SURF特征检测与描述技术详解
需积分: 10 139 浏览量
更新于2024-07-16
收藏 1.82MB PDF 举报
"这篇资源是关于Speeded-Up Robust Features (SURF)的论文,详细介绍了这一特征检测与描述方法。SURF是一种快速、鲁棒且尺度和旋转不变的特征检测和描述算子,旨在在保持高重复性、独特性和稳健性的同时,提高计算速度。论文作者包括Herbert Baya、Andreas Essa等人,发表于2007年。"
在计算机视觉领域,特征检测和描述是图像处理和模式识别的核心部分。SURF(Speeded-Up Robust Features)作为一种高效算法,针对传统的特征提取方法进行了优化,特别是在速度和性能上有了显著提升。该算法主要由以下几个关键步骤组成:
1. **尺度空间极值检测**:SURF使用基于Hessian矩阵的检测器来寻找图像中的兴趣点。Hessian矩阵能捕捉图像的二阶导数信息,帮助确定图像局部的曲率,从而找到潜在的特征点。这种方法使得特征检测对尺度变化具有不变性。
2. **加速计算**:通过使用积分图像(Integral Image),SURF能够快速执行图像卷积操作,大大提高了计算效率。积分图像是一种预处理技术,可以有效地计算图像任意矩形区域的像素和,为特征检测提供快速路径。
3. **特征描述**:SURF采用了一种基于直方图的描述符,称为加速稳定特征向量(ASIFT)。这个描述符对特征点周围的图像块进行采样,并根据梯度方向和强度构建方向直方图,形成一个具有旋转不变性的描述子。这种方法确保了特征描述的鲁棒性,即使在光照变化和轻微几何变形下也能有效匹配。
4. **匹配步骤**:SURF通过汉明距离或其他相似度度量方法比较特征描述符,找到最佳匹配。这种匹配过程同样被优化以提高速度,确保在大规模特征数据库中快速查找。
5. **实验与评估**:论文详细探讨了各种参数对检测和描述效果的影响,以及与其他已知方法如SIFT(Scale-Invariant Feature Transform)的对比。实验结果证明,尽管速度更快,但SURF在重复性、独特性和稳健性方面并不逊色于SIFT。
SURF是计算机视觉中一种重要的特征提取算法,它通过优化计算过程和设计有效的特征描述,实现了性能与速度的平衡。在图像匹配、物体识别和三维重建等应用中,SURF都显示出了优秀的性能。这篇论文对于理解并实现这一技术具有很高的参考价值。
using integral images. The calculation time therefore is
independent of the filter size. As shown in Section 5
and Fig. 3, the performance is comparable or better
than with the discretised and cropped Gaussians.
The 9 9 box filters in Fig. 2 are approximations of a
Gaussian with r ¼ 1:2 and represent the lowest scale (i.e.
highest spatial resolution) for co mputing the blob response
maps. We will denote them by D
xx
, D
yy
, and D
xy
. The
weights applied to the rectangular regions are kept simple
for computational efficiency. This yields
detðH
approx
Þ¼D
xx
D
yy
ðwD
xy
Þ
2
: ð3Þ
The relative weight w of the filter responses is used to bal-
ance the expression for the Hessian’s determinant. This is
needed for the energy conservation between the Gaussian
kernels and the approximated Gaussian kernels,
w ¼
j L
xy
ð1:2Þj
F
j D
yy
ð9Þj
F
j L
yy
ð1:2Þj
F
j D
xy
ð9Þj
F
¼ 0:912::: ’ 0:9; ð4Þ
where j xj
F
is the Frobenius norm. Notice that for theoret-
ical correctness, the weighting changes depending on the
scale. In practice, we keep this factor constant, as this did
not have a significant impact on the results in our
experiments.
Furthermore, the filter responses are normalised with
respect to their size. This guarantees a constant Frobenius
norm for any filter size, an important aspect for the scale
space analysis as discussed in the next section.
