合作环境中的机器人意图识别:状态表示与推断
11 浏览量
更新于2024-06-18
收藏 23.45MB PDF 举报
"这篇博士学位论文来自勃艮第大学科技学院,作者是Craig Schlenooff,研究主题聚焦在合作人机环境中通过状态表示推断意图。论文的评审委员会由多位知名教授组成,包括Benoît Eynard、Bernard Grabot、Salima Hassas、Dominique Michelucci和Sebti Foufou,导师是Sebti Foufou教授。这篇论文旨在解决人机协作中的安全问题,尤其是在共享工作空间中的无缝合作。
论文指出,人类和机器人共同执行安全的协作任务是机器人技术的重要目标,这涵盖了从协作装配到物料处理等多种应用场景。现有的安全标准主要关注限制两者之间的物理接触,然而,这些标准缺乏对代理(人类)未来行为的预测能力。因此,论文提出了一个创新的意图识别方法,它不是基于传统的活动识别,而是通过识别和表示状态信息来推断代理的意图。
该方法利用区域连接演算(RCC-8)来分析环境中的状态关系,进而推理出整体状态。接着,通过贝叶斯方法关联这些状态与可能的意图,预测接下来可能的动作。论文通过对比实验数据验证了这种方法的有效性,结果表明,该算法在多数情况下能与人类表现相当,甚至更优。
简历部分再次强调了人机协作安全的重要性,指出机器人需要具备监控工作环境、理解人类意图以及预防潜在危险的能力。现有的合作标准虽然关注物理隔离,但忽略了对未来状态和任务相关信息的预测,而这正是本文研究的意图识别方法所弥补的。
这篇论文提出了一个基于状态表示的意图识别框架,为实现更安全、高效的合作人机环境提供了理论和技术支持。"
0
16
0
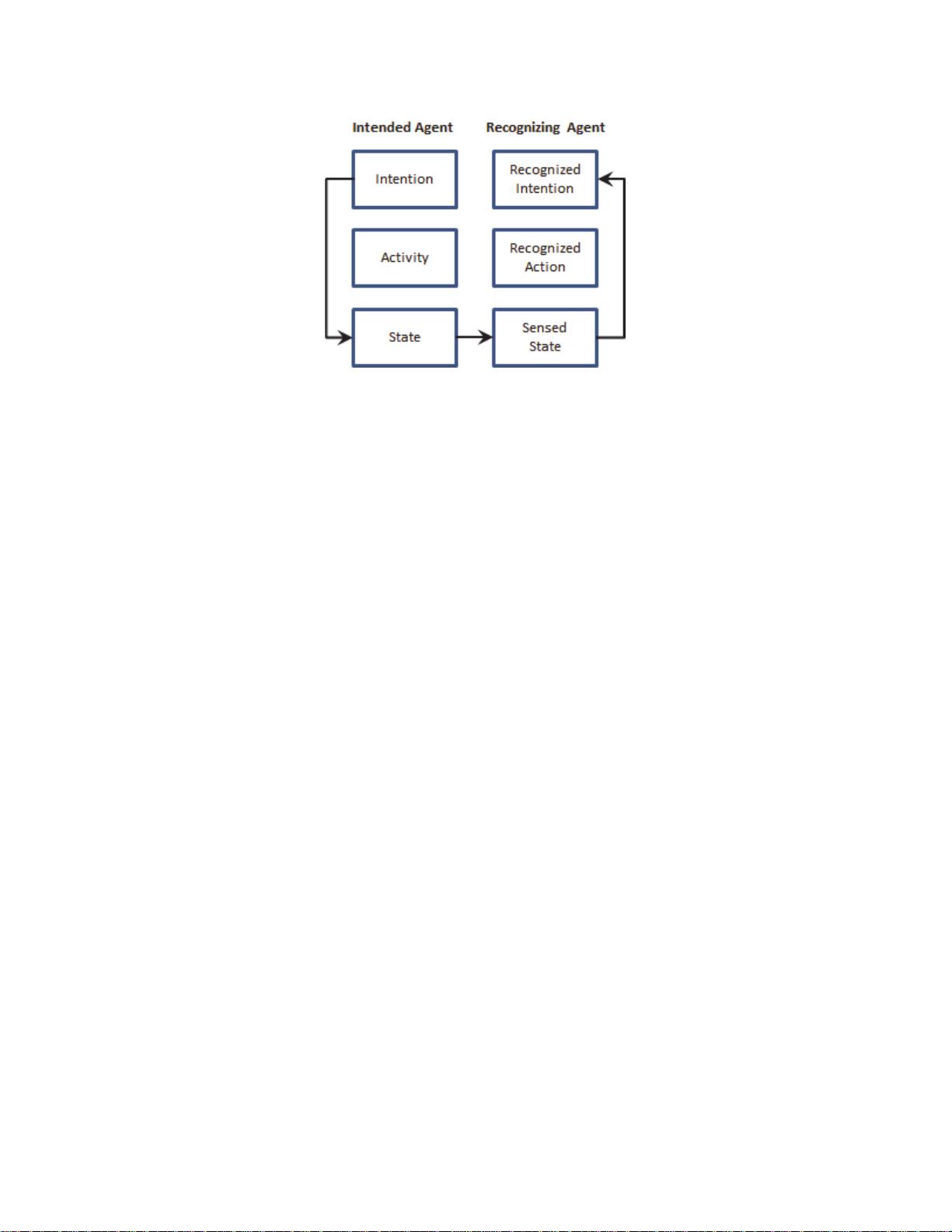
图2:意图识别的新路径
0
在本论文中,我们提出了一种新的意图识别结构,如图2所示。在这种方法中,我们关注
状态和意图之间的关系,而完全绕过了活动水平。直接基于状态的意图识别相对于基于活
动的识别具有一些有趣的优势,包括:
-
状态通常比动作更容易被传感器系统识别。正如[6]中所示并在下一章中讨论的那样,试图
