CAN总线协议详解
需积分: 45 68 浏览量
更新于2024-07-28
收藏 1.87MB PDF 举报
"CAN协议完全讲解 - 瑞萨科技应用手册 Rev.1.00"
本文档是一份详尽介绍CAN(Controller Area Network)协议的入门指南,由瑞萨科技于2006年发布。CAN协议是一种国际标准化的串行通信协议,最初由德国博世公司为汽车行业开发,以满足汽车电子控制系统间高效、可靠的通信需求。随着汽车电子化的发展,CAN协议通过ISO11898和ISO11519进一步标准化,如今广泛应用于欧洲和其他地区的汽车及其他工业领域。
CAN协议的特点包括其分布式控制系统的灵活性、高容错性和低延迟通信能力。文档中提到了几个关键概念:
1. **CAN的应用示例** - 文档可能详细描述了CAN协议在汽车中的具体应用,如发动机管理系统、防抱死刹车系统、安全气囊等。
2. **总线拓扑图** - 解释了CAN网络的物理布局,包括总线型、星型、环形或混合结构。
3. **CAN的特点** - 强调了CAN的错误检测与恢复机制、位填充规则、优先级决定和同步方法。
4. **错误处理** - 包括错误状态的种类(如位错误、CRC错误等)、错误计数值以及如何通过错误帧来报告和处理问题。
5. **CAN协议的基本概念** - 阐述了CAN协议的核心要素,如帧结构、数据帧、遥控帧、错误帧、过载帧以及帧间隔。
6. **CAN协议及标准规格** - 比较了ISO11898和ISO11519-2之间的差异,并概述了CAN协议在不同标准下的实现。
7. **帧的种类** - 详细介绍了数据帧和遥控帧的结构,以及它们在传输数据和请求数据时的角色。
8. **位时序和同步** - 讨论了位的传输速率、同步策略(硬件同步、再同步)以及调整同步的规则,这些都是确保数据准确传输的关键。
