Linux设备驱动互斥机制选择与实现
需积分: 9 90 浏览量
更新于2024-08-11
收藏 499KB PDF 举报
"Linux设备驱动中的互斥机制 (2009年)"
在Linux操作系统中,设备驱动程序是操作系统内核与硬件设备之间的桥梁,负责管理硬件设备并提供服务给上层应用程序。随着多处理器系统的发展,设备驱动程序的并发访问变得越来越普遍,这引入了同步和互斥的问题。本文主要探讨了Linux设备驱动中的互斥机制,以及如何根据不同的并发场景选择最合适的同步策略。
首先,Linux设备驱动架构通常包括字符设备驱动、块设备驱动以及网络设备驱动等类型。每个驱动都需要处理来自多个任务或线程的并发请求,因此必须实现一种机制来确保对设备资源的独占访问,防止数据不一致和竞态条件的发生。
在设备驱动的并发控制中,有几种常见的互斥机制:
1. **中断屏蔽**:在需要独占设备的代码段中,通过屏蔽中断来避免中断处理程序访问同一资源。这种方式简单有效,但可能导致中断延迟,影响系统响应时间。
2. **原子操作**:如原子读写操作,它们在执行过程中不会被中断,保证了操作的完整性。原子操作适用于简单的同步场景,但在复杂情况下可能不够用。
3. **信号量(Semaphore)**:信号量是一个计数器,可以用于保护多个资源。当计数器为零时,其他任务将被阻塞直到计数器非零。信号量分为互斥信号量(只能被一个任务持有)和共享信号量(可以被多个任务持有),适合于多资源的同步。
4. **自旋锁(Spinlock)**:自旋锁是一种等待方式,当锁被占用时,尝试获取锁的任务会持续检查锁的状态,直到锁变为可用。自旋锁适用于短时间的锁定,因为它不涉及上下文切换,但长时间持有自旋锁会导致CPU资源浪费。
选择互斥机制时,需要考虑以下因素:资源的访问频率、持有锁的时间长度、系统的实时性要求以及处理器数量等。例如,对于快速访问且持有时间短的资源,自旋锁可能是最佳选择;而对于可能会导致任务阻塞的长时操作,信号量可能更合适。
文章还简要介绍了这些机制的使用方法,强调在使用时应注意避免死锁和优先级反转问题。死锁发生在两个或更多任务相互等待对方释放资源而无法继续进行的情况;优先级反转则是一个高优先级任务被低优先级任务阻塞,降低了系统的响应能力。为解决这些问题,可以采用死锁预防算法、优先级继承和优先级天花板协议等策略。
Linux设备驱动中的互斥机制选择和使用是一门学问,需要根据具体的设备特性和系统需求进行细致的设计和优化。理解这些机制的工作原理及其应用场景,有助于编写出高效、可靠的设备驱动程序。
