VAN-CAN双网结构:车载多路传输系统详解
94 浏览量
更新于2024-09-01
收藏 291KB PDF 举报
车载多路传输系统在现代汽车电子技术中扮演着至关重要的角色,其中VAN网和cAN网是最常见的两种架构。VAN网(Vehicle Area Network)以其多路传输能力广泛应用于汽车舒适性和娱乐系统,而CAN网(Controller Area Network)则专用于处理汽车动力系统和安全相关功能。本文将详细介绍这两种网络的结构类型及其在实际应用中的发展。
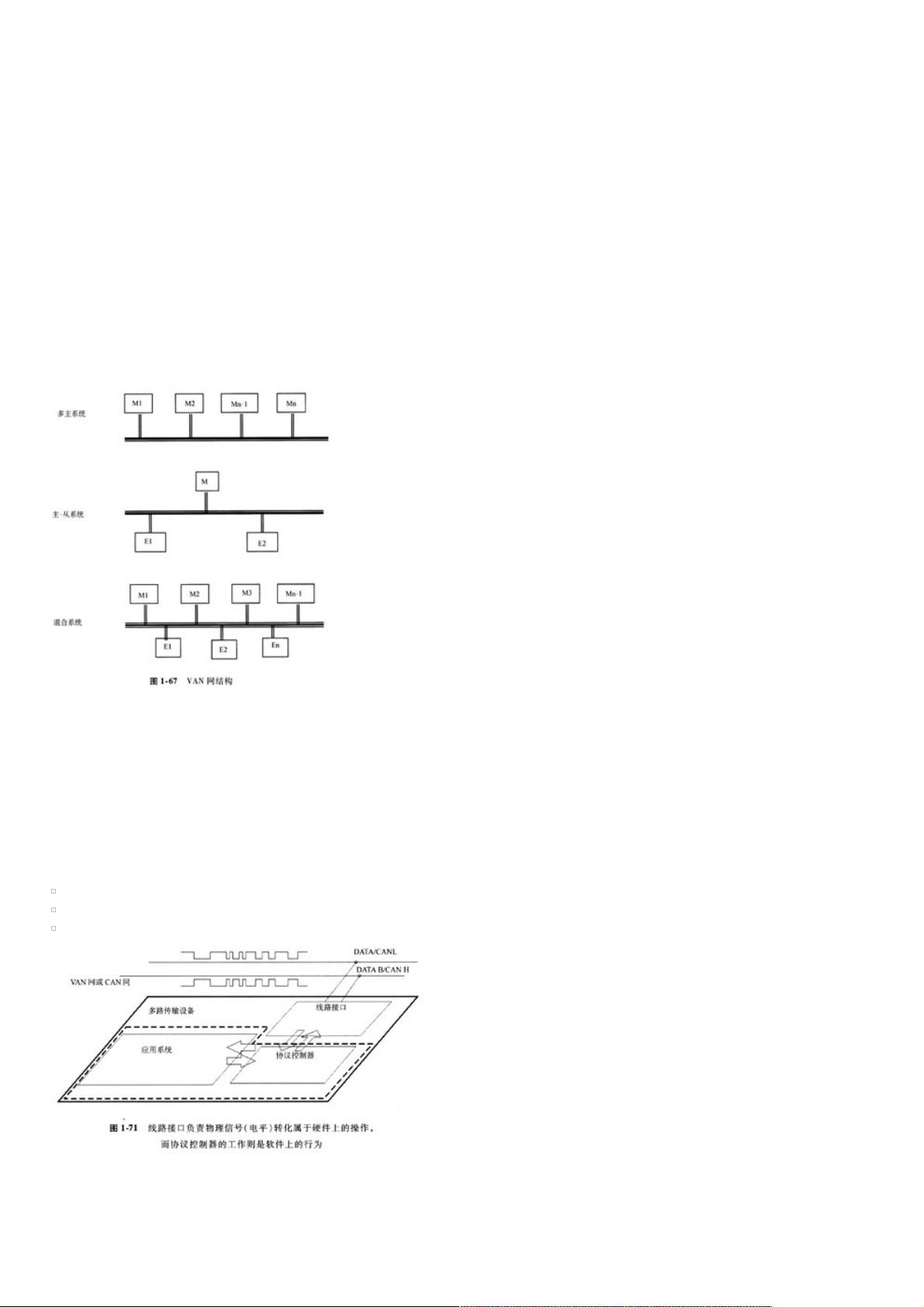
首先,VAN网的基本结构包括三种:多主系统、主一从系统和混合系统。在多主系统中,所有电子控制单元(ECU)都具有优先发送本地请求的权限,适合处理如发动机和底盘这类机械功能的高速通信,速率通常为250kbit/s,允许8字节的短消息传输。而在主一从系统中,如VAN舒适网,它是一种多主控网络,常用于仪表盘、音响、空调等显示功能,典型速率125kbit/s,信息长度最大可达28字节,支持交互式操作。
另一方面,cAN网主要用于低速、低成本但稳定性的应用,如VAN车身网1和2,这些网络针对车身控制如安全气囊、车门和座椅等,采用主一从结构简化了网络复杂性,主系统的典型速率是62.5kbit/s,信息长度也限制在28字节。诊断功能则通过速率较低的K线连接,用于制造商控制系统诊断和法规强制的系统间ECU诊断,K线与BSI(Body System Interface)的连接速率通常为10.4kbit/s。
VAN-CAN双网结构的出现,如在雪铁龙C5轿车中,旨在提供更高的车辆性能和舒适度。这种结构通过整合CAN的高效性和VAN的多功能性,确保了不同系统之间的有效通信。网络布局和协议控制器的设计对于确保整个系统的可靠性和兼容性至关重要,它们分别负责不同网段的数据传输和管理。
车载多路传输系统的结构类型不仅关乎汽车内部通信的效率和安全性,还直接影响到驾驶体验和车辆的整体性能。随着技术的发展,未来的车载网络可能会更加智能化和集成化,进一步提升汽车的智能化水平。
典型车载多路传输系统的结构类型典型车载多路传输系统的结构类型
目前应用最广泛的多路传输系统有VAN网和cAN网,VAN网的的基本结构有三种:多主系统、主一从系统和混
合系统。
一、VAN-CAN双网结构类型
1.典型的多路传输系统的基本结构
参见图1-67。
2.结构类型的发展历程
法国雪铁龙汽车公司最先开发的车载VAN舒适网,主要连接对象是汽车音响、照明系统、导航系统和显示屏,主要应用车型
有赛纳车型和萨拉毕加索车型等。
到了雪铁龙C5轿车,则出现了新的VAN-CAN双网并存的网络结构(参见图1.68和图1-69),其目的是为了满足更多功能和更高
的舒适度享受的高级车辆。
例如,CAN内部系统网络的应运而生就是为了满足发动机、变速器和底盘的各项功能。VAN舒适网则是为了兼容以下性能