9. **错误种类和输出** - 描述了不同类型的错误(主动和被动)以及如何通过错误帧来响应和通知网络上的其他节点。
文档旨在帮助初学者理解CAN协议的工作原理和实际应用,同时提供了作为实际项目参考的信息。虽然它不负责对具有CAN功能的产品承担责任,但该文档可以作为设计和实施CAN网络的宝贵资源。
应用手册
RCJ05B0027-0100/Rev.1.00 2006.02 Page 8 of 48
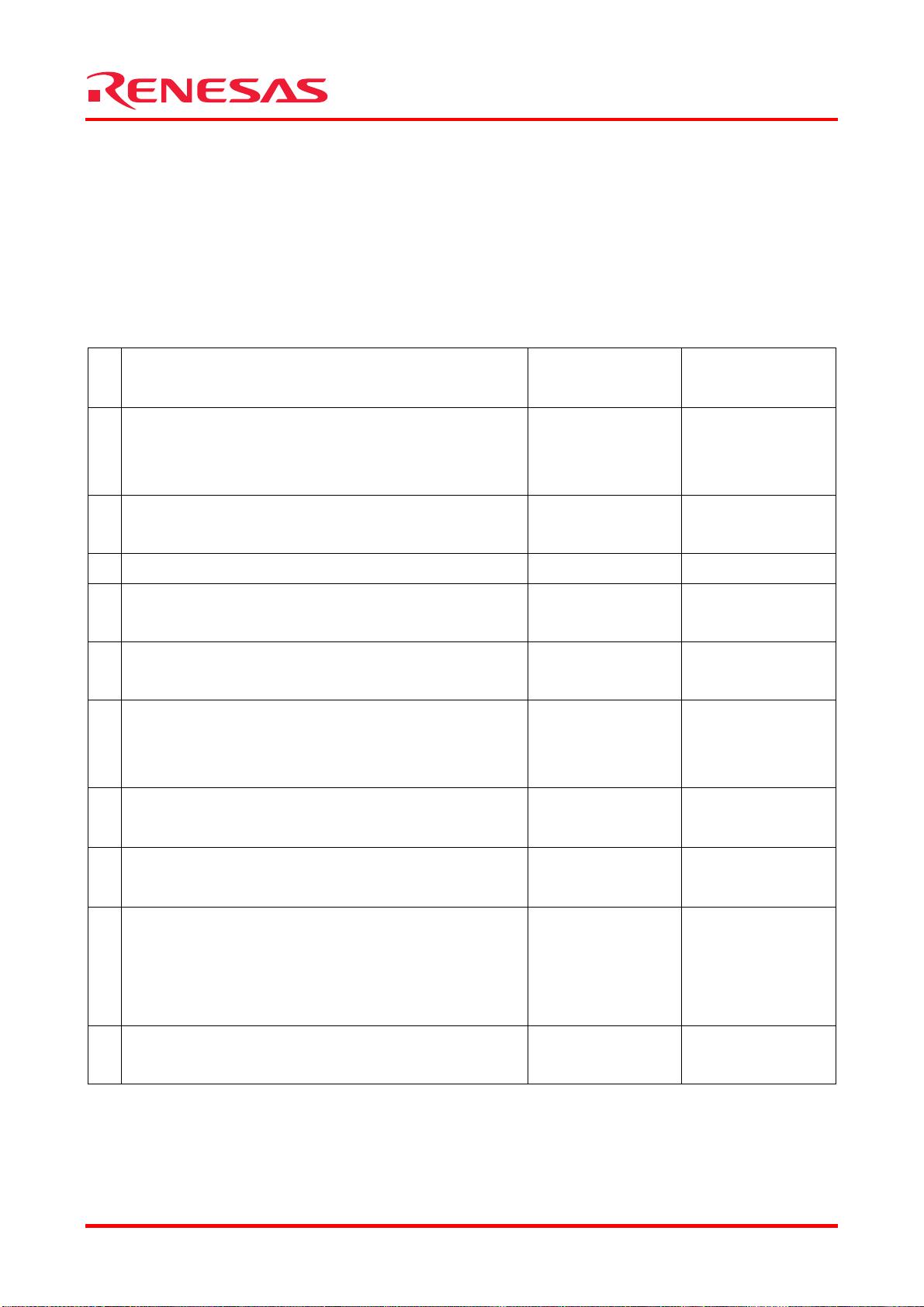
5.2 错误计数值
发送错误计数值和接收错误计数值根据一定的条件发生变化。
错误计数值的变动条件如表 2 所示。
一次数据的接收和发送可能同时满足多个条件。
错误计数器在错误标志的第一个位出现的时间点上开始计数。
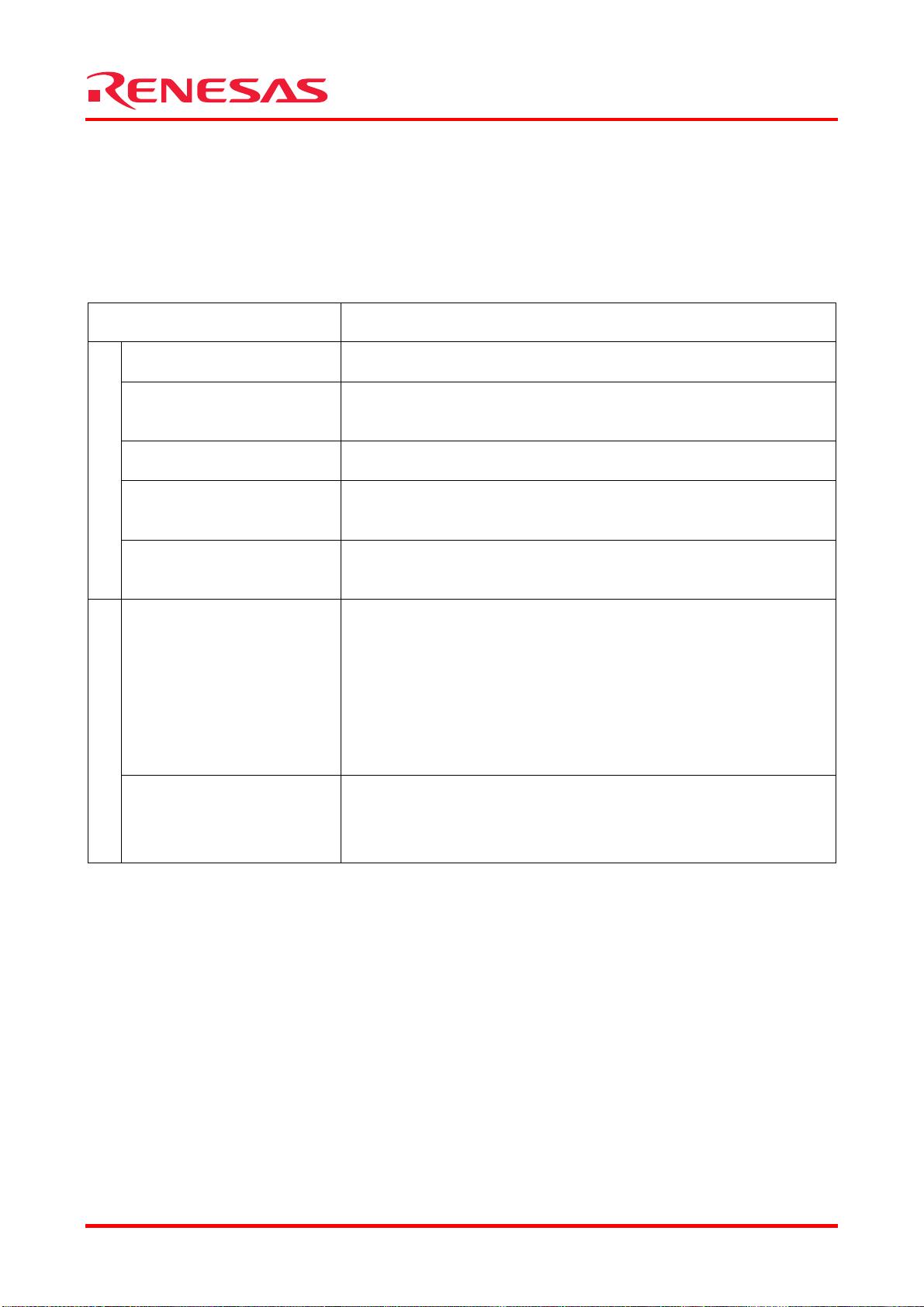
表 2. 错误计数值的变动条件
接受和发送错误计数值的变动条件 发送错误计数值
(TEC)
接收错误计数值
(REC)
1 接收单元检测出错误时。
例外:接收单元在发送错误标志或过载标志中检测出“位
错误”时,接收错误计数值不增加。
+1
2 接收单元在发送完错误标志后检测到的第一个位为显性电
平时。
+8
3 发送单元在输出错误标志时。 +8
4 发送单元在发送主动错误标志或过载标志时,检测出位错
误。
+8
5 接收单元在发送主动错误标志或过载标志时,检测出位错
误。
+8
6 各单元从主动错误标志、过载标志的最开始检测出连续 14
个位的显性位时。
之后,每检测出连续的 8 个位的显性位时。
发送时
+8
接收时
+8
7 检测出在被动错误标志后追加的连续 8 个位的显性位时。 发送时
+8
接收时
+8
8 发送单元正常发送数据结束时(返回 ACK 且到帧结束也未
检测出错误时)。