书书书
前沿技术
!"#$% 设备驱动中的互斥机制
收稿日期!!""#$"%$!&'
张'毅!赵子顾
!重庆邮电大学 移动通信重点实验室"重庆 (""")&#
摘'要!首先介绍 *+,-.的设备驱动架构!引入设备驱动的并发控制机制!然后通过比较几种互斥机制的优缺点!重
点详述如何针对不同互斥场景选择最佳的互斥机制!最后简述了几种机制的使用方法及使用时要注意的问题"
关键词!中断屏蔽#原子操作#信号量#自旋锁#临界资源
&%'($)"*#+,'-.#")+ "#!"#$% /,0"',/1"0,1
/01234+" /015/+$6-
!789*:;<=:><=9<?@<;+A8B<CC-,+D:>+<,EF8DG,<A<69" BG<,6H+,6I,+J8=E+>9<?K<E>E:,L F8A8D<CC-,+D:>+<,E" BG<,6H+,6(""")&" KMNMBG+,:#
23)41.'4$FG+EO:O8=L+ED-EE8E>G8E>=-D>-=8<?*+,-.L8J+D8L=+J8=MFG8," >G8D<,D-==8,D9D<,>=<AC8DG:,+EC <?L8J+D8
L=+J8=P:E+,>=<L-D8LMFG=<-6G >G8D<CO:=+E<, <?>G8:LJ:,>:68E:,L L+E:LJ:,>:68E<?E<C8Q+,LE<?8.DA-E+<, C8DG:,+EC"
>G8O:O8=8.OA:+,8LEG<P><DG<<E8>G8;8E>8.DA-E+<, C8DG:,+EC:DD<=L+,6><L+??8=8,>ED8,8MR+,:AA9" >G8O:O8=O=<O<E8E
>G8<O8=:>+<, C8>G<L :,L >G8+,E>=-D>+<,M
5,6 7*1/)$C:EQ +,>8==-O>% :><C+D<O8=:>+<,% E8C:OG<=8% E+,A<DQ% D=+>+D:A=8E<-=D8E
89引9言
*+,-.系统的内存空间分为用户空间与内核空
间
"
设备驱动程序是内核的一部分
"
运行在内核模
式"设备驱动程序为内核提供了一个 ST5接口"用户
使用这个接口实现对设备的操作
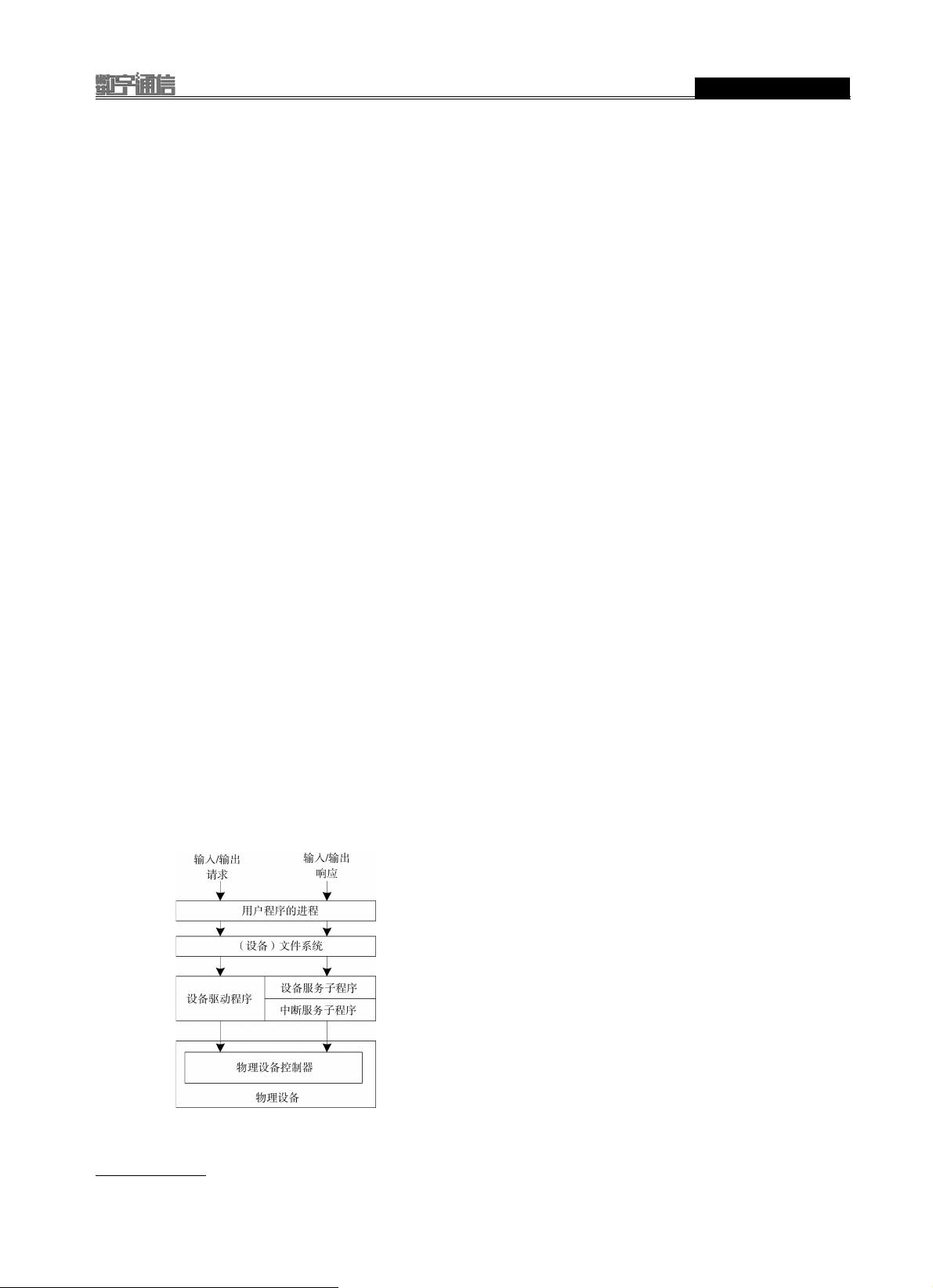
& 图 U 显示了典型
的
*+,-.设备驱动层次结构&
图
:9!"#$%
设备驱动层次结构
*+,-.设备驱动程序包含中断处理程序和设备服
务子程序
! 部分& 设备驱动程序屏蔽了设备的特殊
性
"
