"基于超螺旋滑模的欠驱动船舶航迹跟踪控制研究综述"
版权申诉
38 浏览量
更新于2024-03-09
1
收藏 816KB DOCX 举报
基于超螺旋滑模的欠驱动船舶航迹跟踪控制是近年来海洋事业不断发展的产物。随着船舶运输的日益增加,如何实现对船舶的高精度控制成为了当前的研究热点话题。特别是对于水面船舶这样的典型欠驱动系统,其控制难度更大,因为它在缺乏相应控制输入的同时还会受到诸如海浪等不确定性干扰的影响。因此,寻求有效的控制策略实现对欠驱动船舶的航迹跟踪控制具有着重要的理论意义和实际应用价值。
在对航迹跟踪控制方面,已经取得了较多的研究成果。其中包括自适应控制、模型预测控制、Backstepping、动态面控制、神经网络控制以及滑模控制等方法。在这些控制方法中,滑模控制因具备响应速度快,对扰动具有较强鲁棒性而受到了广泛的应用。早期的研究将滑模控制方法应用至欠驱动船舶航迹跟踪问题中,并通过实验验证了其算法的可行性。在此基础上,针对船舶水动力阻尼系数存在不确定性等问题,设计了滑模控制器,最终实现了对设定航迹的跟踪控制。同时还提出了一种基于终端滑模的控制方法,通过实验表明该方法能够实现位置误差有限时间收敛。
然而,终端滑模中存在着奇异性问题,为了解决这一问题,利用非奇异滑模控制方法对船舶的航迹跟踪控制进行了改进。此外,在现有研究成果的基础上,还有许多方面可以进行进一步的研究和探讨。例如,在考虑到船舶水动力阻尼系数存在不确定性的情况下如何设计更加鲁棒的滑模控制器;如何在滑模控制中考虑到船舶航迹跟踪中的多种不确定性因素;以及如何将滑模控制与其他控制方法相结合,以实现更加优越的船舶航迹跟踪控制效果等等。
总的来说,基于超螺旋滑模的欠驱动船舶航迹跟踪控制是一个复杂而又具有挑战性的问题。通过对滑模控制方法在船舶航迹跟踪中的应用进行研究,可以为船舶航迹跟踪控制提供更加有效和可靠的解决方案,从而进一步推动海洋事业的持续发展。希望未来有更多的学者能够加入这一研究领域,共同努力,为欠驱动船舶航迹跟踪控制领域的发展贡献自己的力量。
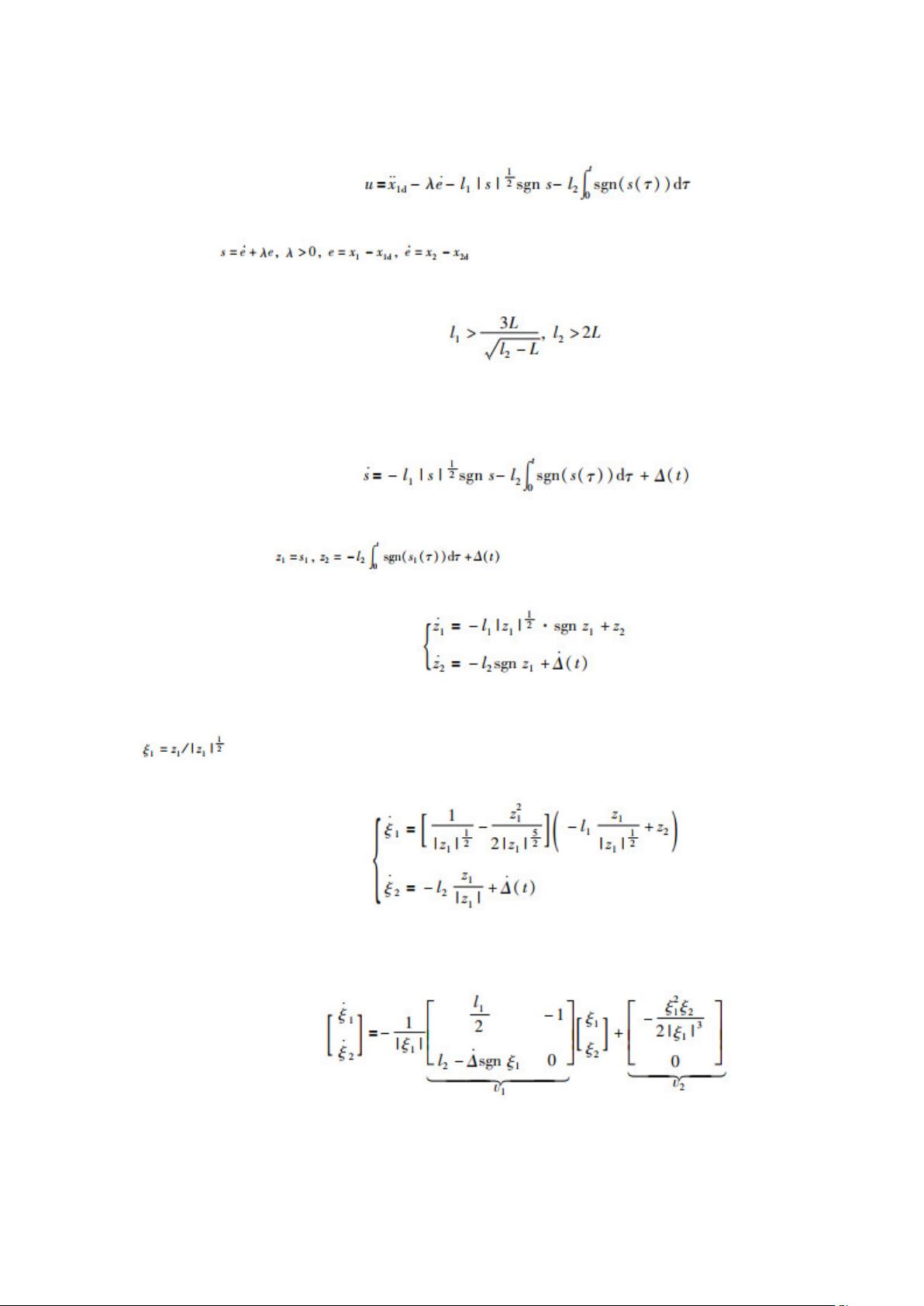
在上述假设基础上,采用文[15, 18]中的形式设计如下控制率:
(3)
其中, ,且 l
1