−1
TEC=0 时±0
9 接收单元正常接收数据结束时(到 CRC 未检测出错误且正
常返回 ACK 时)。
1≤REC≤127 时-1
REC=0 时±0
REC>127 时
设 REC=127
10 处于总线关闭态的单元,检测到 128 次连续 11 个位的隐
性位。
TEC=0
REC=0
剩余48页未读,继续阅读
2010-03-03 上传
2019-10-26 上传
2021-09-10 上传
2021-10-15 上传
2021-10-10 上传
2010-08-17 上传
2015-06-16 上传

tanwolve
- 粉丝: 2
- 资源: 15
 我的内容管理
展开
我的内容管理
展开







最新资源
- AA4MM开源软件:多建模与模拟耦合工具介绍
- Swagger实时生成器的探索与应用
- Swagger UI:Trunkit API 文档生成与交互指南
- 粉红色留言表单网页模板,简洁美观的HTML模板下载
- OWIN中间件集成BioID OAuth 2.0客户端指南
- 响应式黑色博客CSS模板及前端源码介绍
- Eclipse下使用AVR Dragon调试Arduino Uno ATmega328P项目
- UrlPerf-开源:简明性能测试器
- ConEmuPack 190623:Windows下的Linux Terminator式分屏工具
- 安卓系统工具:易语言开发的卸载预装软件工具更新
- Node.js 示例库:概念证明、测试与演示
- Wi-Fi红外发射器:NodeMCU版Alexa控制与实时反馈
- 易语言实现高效大文件字符串替换方法
- MATLAB光学仿真分析:波的干涉现象深入研究
- stdError中间件:简化服务器错误处理的工具
- Ruby环境下的Dynamiq客户端使用指南
