激光雷达网络系统:交叉口移动目标检测与跟踪算法
需积分: 9 174 浏览量
更新于2024-07-28
收藏 2.09MB PDF 举报
本文探讨的是"利用激光雷达网络检测和跟踪交叉路口的移动物体"(Detection and Tracking of Moving Objects Using a Network of Laser Scanners)。在前文中,研究人员已经开发了一个系统,通过一组水平激光扫描器监控交叉路口。然而,本文的核心在于介绍一个专门针对分布式激光扫描数据的算法,用于识别进入交叉口的每个移动物体,估计其大小,并跟踪其位置、速度和方向,尤其是在拥挤且部分被遮挡的情况下。
该算法的独特之处在于,它首次尝试利用新颖的数据源进行移动物体的检测与跟踪,这带来了前所未有的挑战和机遇。目标是设计出一个能够处理大流量、高密度交通场景的系统,具有对部分观测数据的鲁棒性,以及在复杂环境下正确处理数据关联的能力。实验结果显示,该算法在实际交叉路口的测试中表现出色,对于1063个穿越的物体,有988个得到了从入口到出口的完美追踪,追踪准确率高达92.9%。
尽管取得了显著的成果,但该系统也存在局限性,比如可能受环境因素如天气或光照条件的影响,以及对于高速移动物体的识别能力。未来的研究将集中在提高算法的实时性和准确性,优化数据处理以减少误报和漏报,以及进一步探索如何处理动态环境中更复杂的物体行为。
这篇文章为智能交通系统领域提供了重要的技术突破,展示了如何利用激光雷达网络有效地进行交叉路口的动态物体监测,这对于智能交通管理和安全至关重要。随着技术的发展,这种基于激光雷达的移动物体检测和跟踪系统有望在未来的自动驾驶、交通流量管理等领域发挥更大的作用。
658 IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS, VOL. 13, NO. 2, JUNE 2012
As has been discussed in a previous section, objects might
be partially obscured due to occlusions or range failures. For
example, when a car is only partially observed on one side, if
we do not assume any strong model on the car or we do not
even know that the object is a car, an estimation of its size and
center point could be quite unreliable. Partial observation could
greatly affect the reliability of feature parameter estimation and
could subsequently reduce accuracy in tracking moving objects.
Developing an object model to support robust feature parameter
extraction on partial observation data is key to this procedure,
as well as for building a tracking module.
In addition, a desirable detection result is that all moving
objects be successfully detected with a minimal number of false
alarms. When a moving object enters the area of laser coverage,
software can easily find the object as long as it gives a reflection
to the laser beam. However, because an object might be simul-
taneously measured by different laser scanners and because the
contour points of an object might be spatially disconnected due
to occlusions or range failures, multiple alarms could arise from
a single moving object. To reduce multiple alarms and have
more complete knowledge for feature parameter estimation,
developing an algorithm of grouping the measurements from
different laser scanners into the same object is another key to
this procedure.
In the succeeding sections, we define an object model, we
address a method of grouping the measurements from different
laser scanners to detect moving objects in the environment
and extract their feature parameters, and we conclude with an
experimental result that verifies the algorithm.
A. Object Model
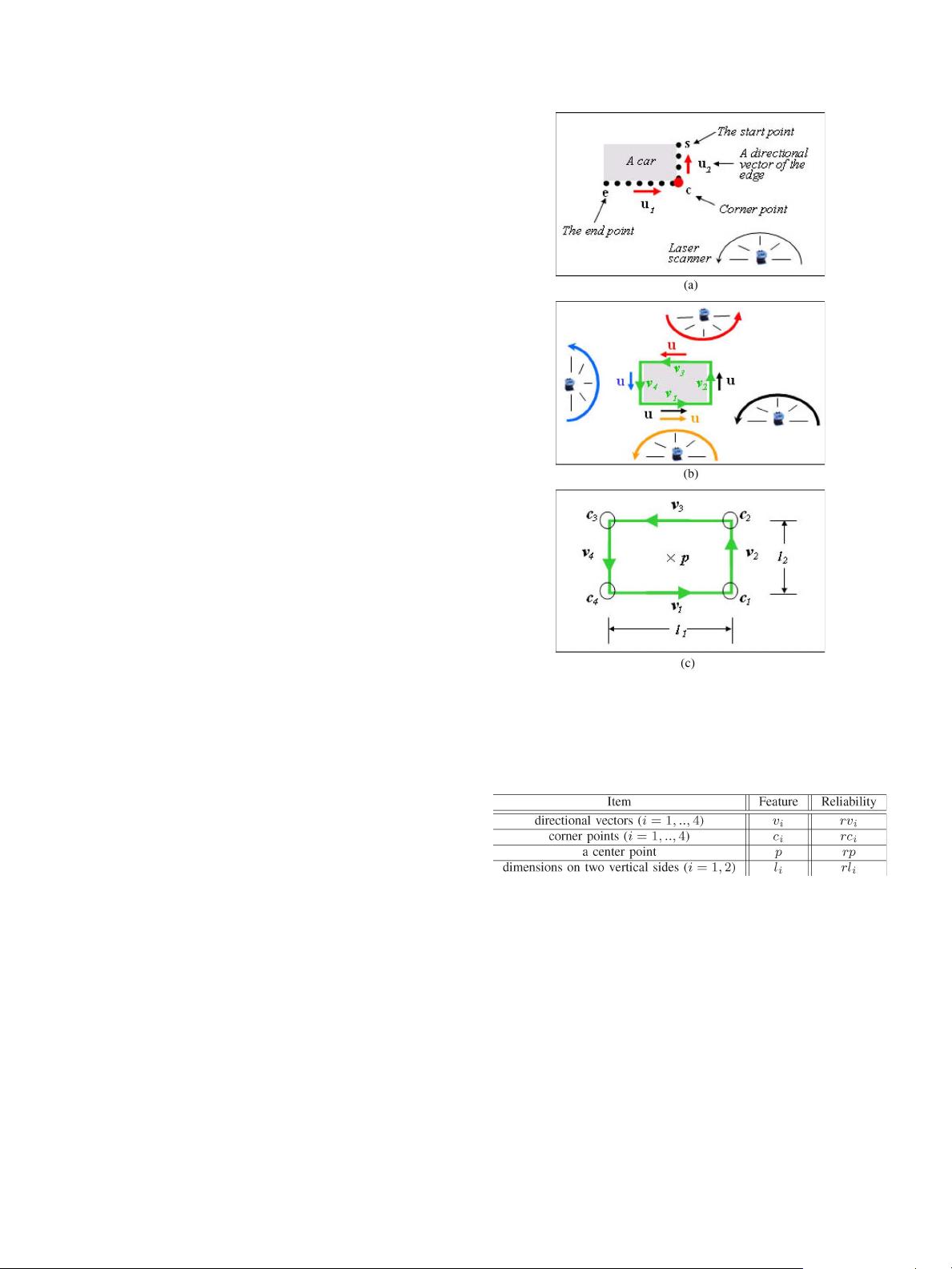
Fig. 5 describes a special characteristic of laser measure-
ments. Suppose that a laser scanner performs counterclockwise
scanning, and the horizontal contour of a car is measured by a
sequence of laser points from s to e [see Fig. 5(a)]. Simplifying
the shape of a car using a rectangle, edges that represent two
vertical sides of the car can be detected through a corner
