深度学习驱动的立体匹配与深度图获取技术
37 浏览量
更新于2024-08-29
2
收藏 756KB PDF 举报
"这篇研究论文探讨了基于深度学习的立体匹配和深度图采集算法,通过在Linux平台上利用Torch深度学习框架构建神经网络,改进传统算法来计算匹配成本函数,以此提高立体匹配的准确率。文章还介绍了如何通过不同的激活函数、批量归一化层等方法优化卷积神经网络结构,以降低错误匹配率,并利用后处理算法,包括匹配成本聚合、视差计算和视差细化,得到视差图和深度图。实验验证了算法的效果,并在Middlebury立体算法评估平台上进行了评估。"
本文深入研究了利用深度学习技术改进的立体匹配和深度图采集方法。传统的立体匹配算法通常依赖于手工设计的特征和匹配准则,而深度学习则能够自动学习图像中的复杂模式,从而提高匹配精度。作者采用Torch深度学习框架,这是一套广泛用于深度学习研究的开源工具,它提供了灵活的环境来构建和训练神经网络模型。
研究的核心是用卷积神经网络(CNN)替代传统的匹配成本计算方法。CNN在图像处理任务中展现出强大的表征学习能力,能有效地捕捉图像的局部和全局特征。为了进一步提升性能,论文提出了对CNN结构的改进,包括采用不同的激活函数(如ReLU或Leaky ReLU)以增加非线性表达能力,以及添加批量归一化层来加速训练过程并减少内部协变量漂移。
完成匹配成本计算后,后处理步骤至关重要。这些步骤包括匹配成本聚合,通过对不同路径的成本进行整合来确定最佳匹配;视差计算,通过找到最小成本路径来估计每个像素的深度;以及视差细化,通过平滑和修正潜在错误的视差估计来提高深度图的质量。
实验部分展示了算法的实际效果,通过与标准数据集上的结果对比,证明了所提算法的有效性。论文还利用Middlebury立体算法评估平台,这是一个广泛认可的立体视觉评估标准,对算法进行了量化评估,进一步验证了其在立体匹配和深度图生成方面的优越性能。
这篇论文为深度学习在立体匹配领域的应用提供了新的见解,对于推动计算机视觉、自动驾驶和机器人导航等领域的发展具有重要意义。通过深度学习优化的立体匹配算法不仅提高了匹配精度,还为实时和高精度的3D场景重建提供了可能。
Stereo Matching and Depth Map Collection
Algorithm Based on Deep Learning
Hao Xu
School of Instrumentation Science and Optoelectronics Engineering
Beihang University
Beijing, China
15101501309@163.com
Abstract—This paper elaborates the research on stereo
matching and depth map collection algorithm based on deep
learning, use the Torch deep learning framework based on Linux
platform to build neural network. The neural network refers to
open source algorithm to achieve the use of convolution neural
network instead of the traditional algorithm to calculate the
matching cost function. This paper also improves the structure of
the convolution neural network by using different activation
function and adding the batch normalization layer and other
methods, reducing the error matching rate, and then get the
disparity map and depth map by the post-processing algorithm
which includes the matching cost aggregation, disparity
computation, disparity refinement. Then the paper verified the
effect of the algorithm by experiment and analyzed the
experiment results, and used the Middlebury stereo algorithm
evaluation platform to evaluate the algorithm. And finally the
porposed algorithm gets better stereo matching effect than
before.
Keywords—Deep learning; Stereo matching; Convolution
neural network; Disparity map; Depth map
1. INTRODUCTION
Nowadays stereo matching technology has been widely
used in robot navigation, DoF rendering [1] and video process
[2,3,4]. Various algorithms were presented in recent year. And
many deep learning [5,6,7] methods applied to the field of
image research in recent years, especially the use of neural
network [8,9,10,11].
In this paper, matching cost is computed by adopting the
deep learning algorithm. Convolutional neural network [12]
has been developed rapidly and the architecture constructed
by J. Bontar and Yann LeCun [13] is the most popular at
present. They describe two network architectures for learning
a similarity measure on image patches. One work for the
accuracy of the matching, the other for speed. Both of them
achieved remarkable results.
In stereo vision, after capturing the left and right images
using the stereo camera and computing the disparity d, we can
compute the depth z using the following equation.
fB
z
d
=
(1)
where f denotes the focal distance, B denotes the distance
between the center of two cameras. This equation transforms
the problem of depth map calculation into the problem of
disparity map calculation.
Furthermore, this paper assumes that the two cameras only
differ in their horizontal locations in the binocular stereo
system. And this assumption can be implemented through
image polar line correction. We only consider the dense stereo
method which makes depth estimation for each pixel in the
image.
According to the work of Scharstein, the classic stereo
matching algorithm can be divided into four modules [14]:
matching cost computation, matching cost aggregation,
disparity computation, and disparity refinement. The last three
modules are called the post-processing algorithm. The next
section will concentrate on the computation of matching cost
using the convolutional neural network.
