MF-1型机器人硬件与robobasic编程详解
需积分: 50 19 浏览量
更新于2024-09-09
2
收藏 947KB PDF 举报
MF-1型机器人是一款由计算机学院多智能体机器人研究中心研发的先进机器人模型,其硬件结构设计独特,旨在实现高度灵活性和精确控制。该论文详细探讨了MF-1型机器人的基本硬件构成以及robobasic编程软件的运用。
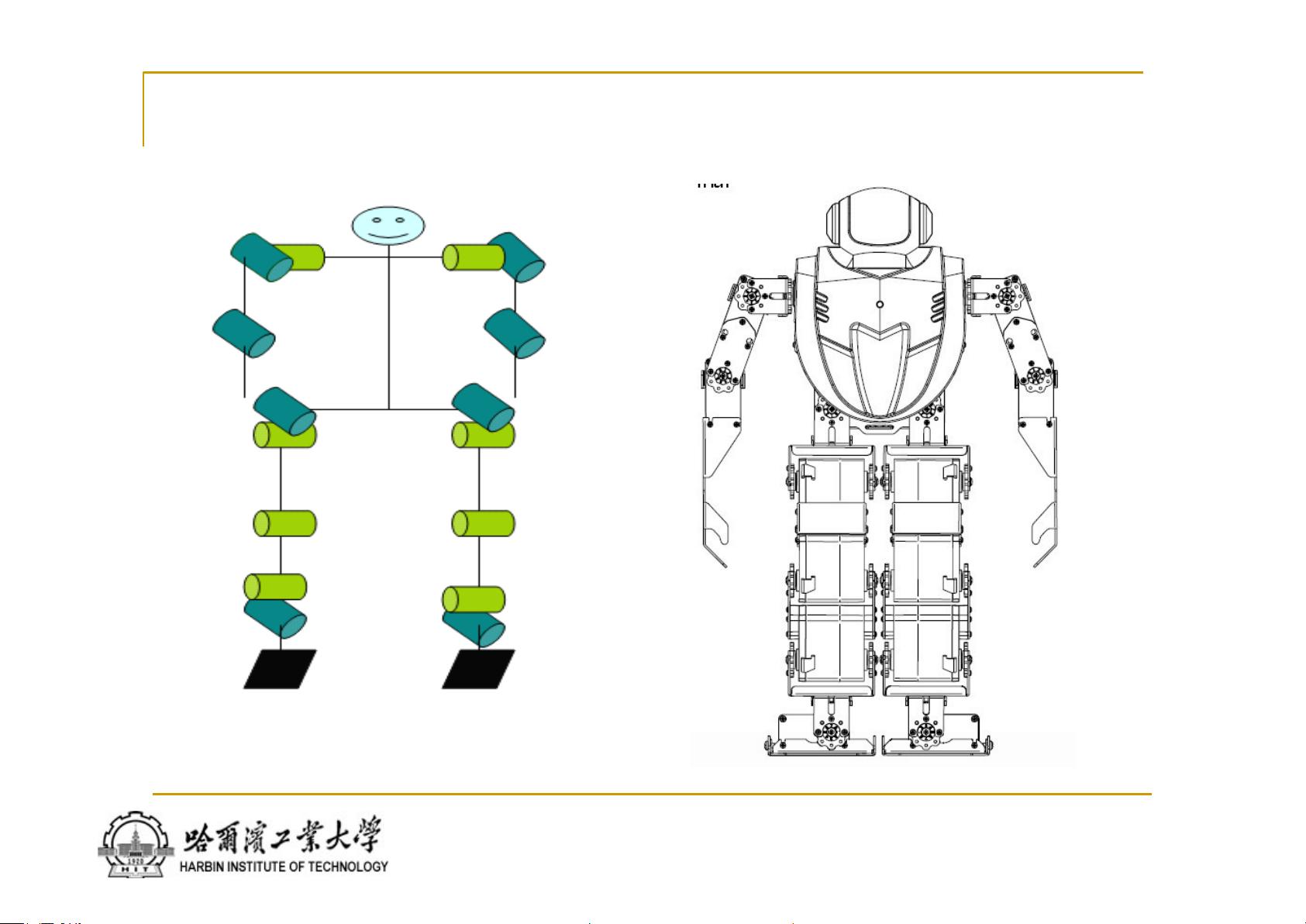
硬件方面,MF-1型机器人具有16个关节,每个关节由一个可旋转180度的伺服电机驱动,这些电机分布在腿部(5个/腿)、双臂(2个/臂)以及肩部各1个,确保了机器人具有丰富的运动能力。特别地,头部配备了一个红外传感器,用于感知环境。机器人控制器是核心组件,包括电源接口、充电器接口、开关、RS-232串口、红外接口、蓝牙接口以及倾斜传感器,提供多种通讯和交互方式。
论文还介绍了robobasic编程软件的使用。robobasic是一款针对MF-1型机器人设计的直观编程工具,用户可以通过它来编写和控制机器人的动作。设置通信端口是使用robobasic的第一步,这有助于确保与控制器的有效连接。软件开发环境包括安装指南和实时电机控制功能,如通过"controllerÆROBONOVAmotor control"指令可以查看并操作电机,从而实现精细的动作控制。
作者谢翰威在论文中提供了实际应用案例,如机器人基本动作和舞蹈动作的编写示例,使读者能够了解如何通过robobasic语言进行编程,例如,头部红外传感器可以接收外部指令,然后主控芯片执行相应的动作,比如移动或做出特定反应。
这篇论文深入剖析了MF-1型机器人的硬件架构,展示了robobasic编程软件在实际操作中的应用,并提供了实用的编程示例,对于想要学习和研究机器人技术的读者来说,具有很高的参考价值。
计算机学院 多智能体机器人研究中心
3
3
ROBONOVA-1 机器人硬件系统
Part
Part
Part
Part
Ⅰ
机器人运动结构框图
剩余10页未读,继续阅读
2021-06-30 上传
2021-10-11 上传
122 浏览量
2830 浏览量
2023-02-13 上传
2023-02-13 上传

hung_robot
- 粉丝: 1
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- WebMiniProject
- ns-react-18next:[未维护]命名空间中的i18next本地化ReactSwift
- TemplateVue-bootstrap3-sass:模板
- 一组医疗图标 .xd .sketch .svg .fig素材下载
- Rad Studio XE 10.4 Patch 补丁合集 截止2020.7.29
- 基于HTML实现的仿智慧园区触屏版html5手机门户网站模板下载(css+html+js+图样).zip
- rhythmless.github.io:我的互联网片段
- BalanceCar调试版,计算机博弈大赛c语言源码,c语言
- qblueRed42.github.io
- torchdrift-redisai:RedisAI中的TorchDrift
- rnp-find:用于探索RNA与蛋白质相互作用的生物信息学工具
- ant-apache-bcel-1.9.3.zip
- C1220G1_NguyenDucHau
- flutter-localized-locales:Flutter插件,它提供语言环境代码到563个语言环境的名称映射
- html推箱子.zip
- 基于PCB的最新PCB及相关材料IEC标准信息 国际电工委员会.zip