如:彩色屏幕的导航仪、更高级别的车辆收放机、更高级别的空调等。而新增添的VAN车身l和VAN车身2两个网则是为了符合
车身外部设备以及座舱的功能要求如:前部的安全气囊、转向盘下转换模块、视觉设备、车门、天窗、雨水传感器、座位记忆
盒等等。这两个网的传输速率为62.5kbit/s。开发这两个车身网的主要目的为了识别网络中的安全功能。VAN网和CAN网布
置方式有所不同,可参见图1-70。VAN-CAN双网的线路接口和网络协议控制器的作用见图1-71。
在VAN-CAN双网结构中,其具体的构成如下:
①短信息高速率的CAN内部系统网络适用于机械功能、发动机和底盘,为多主系统网络(所有电脑都有优先发送本地请求的权
利):速率=250kbit/s(速率提升,速度在一定范围内的变化可以导致状态的改变);短信长度最多为8个字节。
②长信息中速VAN舒适网适用于仪表、收放机、空调控制、导航系统等等的显示功能(显示系统共享),为多主控式网络,适用
于交互式功能。主系统:BSI,125khit/s的典型速率,适用于舒适设备的信息长度最多为28个字节。
③低速率低成本的VAN车身网1和车身网2两个网,运行的稳定性好,适用于安全气囊,前照大灯,车门,车门玻璃,座椅,
微粒过滤器,转向盘等等,其主一从网络没有以前复杂,但是更加有决定性。主系统:BSI,62.5kbit/s的典型速率,信息长
下载后可阅读完整内容,剩余4页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2013-05-01 上传
2024-01-14 上传
2010-05-21 上传
2013-07-19 上传
2022-10-20 上传
2019-04-29 上传

weixin_38732454
- 粉丝: 6
- 资源: 952
 我的内容管理
展开
我的内容管理
展开







最新资源
- JavaScript实现的高效pomodoro时钟教程
- CMake 3.25.3版本发布:程序员必备构建工具
- 直流无刷电机控制技术项目源码集合
- Ak Kamal电子安全客户端加载器-CRX插件介绍
- 揭露流氓软件:月息背后的秘密
- 京东自动抢购茅台脚本指南:如何设置eid与fp参数
- 动态格式化Matlab轴刻度标签 - ticklabelformat实用教程
- DSTUHack2021后端接口与Go语言实现解析
- CMake 3.25.2版本Linux软件包发布
- Node.js网络数据抓取技术深入解析
- QRSorteios-crx扩展:优化税务文件扫描流程
- 掌握JavaScript中的算法技巧
- Rails+React打造MF员工租房解决方案
- Utsanjan:自学成才的UI/UX设计师与技术博客作者
- CMake 3.25.2版本发布,支持Windows x86_64架构
- AR_RENTAL平台:HTML技术在增强现实领域的应用
