VB上位机实现舵机控制:简洁串口编程与发送
需积分: 9 150 浏览量
更新于2024-09-11
1
收藏 64KB DOC 举报
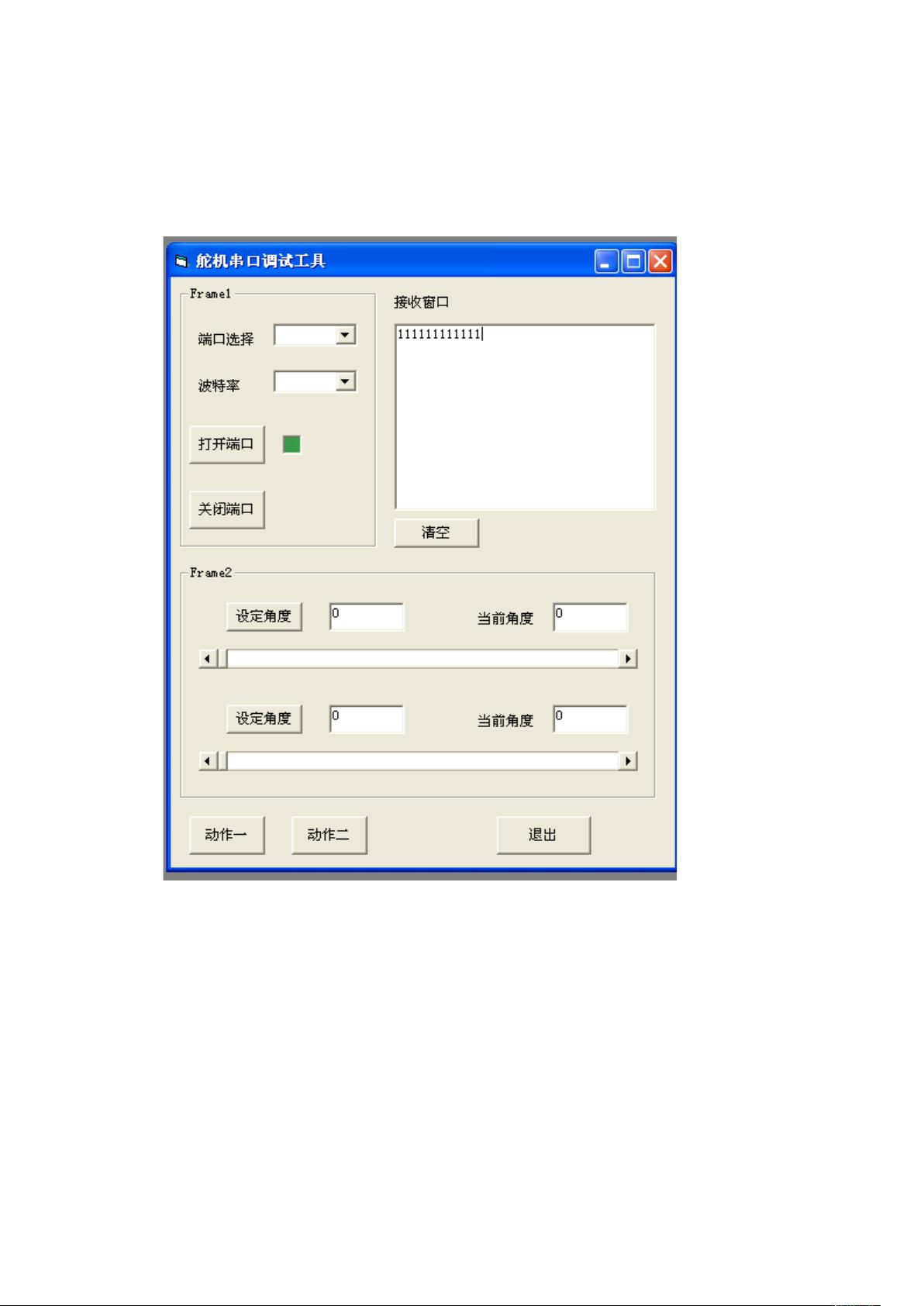
在本篇VB上位机舵机控制程序中,作者开始时考虑使用效率更高的C++编写,但由于项目规模较小,选择使用Visual Basic (VB)作为替代方案,以节省时间。VB的使用对作者来说是个新的尝试,他通过M3板子进行串口通信实验,程序默认连接到COM1,能够接收串口信号,但串口数据发送功能还未完成。
首先,程序设计了几个控件以管理不同的串口设置。`Combo1`控件用于选择COM端口,当用户在下拉列表中选择COM1、COM2、COM3或COM4时,相应的端口号会被赋值给`MSComm1`对象的`CommPort`属性。`Combo2`控件则是设置波特率,当选择9600或115200时,会更新`MSComm1`的`Settings`属性,确保正确的数据传输速率、停止位、数据位和校验位。
`Command1_Click`事件处理函数用于打开串口,如果`MSComm1`尚未打开,则执行`PortOpen=True`操作。而`Command10_Click`负责将文本框`Text5`中的角度值通过串口发送出去,这表明程序具有向舵机发送指令的能力。关闭串口的功能由`Command2_Click`事件实现,当用户点击时,关闭`MSComm1`的`PortOpen`状态。
然而,程序的一个不足在于,如果`Text2`文本框没有输入数值,`Command5_Click`事件会弹出一个警告对话框,提示用户输入数值,防止程序因空值或非法输入导致错误。这体现了对用户输入的有效性验证,保证了程序的健壮性。
尽管代码基础且结构清晰,但作者提到的“发送还没有完成”可能意味着还有进一步的串口数据发送函数或协议解析未被提及。此外,考虑到舵机控制的实时性和精度,可能需要添加数据接收和解析部分,以及与舵机运动相关的逻辑,如角度计算和反馈控制。随着项目的进展,这部分内容预计会逐步完善。
这篇VB上位机舵机控制程序提供了基本的串口通信功能,但在实际应用中可能需要结合舵机驱动和更复杂的通信协议来提升性能和稳定性。通过学习和实践,作者可以积累宝贵的VB编程经验,适用于类似嵌入式系统控制的项目。
下载后可阅读完整内容,剩余4页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2018-04-03 上传
2021-04-22 上传
117 浏览量
点击了解资源详情
点击了解资源详情
点击了解资源详情

f2010f
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular程序高效加载与展示海量Excel数据技巧
- Argos客户端开发流程及Vue配置指南
- 基于源码的PHP Webshell审查工具介绍
- Mina任务部署Rpush教程与实践指南
- 密歇根大学主题新标签页壁纸与多功能扩展
- Golang编程入门:基础代码学习教程
- Aplysia吸引子分析MATLAB代码套件解读
- 程序性竞争问题解决实践指南
- lyra: Rust语言实现的特征提取POC功能
- Chrome扩展:NBA全明星新标签壁纸
- 探索通用Lisp用户空间文件系统clufs_0.7
- dheap: Haxe实现的高效D-ary堆算法
- 利用BladeRF实现简易VNA频率响应分析工具
- 深度解析Amazon SQS在C#中的应用实践
- 正义联盟计划管理系统:udemy-heroes-demo-09
- JavaScript语法jsonpointer替代实现介绍