The approximated determinant of the Hessian repre-
sents the blob response in the image at location x. These
responses are stored in a blob response map over different
scales, and local maxima are detected as explained in Sec-
tion 3.4.
3.3. Scale space representation
Interest points need to be found at different scales, not
least be cause the search of correspondences often requires
their comparison in images where they are seen at different
scales. Scale spaces are usually implemented as an image
pyramid. The images are repeatedly smoothed with a
Gaussian and then sub-sampled in order to achieve a
higher level of the pyramid. Lowe [24] subtracts these pyr-
amid layers in order to get the DoG (Difference of Gaussi-
ans) images where edges and blobs can be found.
Due to the use of box filters and integral images, we do
not have to iteratively apply the same filter to the output of
a previously filtered layer, but instead can apply box filters
of any size at exactly the same speed directly on the original
image and even in parallel (although the latter is not
exploited here). Therefore, the scale space is analysed by
up-scaling the filter size rather than iteratively reducing
the image size, Fig. 4. The output of the 9 9 filter, intro-
duced in previous section, is considered as the initial scale
layer, to which we will refer as scale s ¼ 1:2 (approximating
Gaussian derivatives with r ¼ 1:2). The following layers
are obtained by filtering the image with gradually bigger
masks, taking into account the discrete nature of integral
images and the specific structure of our filters.
Note that our main motivation for this type of sampling
is its computational efficiency. Furthermore, as we do not
have to downsample the image, there is no aliasing. On
the downside, box filters preserve high-frequency compo-
nents that can get lost in zoomed-out variants of the same
scene, which can limit scale-invariance. This was however
not noticeable in our experiments.