使用户可以像对待普通文件一样操作设备
'U(
&
设备控制器一般有
!
种系统服务方式
$
查询和
中断
"
由于查询方式低下
"
大多设备采用中断方式
"
然而不管是查询方式还是中断方式对设备进行访
问"都有可能是多进程并发访问"这样就产生了临
界资源
!
设备
)
变量
)
缓冲区
#
的竞态
'!(
& *+,-.
提供
了驱动的并发控制机制"但不同的互斥情形所使用
的互斥手段不同"正确选择不同互斥情形的最佳互
斥机制"能大大节约系统资源"提高系统效率&
:9解决互斥问题的机制
在 *+,-.驱动层即内核态下解决互斥问题的机
制有
$
中断屏蔽
)
原子操作
)
信号量和自旋锁及其他
衍生锁&
下面将详细介绍这几种互斥机制
&
:;:9中断屏蔽
在单 BKI范围内避免竞态的简单方法就是进
入临界区之前屏蔽系统的中断"BKI一般都具有屏
蔽中断和打开中断的功能"这样可以保证正在执行
*U*
下载后可阅读完整内容,剩余3页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-09-06 上传
2013-01-18 上传
2017-05-26 上传
点击了解资源详情
点击了解资源详情

weixin_38698149
- 粉丝: 5
- 资源: 935
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular实现MarcHayek简历展示应用教程
- Crossbow Spot最新更新 - 获取Chrome扩展新闻
- 量子管道网络优化与Python实现
- Debian系统中APT缓存维护工具的使用方法与实践
- Python模块AccessControl的Windows64位安装文件介绍
- 掌握最新*** Fisher资讯,使用Google Chrome扩展
- Ember应用程序开发流程与环境配置指南
- EZPCOpenSDK_v5.1.2_build***版本更新详情
- Postcode-Finder:利用JavaScript和Google Geocode API实现
- AWS商业交易监控器:航线行为分析与营销策略制定
- AccessControl-4.0b6压缩包详细使用教程
- Python编程实践与技巧汇总
- 使用Sikuli和Python打造颜色求解器项目
- .Net基础视频教程:掌握GDI绘图技术
- 深入理解数据结构与JavaScript实践项目
- 双子座在线裁判系统:提高编程竞赛效率
