压电致动微位移台摩擦控制:扩展的无平行Prandtl–Ishlinskii磁滞补偿器
184 浏览量
更新于2024-08-26
收藏 1.25MB PDF 举报
"这篇研究论文探讨了一种使用扩展的非平行Prandtl-Ishlinskii磁滞补偿器的压电致动微位移台的前馈摩擦级比例积分-导数(PID)反馈控制方法,旨在提升微操作任务中的定位精度。论文中介绍了一个配备有位移放大器的压电柔性二自由度微操纵器,该装置在大工作空间和高运动精度方面具有优势。为了改善微操纵器的实际定位性能,作者提出了一个综合方案,包括集成反向前馈补偿器、反馈控制器和摩擦级PID控制器,以消除压电致动微位移台的不利共振模式,从而满足系统的精度要求。"
本文的重点在于解决压电致动微位移台在执行精密微操作时面临的摩擦力问题和共振问题。压电致动器因其快速响应和高分辨率而在微纳米定位领域广泛应用,但其工作过程中存在的摩擦和共振现象会影响定位精度。
首先,扩展的非平行Prandtl-Ishlinskii磁滞模型被用来补偿压电致动器的非线性磁滞效应。Prandtl-Ishlinskii模型是一种经典的描述材料滞回特性的数学模型,扩展的版本则更准确地模拟了实际压电材料的复杂行为,尤其是考虑了非平行效应,即磁滞曲线不完全对称的情况,这有助于更精确地预测和补偿由于摩擦引起的定位误差。
接着,文章提出了一种摩擦级PID控制器,这种控制器不仅包含传统的PID元素,还引入了对摩擦效应的考虑,以适应压电致动器在不同状态下的摩擦变化。PID控制器通过比例、积分和微分三部分来调节系统的响应,而摩擦级的引入使得控制器能够更好地应对因摩擦引起的动态变化,提高控制性能。
同时,论文中还包括了一个集成反向前馈补偿器,它的作用是提前预测并抵消由摩擦和非线性动态效应导致的误差,以减少系统对这些不确定性因素的敏感性。
最后,反馈控制器结合前馈控制策略,形成一个全面的控制方案,能够实时监测和调整压电致动微位移台的运动状态,进一步抑制系统的共振现象,确保微位移台的稳定性和精度。
这篇研究论文提供了一种创新的控制策略,通过深入理解和补偿压电致动器的非线性特性,尤其是摩擦和磁滞效应,以实现压电微位移台在精密微操作中的高精度定位。这种方法对于提高微纳米技术领域的设备性能和应用范围具有重要意义。
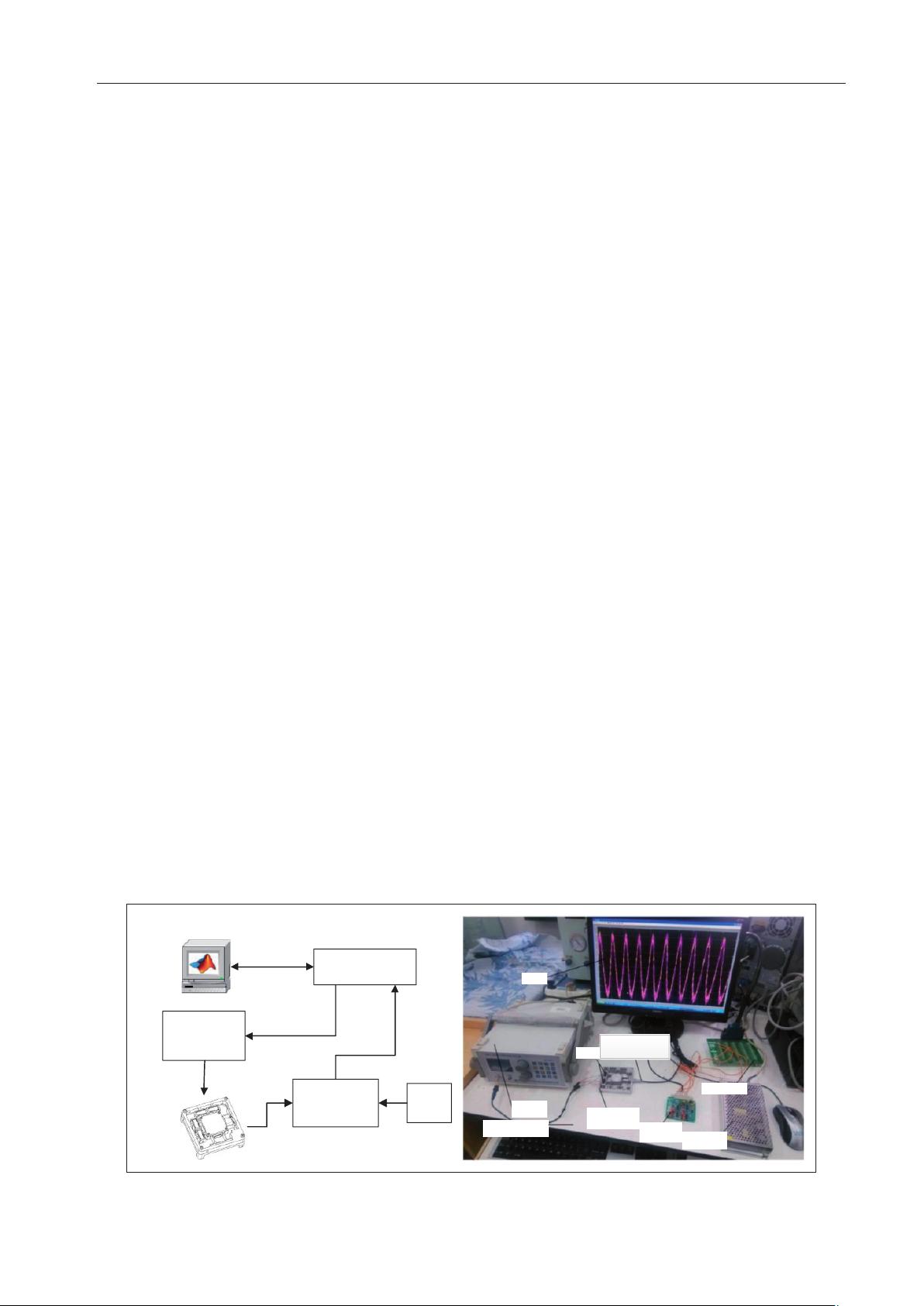
Experimental setup
The control flow and experimental setup is graphically
shown in Figure 2. According to the consideration of
the large-workspace requirement, the driver power
supply (HPV-1C0300A0300 from Suzhou MAT,
Inc.) and four PZTs (SZBS150/5 5/20 with open-
loop travel of 20 mm from Suzhou MAT, Inc.) are
selected to drive the microposition stage. To accur-
ately obtain the output displacement of the platform
centric at two axes, two high-resolution capacitance
displacement sensors (MA-0.5, from BJZD, Inc.) and
a data acquisition card (PCI-6221, from NI, Inc.) are
adopted in the research. To minimize the external
interference, all the units are mounted onto a high-
performance vibration isolation table.