detector and a line fitting on the laser points. A directional
vector u
i
that is associated with each edge is defined according
to the scanning order of laser points, e.g., from a point measured
later to one measured earlier.
Let u denote a directional vector that is extracted from the
data of a single laser scanner after its alignment to a reference
frame. We found that no matter where a laser scanner is placed,
directional vectors u are equal if they are observations on the
same side of the object [see Fig. 5(b)]. Suppose that v
i
s, i =
1,...,4arethedirectional vectors defined on each side of a
car, and they compose a counterclockwise loop. By matching u
with v
i
s, we can find which side of the object is measured so
that the laser points that correspond to u are used to update the
estimates of that specific side. In this work, we call u a support
vector of the side v
i
.
Based on t he aforementioned considerations, an object model
is defined in this work with the feature parameters shown in
Fig. 5(c), where the shape of an object is simplified using a
rectangular model. Developing a more accurate model for each
kind of object will be addressed in future work. In addition,
Fig. 5. Definition to an object model. (a) Measurement to a car from a single
laser scanner. (b) Measurements to a car from a network of laser scanners.
(c) Feature parameters of the object model.
TABLE I
P
ARAMETERS IN AN OBJECT MODEL
a reliability item is defined for each feature parameter for the
sake of partial observations (see Table I). Currently, reliabilities
are estimated with binary values, i.e., true =1or false =0.In
the case of a directional vector, the reliability denotes whether
the side has a support vector (reliable)ornot(unreliable).
In the case of a corner point, if both neighboring sides are
supported, the corner point is a (reliable) one; otherwise, it is
a guess through other feature parameters on the object model
(unreliable). In the case of dimensional size, reliability tells
whether the corresponding feature parameter represents a full
dimensional size (reliable) or perhaps a partial one (unreliable).
In the case of a center point, which cannot be directly observed,
the reliability denotes whether the coordinates are estimated
from other reliable feature parameters. A more detailed de-
scription of each parameter in an object model can be found
in Appendix A.
剩余15页未读,继续阅读
110 浏览量
179 浏览量
2022-07-10 上传
166 浏览量
219 浏览量
209 浏览量
2021-02-11 上传
109 浏览量

JFu付振宇
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- 桌面玫瑰恶搞小程序,带给你不一样的开心惊喜
- Win7系统语言栏无法显示?一键修复解决方案
- 防止粘贴非支持HTML的Quill.js插件
- 深入解析:微软Visual C#基础教程
- 初学者必备:超级玛丽增强版源码解析
- Web天气预报JavaScript插件使用指南
- MATLAB图像处理:蚁群算法优化抗图像收缩技术
- Flash AS3.0打造趣味打地鼠游戏
- Claxed: 简化样式的React样式组件类
- Docker与Laravel整合:跨媒体泊坞窗的设置与配置
- 快速搭建SSM框架:Maven模板工程指南
- 网众nxd远程连接工具:高效便捷的远程操作解决方案
- MySQL高效使用技巧全解析
- PIC单片机序列号编程烧录工具:自动校验与.num文件生成
- Next.js实现React博客教程:日语示例项目解析
- 医院官网构建与信息管理解决方案
