多元宇宙模型:未来轨迹的多路径预测与新数据集
196 浏览量
更新于2024-06-20
收藏 1.21MB PDF 举报
"分叉路径的花园:未来轨迹的多元预测"
在计算机视觉和人工智能领域,预测人类的行为,尤其是行人的未来轨迹,是一项重要的任务。这项任务对于自动驾驶、长期目标跟踪、安全监控和机器人规划等应用至关重要。传统的未来轨迹预测方法往往只能提供单一的预测路径,但在实际生活中,人的行动具有多重可能性,这取决于他们的目标和环境因素。
《分叉路径的花园:走向多未来轨迹预测》这篇论文提出了解决这一问题的新方法。首先,作者们创建了一个名为"分叉路径"的新数据集,它基于真实世界的行人轨迹数据,并通过3D模拟器进行扩展。在这个数据集中,人类注释员参与到合成世界中,引导代理执行不同的潜在行动,从而产生多种可能的未来轨迹。这个数据集为评估预测模型的多样性提供了第一个基准。
论文的第二个贡献是一个名为"多元宇宙"的新模型。这个模型利用多尺度位置编码和卷积递归神经网络(Convolutional Recurrent Neural Network,CRNN)在图上的创新设计,生成多个合理的未来轨迹。通过这样的设计,模型能够考虑到环境和个体目标的不确定性,从而产生更贴近实际的预测结果。
在实验部分,"多元宇宙"模型在"分叉路径"数据集以及真实世界的VIRAT/ActEV数据集上表现出最佳性能。VIRAT/ActEV数据集仅包含单一未来路径,而"分叉路径"数据集则允许评估模型对多种未来可能性的预测能力。这一成果不仅提升了预测的准确性,还增加了预测的多样性和可靠性,对于理解和应对复杂环境中的行人行为预测具有重大意义。
这篇论文为未来轨迹预测带来了全新的视角,强调了预测不确定性的处理,并提供了相应的数据集和模型来支持这一方向的研究。通过这种方式,研究人员可以更好地模拟真实世界的复杂性和多样性,为实际应用提供更为精确的预测工具。
10510
不
不
t
−
1
不
H
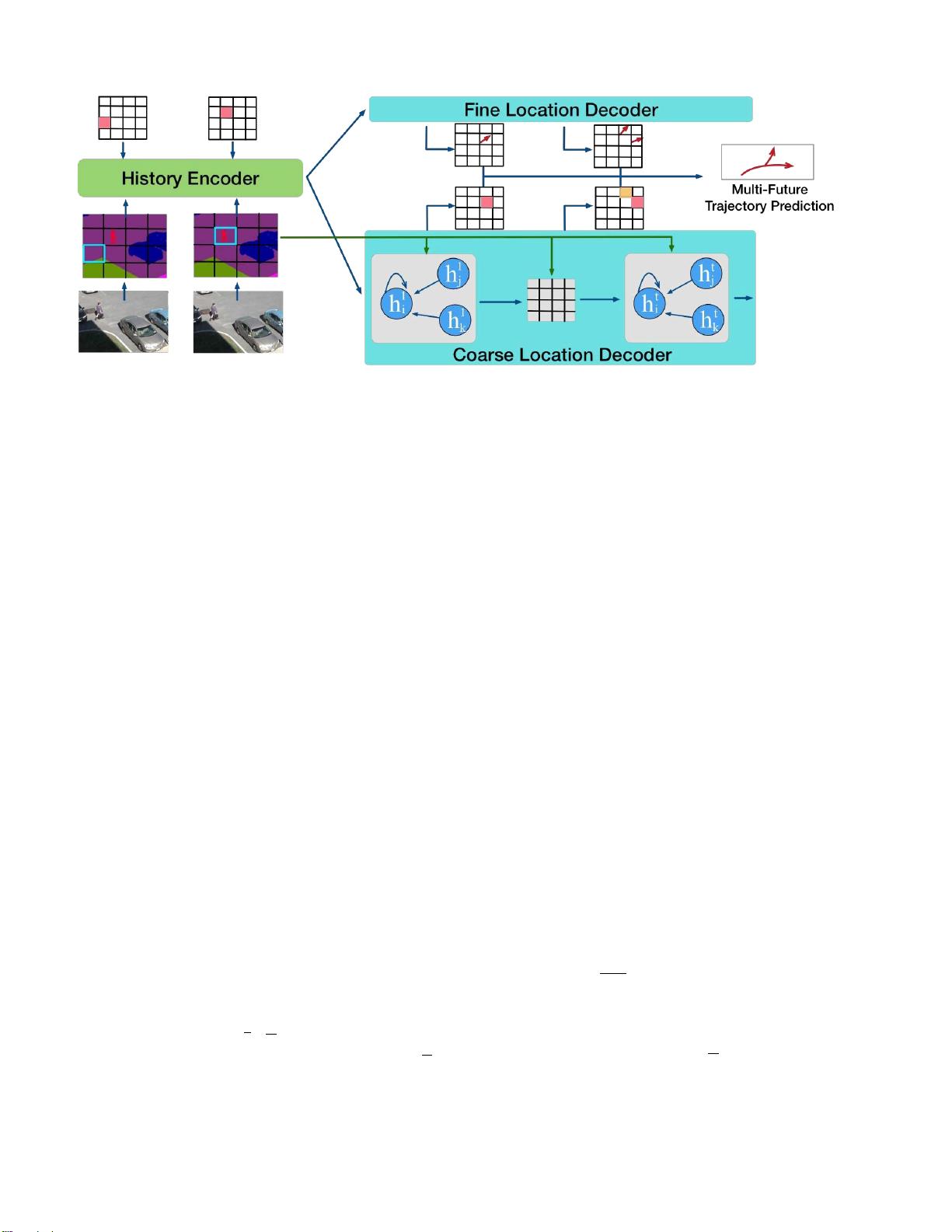
图2:我们的模型概述。模型的输入是地面实况位置历史和一组视频帧,这些视频帧由语义分割模型进行预处理。
这是由“历史编码器”卷积RNN编码的。编码器的输出被馈送到卷积RNN解码器以进行位置预测。粗略位置解码器
在大小为
H×W
的2D网格上输出热图。精细位置解码器输出每个网格单元内的矢量偏移。
这些被组合以生成预测位置的R
2
上的多模态分布
索引从1到HW。受[22,31]的启发,我们使用两种不
同的网格尺度(36×18和18×9)对位置进行编码;我们
在第二节中展示了这种多尺度编码的好处。
第5.4条。为了简单起见,我们只关注一个
H×W网格。
为了使模型对低级视觉更不变性,
细节,并因此对域移位更鲁棒(
例如
,在不同场景之
间、同一场景的不同视图之间、或者在真实图像和合
成图像之间),我们使用预先训练的语义分割模型对
每个视频帧
Vt
进行
预处理,其中
K
=
每像素
13
个可能的类
别标签公司现采用国际
(被称为
“置信状态”)由C t(i)= p(Y t =
i)
表示
|
Y
h
:
t
−
1
,
H
)
,其中
n
i
∈
G
且
t
∈
[
h
+
1
,
T
]
。 对
于
brevity
,
我们使用单个索引
i
来表示
2D
网格中的单
元格。
而不是假设一个马尔可夫模型,我们更新使用卷积递
归神经网络,隐藏状态H
C
。然后,我们通过以下方式
计算信念状态:
C
t
=
softmax ( W<$H
C
) ∈R
HW
(
2
)
这里我们使用带有一个滤波器的2D卷积,并在应用
softmax之前平坦化空间维度。使用以下命令更新隐藏
状态
H
C