EUPI hysteresis compensator
The hysteresis phenomenon of piezoactuated
microposition stage
First, a periodic sine signal with time-varying amplitude
and a constant rate (u ¼ absðcosð0:1tÞ1Þe
0:004t
)
and a triangular wave (u ¼ absðsawtoothð0:04t,
0:5Þ1Þe
0:004tðÞ
)areappliedtothePZTsbytheamp-
lifier power supply (HPV-1C0300A0300). Acquiring the
input signal and the output displacement with the fixed
sampling time (0.001 s) by the experimental setup, the
related results are shown in Figure 3. The hysteresis
nonlinearity of this system is obvious (the maximum is
approximately 21.8%). Moreover, the microposition
stage cannot easily satisfy the cell injection and IC man-
ufacturing precision requirements with large nonlinear
characteri stics.
Before the design of the controller, the dynamics of
the microposition stage are studied. In general, a
Hammerstein-like model can describe the dynamic
behavior of the stage.
32–34
Figure 4 schematically
shows the Hammerstein-like model, where H
represents the hysteresis nonlinearity, and G repre-
sents the stage linear model.
EUPI model and compensator
The inherent hysteresis effect of the PEAs will intro-
duce nonlinearity into the microposition system;
this nonlinearity should be eliminated to guarantee
the precision positioning accuracy. In recent years,
many research groups have focused on compensating
the hysteresis nonlinearity by depending on the
inverted model that will closely describe the hysteresis
behavior. In the above models, the EUPI method is a
new hysteresis compensation algorithm and is derived
from the PI model, which can be found in our recent
study.
15
The hysteresis operator mathematic form of EUPI
can be described as follows
F
r,
j
½uðtÞ¼max fuðtÞr, minf
j
uðtÞþrðÞ, F
r,
j
ðt
Þgg
j
4 0, r50 t
¼ lim
!0
ðt Þ
ð1Þ
where F
r,
j
½uðtÞ is the hysteresis operator output; u(t)
denotes the drive signal at time t; r is the dead zone,
and
j
is the jth angle assigned to tilt the descending
edge, including
j
5 1,
j
¼ 1 and
j
5 1.
And three parts of the complex hysteresis nonlinear-
ity effect can be considered, i.e. symmetric hysteresis,
asymmetric hysteresis, and memory-less polynomial.
The model is expressed as follows
H½uðtÞ¼
CPI
½uðtÞþ
UPI
½uðtÞþP½uðtÞð2Þ
where
CPI
u½ðtÞ and
UPI
½uðtÞ are the symmetric hys-
teresis part and the asymmetric hysteresis part; P[u](k)
PC
PCI 6221
DAQ Card
PZT Driving
Power
Capacitance
displacement
sensors
Micro
position
stage
24V
Power
Driver
Power
PZT
Micro
position stage
Capacitance sensors
NI PCI6221
24V DC
Power
Condition
circuit
PC
Vibration isolation
table
Figure 2. The schematic diagram of the experimental setup.
Hao et al. 2869
剩余11页未读,继续阅读
190 浏览量
408 浏览量
222 浏览量
111 浏览量
2021-03-24 上传
408 浏览量
222 浏览量
191 浏览量
138 浏览量

weixin_38675777
- 粉丝: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- FIRST Tech Challenge 2020-2021赛季SDK发布
- 掌握短语法编写高效Redux Reducers技巧
- Webpack插件生成Html5清单Appcache文件方法
- 商务英语专业简历模板下载:求职参考指南
- LeetCode算法问题分析与解决
- 开源Active Directory用户管理器实现账户同步
- SCSS开发工具WOODIES简介与应用
- 创意简历模板下载:助你面试成功
- 第4章 PHP插件开发实战入门教程
- 《OpenGL编程指南(第八版)》:权威OpenGL红宝书
- 掌握SVG与CSS动画的技巧
- 导游创意简历模板免费下载
- 掌握OmniStack-11:打造Web应用与React Native开发实战
- 雄迈LocalSDK 2012-05-11版本二次开发指南
- React项目开发入门与构建指南
- 创新玩具级工具:HTML转虚拟DOM编译器
