单目相机成像模型解析:从世界到像素坐标系
需积分: 0 131 浏览量
更新于2024-08-05
收藏 3.93MB PDF 举报
"本文介绍了单目成像过程,包括理想情况下的模型和考虑畸变的情况,以及各个坐标系之间的转换关系。"
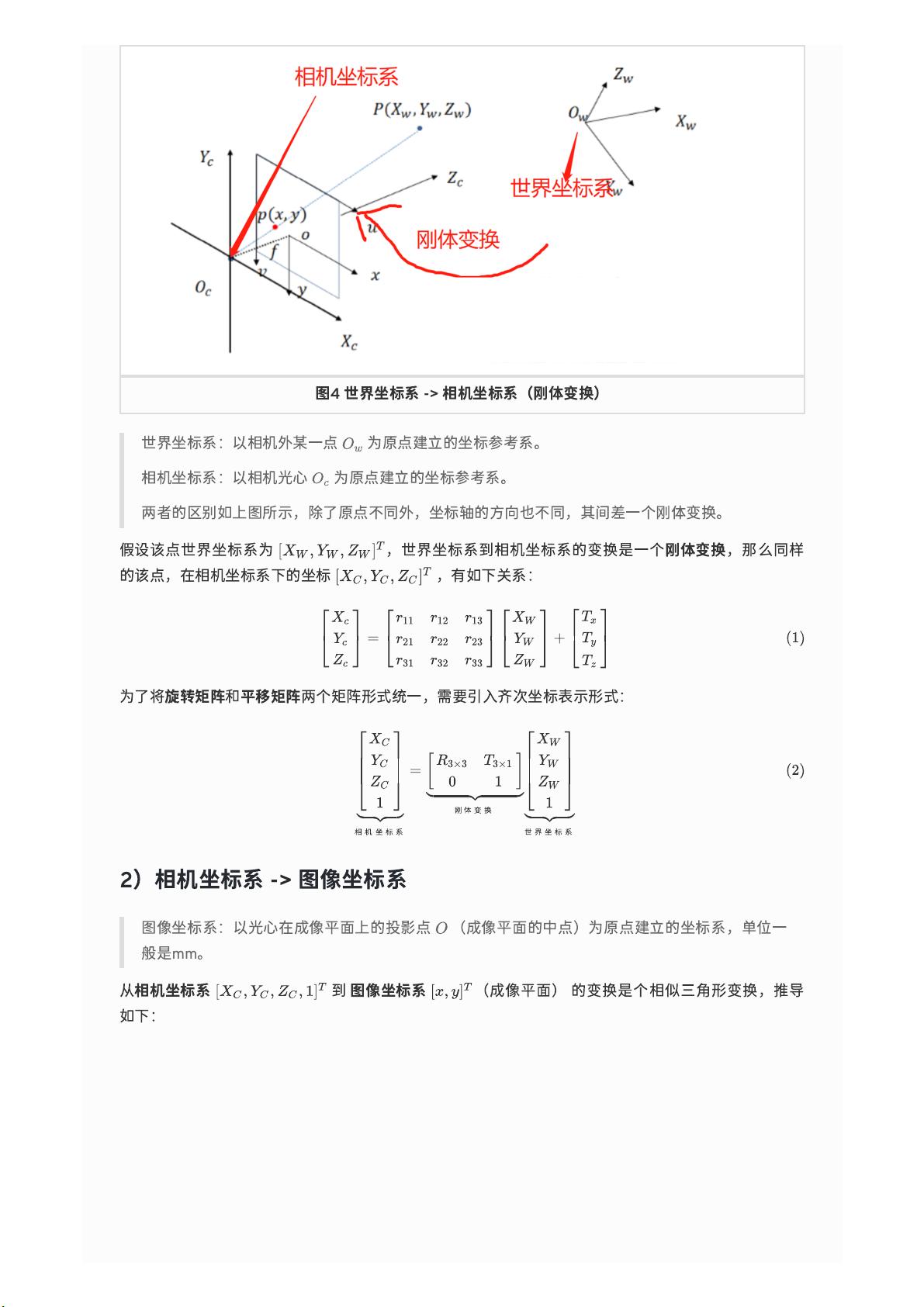
在理解单目相机成像过程时,我们需要掌握几个关键的概念和转换步骤。首先,从世界坐标系到相机坐标系的转换涉及到刚体变换,这通常由一个旋转矩阵R和一个平移向量t表示,它们合成为相机坐标系相对于世界坐标系的变换。世界坐标系是一个全局参考系,而相机坐标系以相机的光学中心为原点。
接着,相机坐标系到图像坐标系的转换基于相似三角形原理。在这个过程中,空间中的点在经过镜头后会在成像平面上形成倒立的实像。图像坐标系是以成像平面上光学中心的投影点为原点建立的,单位通常是毫米。这个转换通常用相机内参矩阵K来描述,其中包括焦距、主点坐标等参数。
然后,图像坐标系到像素坐标系的转换涉及到物理尺寸到像素坐标的映射。图像坐标系的单位是毫米,而像素坐标系的单位是像素。图像坐标系的原点位于成像平面的中心,而像素坐标系的原点通常在左上角。为了从图像坐标系转换到像素坐标系,我们需要应用相机的分辨率和比例因子。
在理想情况下,这个过程相对简单。然而,实际情况中,相机成像会受到径向畸变和切向畸变的影响。径向畸变是由于镜头非理想形状导致的,使得远离中心的图像点偏离了应有的位置。切向畸变则是由于镜头和成像平面不完全平行造成的。为了校正这些畸变,我们需要进行额外的校准和映射。
成像过程的总结可以归纳为以下几步:
1. 世界坐标系中的点通过刚体变换进入相机坐标系。
2. 相机坐标系的点经过相似变换映射到图像坐标系。
3. 图像坐标系的点经过坐标平移和缩放转换到像素坐标系。
最后,思考问题可能涉及如何实际进行相机标定以获取内参矩阵,如何计算和校正畸变,以及如何利用这些知识在实际应用中进行三维重建或目标检测。
单目相机成像过程是一个包含多个坐标系转换的复杂过程,理解和掌握这一过程对于计算机视觉和图像处理领域的诸多应用至关重要,如自动驾驶、无人机导航、虚拟现实等。了解并能准确执行这些转换,可以提高图像处理的精度和效率。
图
4
世
界
坐
标
系
->
相
机
坐
标
系
(
刚
体
变
换
)
世
界
坐
标
系
:
以
相
机
外
某
⼀
点
为
原
点
建
⽴
的
坐
标
参
考
系
。
相
机
坐
标
系
:
以
相
机
光
⼼
为
原
点
建
⽴
的
坐
标
参
考
系
。
两
者
的
区
别
如
上
图
所
⽰
,