The scale space is divided into octaves. An octave repre-
sents a series of filter response maps obtained by convolv-
ing the same input image with a filter of increasing size. In
total, an octave encompasses a scaling factor of 2 (which
implies that one needs to more than double the filter size,
see below). Each octave is subdivided into a constant num-
ber of scale levels. Due to the discrete nature of integral
images, the minimum scale difference between two subse-
quent scales depends on the length l
0
of the positive or neg-
ative lobes of the partial second order derivative in the
direction of derivation (x or y), which is set to a third of
the filter size length. For the 9 9 filter, this length l
0
is
3. For two successive levels, we must increase this size by
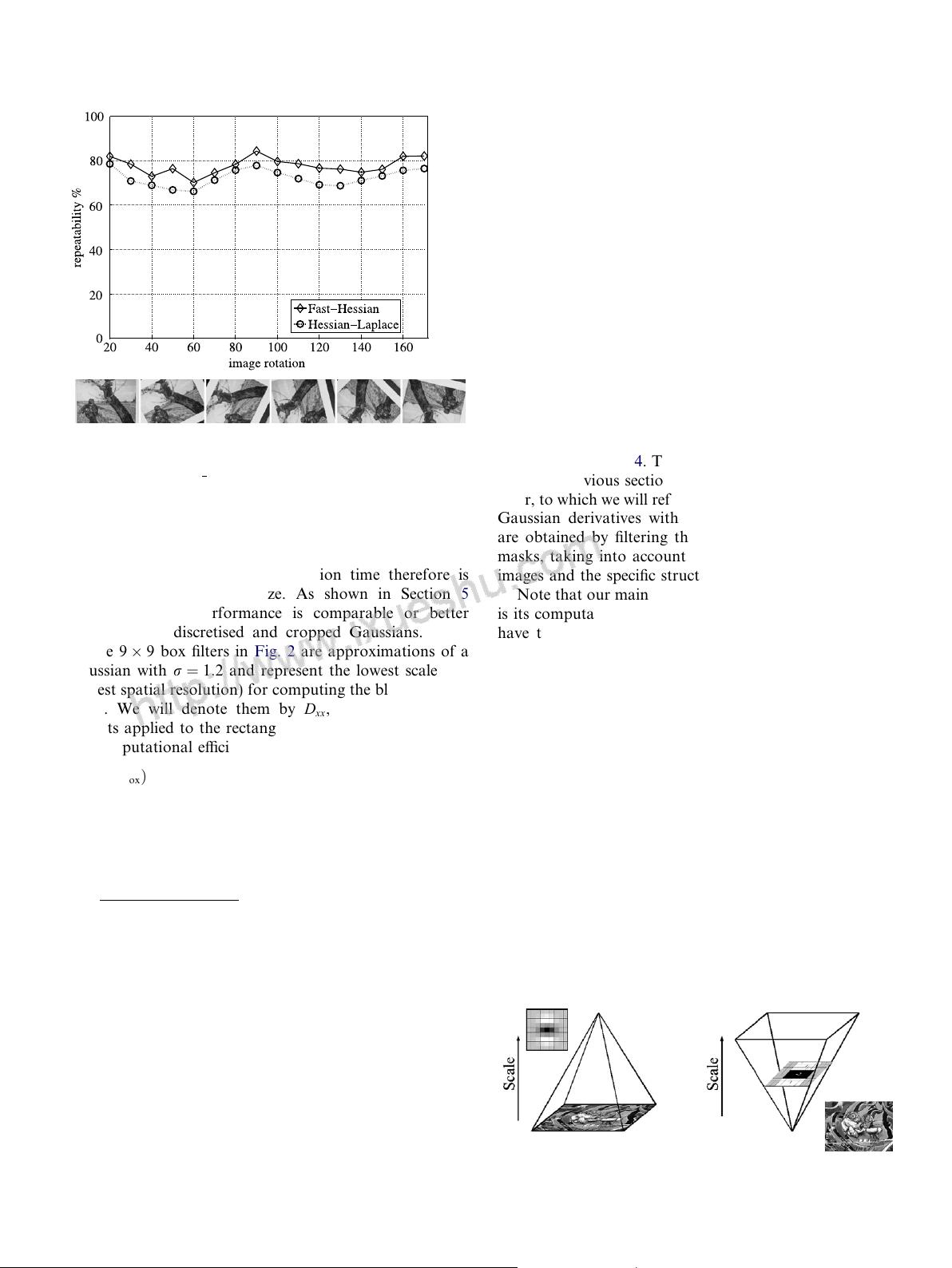
Fig. 3. Top: Repeatability score for image rotation of up to 180°. Hessian-
based detectors have in general a lower repeatability score for angles
around odd multiples of
p
4
. Bottom: Sample images from the sequence that
was used. Fast-Hessian is the more accurate version of our detector (FH-
15), as explained in Section 3.3.
Fig. 4. Instead of iteratively reducing the image size (left), the use of
integral images allows the up-scaling of the filter at constant cost (right).
H. Bay et al. / Computer Vision and Image Understanding 110 (2008) 346–359 349
剩余15页未读,继续阅读
123 浏览量
2023-03-04 上传
2012-02-14 上传
2022-05-25 上传
2022-05-30 上传
2022-06-01 上传
2022-06-17 上传
2022-06-17 上传

AI_ON
- 粉丝: 10
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 高清艺术文字图标资源,PNG和ICO格式免费下载
- mui框架HTML5应用界面组件使用示例教程
- Vue.js开发利器:chrome-vue-devtools插件解析
- 掌握ElectronBrowserJS:打造跨平台电子应用
- 前端导师教程:构建与部署社交证明页面
- Java多线程与线程安全在断点续传中的实现
- 免Root一键卸载安卓预装应用教程
- 易语言实现高级表格滚动条完美控制技巧
- 超声波测距尺的源码实现
- 数据可视化与交互:构建易用的数据界面
- 实现Discourse外聘回复自动标记的简易插件
- 链表的头插法与尾插法实现及长度计算
- Playwright与Typescript及Mocha集成:自动化UI测试实践指南
- 128x128像素线性工具图标下载集合
- 易语言安装包程序增强版:智能导入与重复库过滤
- 利用AJAX与Spotify API在Google地图中探索世界音乐排行榜