,l
2
为待设计参数,需满足如下关系:
(4)
将(3)式代入滑模面表达式整理后可得:
(5)
对上式整理,令 ,得:
(6)
至此便将原系统的误差收敛问题转化为证明 z
1
,z
2
收敛问题,对(6)式进行进一步整理,令
,ξ
2
=z
2
,并对 ξ
1
,ξ
2
分别求导
(7)
将 ξ
1
、ξ
2
的定义式代入(7)式中整理得:
(8)
对于(8)式定义李亚普诺夫函数 V=ξ
T
Pξ,其中 P 定义为
剩余14页未读,继续阅读
2022-04-19 上传
2019-08-07 上传
2021-05-19 上传
2021-08-18 上传
2022-06-02 上传
2023-02-23 上传
2022-07-01 上传
2022-05-29 上传
2019-09-22 上传

罗伯特之技术屋
- 粉丝: 4501
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- jquery-DOMwindow:最初来自http的jQuery DOMwindow插件的更新版本
- NLP_Basics:自然语言处理基本概念和高级概念
- go-clock
- [论坛社区]Google Sitemap生成器 v3.0 for phpwind 6.3.2_sitemap.rar
- 已加星标
- CentralLimit,modbusc#源码,c#
- AndroidStudioDemo
- Natural-Language-Processing-CS60075-:该存储库包含2020年秋季获得的NLP(CS60075)的已解决任务
- FireDoom::fire:动画DOOM feita em Java脚本
- Whowatch Hide Item Animation-crx插件
- dataVis
- Qt基于QGraphicsView绘图架构实现不同图形(多边形、圆形、矩形)的动态绘制(所见即所得)
- AnalyseFileData.zip
- NailPHP-master.zip
- ToolConvertEnglish
- SPINNER:使用 3 个 uicontrol 创建一个简单的微调控件。-matlab开发