2. MATCHING COST COMPUTATION VIA
CONVOLUTIONAL NEURAL NETWORK
2.1 Neural network structure
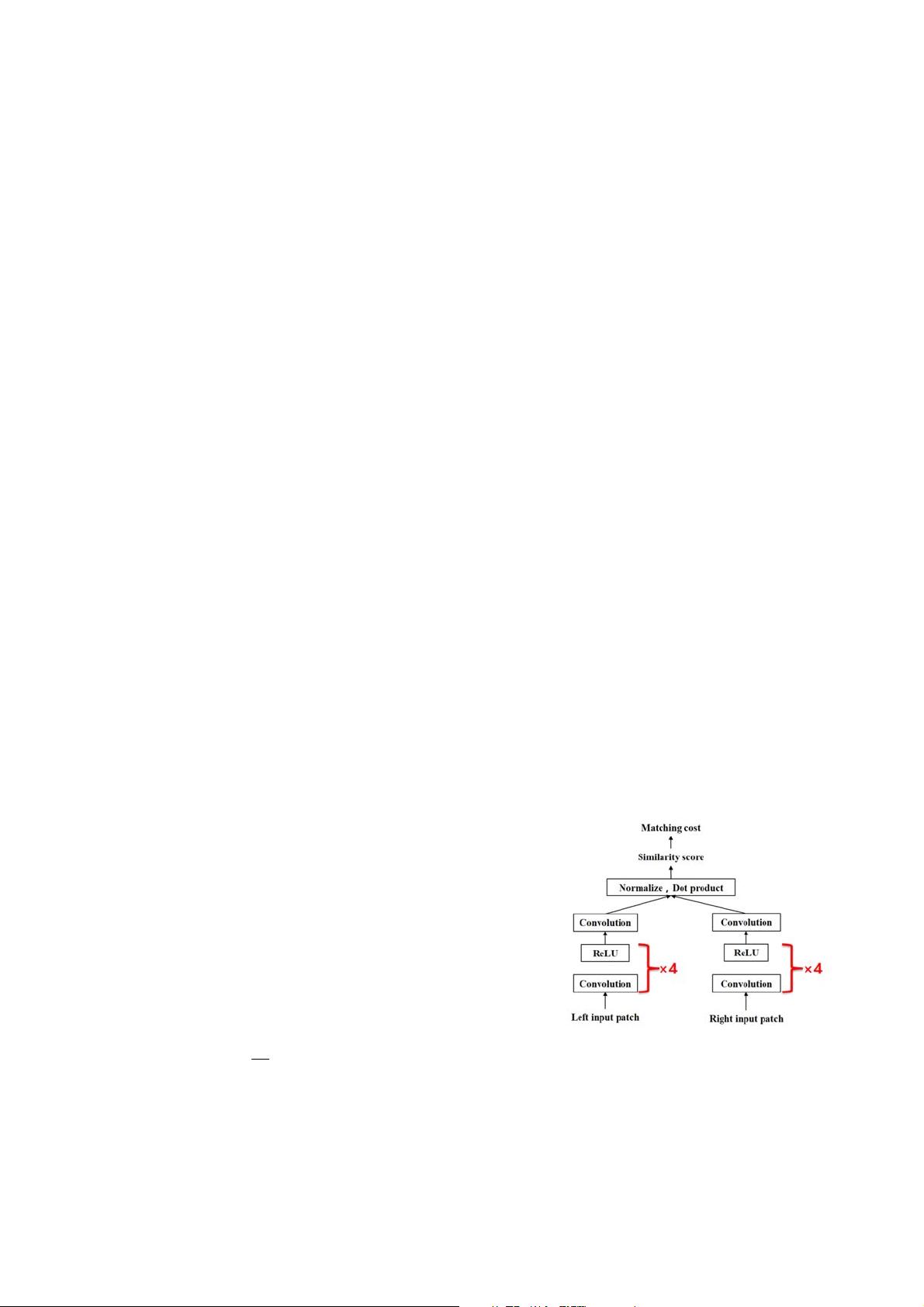
Motivated by mc-cnn-fst and mc-cnn-acrt algorithms in
[13], we adopt two structures (i.e. fast structure and accurate
structure) to learn similarity between image patches. In the
two structures, network input consists of a pair of tiny patches
and network output consists of the similarity score of the two
image patches.
Fig. 1 Fast network structure
The first structure refers to the fast structure, as shown in
Fig. 1.
978-1-5386-1620-8/17/$31.00 ©2017 IEEE
This full text paper was peer-reviewed at the direction of IEEE Instrumentation and Measurement Society prior to the acceptance and publication.
336
下载后可阅读完整内容,剩余5页未读,立即下载
点击了解资源详情
219 浏览量
240 浏览量
266 浏览量
2021-08-19 上传
2021-08-18 上传
2021-08-18 上传
2024-06-06 上传
195 浏览量

weixin_38581405
- 粉丝: 2
- 资源: 947
 我的内容管理
展开
我的内容管理
展开







最新资源
- 国王脚本
- BaseDesktopApp:电子+ Vue +元素=酷炫的桌面应用
- my_i2c.zip
- 媒体相关图标 .ai .svg .eps .png .psd素材下载
- modeshape-sequencer-xsd-3.6.1.Final.zip
- portfolio:网站充当投资组合
- react-native-translate:满足简单需求的简单包装
- hw1-lee2021
- yolov7训练自己的数据集+教程+二维码检测
- 响应式生活博客设计网站HTML5模板.zip
- .moc
- wordscrambler:另一个单词打乱游戏
- swagger-ui 压缩包
- 105℃长寿命小形品(5000小时)-铝电解电容器.zip
- StarCitizen-Helper:StarCitizen-Helper:Включениелокализации
- 与异常检测相关的书籍,论文,视频和工具箱-Python开发