除
了
原
点
不
同
外
,
坐
标
轴
的
⽅
向
也不
同
,
其
间
差
⼀
个
刚
体
变
换
。
假
设该
点
世
界
坐
标
系
为
,
世
界
坐
标
系
到
相
机
坐
标
系
的
变
换
是
⼀
个
刚
体
变
换
,
那
么
同
样
的
该
点
,
在
相
机
坐
标
系
下
的
坐
标
,
有
如
下
关
系
:
为了
将
旋
转
矩
阵
和
平
移
矩
阵
两个
矩
阵
形式
统
⼀
,
需
要
引
⼊⻬
次
坐
标
表
⽰
形式
:
相
机
坐
标
系
刚
体
变
换
世
界
坐
标
系
2
)
相
机
坐
标
系
->
图
像
坐
标
系
图
像
坐
标
系
:
以
光
⼼
在
成
像
平
⾯
上
的
投
影
点
(
成
像
平
⾯
的
中
点
)
为
原
点
建
⽴
的
坐
标
系
,
单
位
⼀
般
是
mm
。
从
相
机
坐
标
系
到
图
像
坐
标
系
(
成
像
平
⾯
)
的
变
换
是
个
相
似
三
⻆
形
变
换
,
推
导
如
下
:
剩余10页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2024-05-14 上传
2021-08-14 上传
2019-01-03 上传
2021-03-03 上传
132 浏览量
点击了解资源详情

韩金虎
- 粉丝: 35
- 资源: 285
 我的内容管理
展开
我的内容管理
展开







最新资源
- 火炬连体网络在MNIST的2D嵌入实现示例
- Angular插件增强Application Insights JavaScript SDK功能
- 实时三维重建:InfiniTAM的ros驱动应用
- Spring与Mybatis整合的配置与实践
- Vozy前端技术测试深入体验与模板参考
- React应用实现语音转文字功能介绍
- PHPMailer-6.6.4: PHP邮件收发类库的详细介绍
- Felineboard:为猫主人设计的交互式仪表板
- PGRFileManager:功能强大的开源Ajax文件管理器
- Pytest-Html定制测试报告与源代码封装教程
- Angular开发与部署指南:从创建到测试
- BASIC-BINARY-IPC系统:进程间通信的非阻塞接口
- LTK3D: Common Lisp中的基础3D图形实现
- Timer-Counter-Lister:官方源代码及更新发布
- Galaxia REST API:面向地球问题的解决方案
- Node.js模块:随机动物实例教程与源码解析
