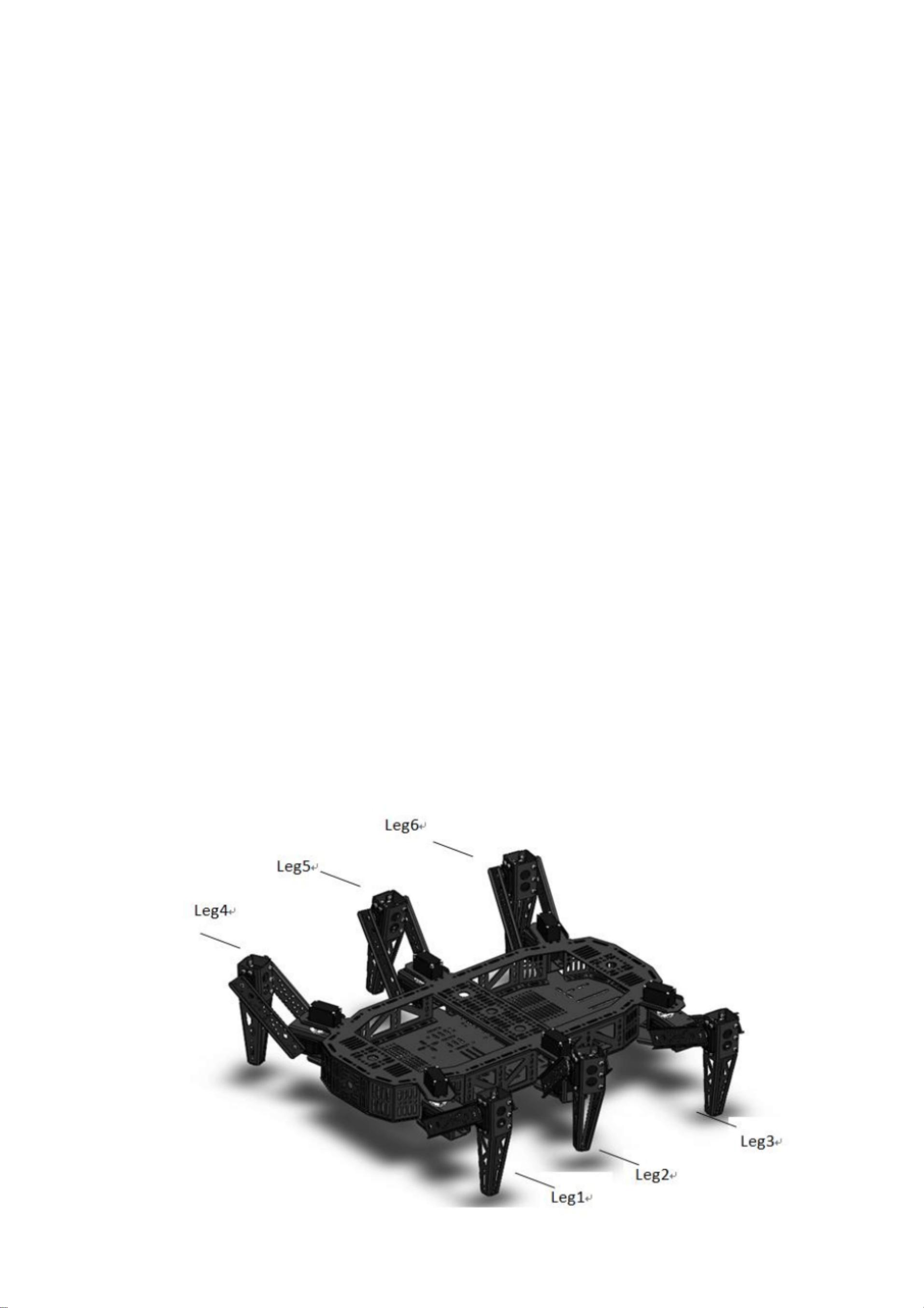
这篇文档详细阐述了六脚爬虫机器人从机械结构设计到控制系统搭建的全过程。机械结构部分,该机器人采用了对称式设计,这种设计模式使得结构简洁而有效。对称性确保了机器人的稳定性和平衡,有助于六只脚的协调运动。每只脚配备3个舵机,总共18个舵机,赋予了机器人较高的自由度,使其能够灵活地进行各种动作。
舵机控制器在机器人中扮演了关键角色,它们负责驱动并精确控制每个舵机的角度,从而实现机器人的步态运动。步态设计是控制程序的核心,通过C语言编程实现,可以设定和调整机器人的行走模式,使其能够在不同环境下适应性地移动。
传感器的应用是控制系统的另一大亮点。机器人配备了多种传感器,如距离传感器、光照传感器等,这些传感器能感知外界环境,收集数据。当机器人接收到传感器传递的信息后,控制器会解析并处理这些数据,根据外界条件调整机器人的运动策略,实现对外界环境的响应。
关键词如“对称式结构”强调了设计原则,舵机控制器是执行机构的核心,步态设计关乎机器人的动态行为,而传感器则是机器人与环境交互的关键。通过这些关键词,我们可以了解到该设计的重点在于创建一个能够自主感知和适应环境的智能六脚爬虫机器人。
文档的目录结构表明,除了摘要和引言,还包括了机械结构的详细设计、舵机控制器的工作原理、步态编程的实现方法、传感器的应用实例,以及可能的数据处理和控制逻辑等内容。这样的结构设计旨在提供全面的理论和技术指导,帮助读者理解并构建类似的六脚爬虫机器人。
这份资料对于学习机器人设计,尤其是对称式多足机器人控制技术的研究者或爱好者来说,是一份宝贵的参考资料。它涵盖了从硬件构建到软件控制的各个环节,深入浅出地介绍了如何将理论知识转化为实际操作,有助于提升读者在机器人领域的实践能力。

- 5 -
1.4 本课题的研究内容
六脚机器人基本结构的设计, 首先使之能够实现三脚步态、 四脚步态、 波动
步态等,以满足行走要求;然后,能够感知外界环境的变化,实现避障报警等功
能;最后,实现对机器人的远距离控制。具体要求为:
设计机器人机械结构,使其可以完成前进,后退,左转,右转,侧移,扭动
身躯等简单动作;可以完成抬脚,简单舞蹈等动作;
1、编写机器人各种基本动作的软件代码,使其能完成以上动作;
2、机器人可以接受电脑无线控制,编写相应无线控制程序;
3、机器人可感知外界环境,编写相应传感器处理程序;
4、对所有程序进行综合处理,协调各程序之间的关系。
剩余49页未读,继续阅读
2023-07-13 上传
点击了解资源详情
2023-07-13 上传
2023-07-15 上传
点击了解资源详情
点击了解资源详情

hwx18537729388
- 粉丝: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- Windows Socket实现局域网语音实时传输技术
- SQL基础教程:从入门到精通
- 《Java编程思想》第三版——引领你进入Java的世界
- C/C++面试深度解析:常见程序设计面试题
- Windows内核调试器原理与WinDBG深入解析
- ArcGIS Server 9.2安装步骤与配置指南
- DWR中文教程:入门与实践
- C/C++程序员面试题深度解析:从基础到精髓
- SQLServer2005基础教程:清华大学出版社详解
- NiosII程序烧录Flash详细步骤
- Windows Sockets编程指南:网络接口详解
- 深入解析Tomcat工作原理与配置实战
- 刘主任试用永中集成Office:从困惑到精通
- Sun Studio 11 dbx 调试程序参考手册
- VI编辑器使用技巧和帮助文档
- 地理信息系统设计指南:Esri关于世界建模的经典著作