=
ConvRNN
(
GAT
(
H
C
)
,
embed
(
C
t
−
1
))
(
3
)
Deeplab模型[8]在ADE 20k [65]数据集上训练,
t
t
−
1
保持体重不变设
St
是
这个语义分割图,它被建模为大小
为H×W×K的张量。
然后,我们将这些输入传递给卷积RNN [58,
为了计算时空特征历史:
其中embed(
C
t−1
)嵌入大小为
H×
的3D张量
W×d
e
,
d
e
是嵌入大小。 GAT(
H
C
)是一个图形注意
力网络[55],其中图形结构
对应于G中的二维网格。 更准确地说,让h
i
H
e
=
ConvRNN
(
one-hot
(
Y
t
))
<$(
W
<$
S
t
)
,
H
e
)
(
1
)
中的第i个网格单元对应的特征向量。
t t
−
1
H
C
,设
h
为
H
C
=
其中,λ是逐元素乘积,并且λ表示2D。
t
−
1
C
我
高
×
宽
×
宽
t
−
1
GAT(H
t−1
)∈R
dec
,其中
d
dec
是
conv
解决方案。函数
one-hot
(
·
)
投射一个单元格索引
x
根据下式,将其转化为大小为H×W的独热嵌入:
解码器隐藏状态。我们使用以下公式计算GAT的这些
输出:
其空间位置。 我们使用这个编码器
H
e
∈
R
H
×
W
×
d
enc
,其中
d
enc
是隐藏大小,到
ini-
确认解码器的状态。 我们也使用时间
h
i
=
1
|N
i
|
Σ
j∈N
i
f
e
(
[
v
i
,
v
j
]
)
+
h
i
(
4
)
语义映射的平均值,
S
=
1
h
S
,在每个
期间,其中N是节点
v
的最
大值
在G中,每个节点
h
t
=1
t
i i
解码步骤。 上下文表示为H
=
[
H
e
,
S
]。
3.2.
粗定位解码器
在得到上下文H之后,我们的目标是预测未来的位
置。我们首先集中在预测的位置在网格单元的水平,
Y
t
∈G
。在3.3节中,我们讨论了如何预测
R2
中的连续偏
移量,它指定了一个
从每个网格单元的中心,以获得细粒度的位置预测。
令在时间
t
的网格位置上的粗略分布
剩余14页未读,继续阅读
2021-02-26 上传
2021-02-04 上传
2021-02-19 上传
2021-06-27 上传
2021-03-06 上传
2021-03-24 上传
2021-03-13 上传
2021-05-31 上传
2021-05-14 上传

cpongm
- 粉丝: 5
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Postman安装与功能详解:适用于API测试与HTTP请求
- Dart打造简易Web服务器教程:simple-server-dart
- FFmpeg 4.4 快速搭建与环境变量配置教程
- 牛顿井在围棋中的应用:利用牛顿多项式求根技术
- SpringBoot结合MySQL实现MQTT消息持久化教程
- C语言实现水仙花数输出方法详解
- Avatar_Utils库1.0.10版本发布,Python开发者必备工具
- Python爬虫实现漫画榜单数据处理与可视化分析
- 解压缩教材程序文件的正确方法
- 快速搭建Spring Boot Web项目实战指南
- Avatar Utils 1.8.1 工具包的安装与使用指南
- GatewayWorker扩展包压缩文件的下载与使用指南
- 实现饮食目标的开源Visual Basic编码程序
- 打造个性化O'RLY动物封面生成器
- Avatar_Utils库打包文件安装与使用指南
- Python端口扫描工具的设计与实现要点解析