识别环境的状态(对象的识别、位置和方向)的现有算法的性能比试图识别环境中正在执
行的活动的算法要好大约20%。因此,状态信息可以以更高的准确性提供给意图识别算法
作为输入,从而使算法的输出更好;
-
使用活动,意图识别通常仅限于推断单个人的意图。基于状态的意图识别消除了这个缺点
,因为状态的存在与创建它的人无关。在基于状态的方法中,多个人可以共同工作于同一
意图,因为算法不关注正在执行的活动,而只关注每个活动完成后所达到的状态;
-
状态信息往往比活动信息更普遍,从而允许本体的可重用性。例如,空间关系(如上方、
部分内部和接触)在多个领域中是通用的,而“将盒子放入工具托盘”可能只适用于制造
组装领域。
我们将状态与状态关系区分开来。在这个背景下,状态被定义为感兴趣区域中一个或多个
对象的一组属性。



剩余217页未读,继续阅读
2019-07-22 上传
点击了解资源详情
点击了解资源详情
2024-10-27 上传
2024-10-27 上传

cpongm
- 粉丝: 5
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++ Qt影院票务系统源码发布,代码稳定,高分毕业设计首选
- 纯CSS3实现逼真火焰手提灯动画效果
- Java编程基础课后练习答案解析
- typescript-atomizer: Atom 插件实现 TypeScript 语言与工具支持
- 51单片机项目源码分享:课程设计与毕设实践
- Qt画图程序实战:多文档与单文档示例解析
- 全屏H5圆圈缩放矩阵动画背景特效实现
- C#实现的手机触摸板服务端应用
- 数据结构与算法学习资源压缩包介绍
- stream-notifier: 简化Node.js流错误与成功通知方案
- 网页表格选择导出Excel的jQuery实例教程
- Prj19购物车系统项目压缩包解析
- 数据结构与算法学习实践指南
- Qt5实现A*寻路算法:结合C++和GUI
- terser-brunch:现代JavaScript文件压缩工具
- 掌握Power BI导出明细数据的操作指南
