机器人定位技术:MATLAB实现基础算法
需积分: 9 145 浏览量
更新于2024-07-19
1
收藏 7.05MB PDF 举报
“Robotics__Vision_and_Control_Fundamental_Algorithms_in_MATLAB英文版06 - 机器人定位”
在机器人技术领域,定位是至关重要的一个环节,它涉及到机器人知道自己在哪里以及如何到达目的地的能力。本章节“Localization”专注于讨论机器人定位的各种方法和技术。正如标题所示,这出自于机器人大师Peter Corke的作品,书中不仅涵盖了工业机器人、移动机器人和飞行器等各类机器人的基础知识,还深入探讨了机器视觉、机器人控制和相关算法,并提供了MATLAB机器人工具箱和机器视觉工具箱的实践代码,为学习者提供了一个全面且深入的机器人研究平台。
定位(Localization)是机器人自主导航的基础。如描述中提到的航海中的例子,通过航速测量和航向估计,我们可以推算出当前位置,这种方法称为“dead reckoning”。在机器人领域,这通常涉及到使用轮速传感器、陀螺仪和其他传感器来估算机器人自上次已知位置以来的移动距离和方向。
然而,死计算法存在累积误差的问题,随着时间的推移,定位的精度会逐渐降低。因此,机器人定位技术通常结合其他方法,例如:
1. **全球定位系统 (GPS)**:在户外环境中,GPS是最常见的定位方式,它能提供高精度的三维位置信息。但在室内或GPS信号受阻的环境下,就需要寻找替代方案。
2. **视觉定位**:利用摄像头捕获的图像信息,通过特征匹配、SLAM(Simultaneous Localization and Mapping,同时定位与建图)等技术进行定位。这是机器视觉领域的重要应用,能够帮助机器人在未知环境中建立地图并自我定位。
3. **无线通信信号**:Wi-Fi、蓝牙或其他无线信号的强度可以作为定位的依据,这种方法称为RFID或信标定位。
4. **惯性测量单元 (IMU)**:包括陀螺仪和加速度计,它们可以连续监测机器人的运动状态,但需要通过卡尔曼滤波等算法来校正漂移。
5. **激光雷达 (LiDAR)**:通过扫描周围环境并计算反射时间,LiDAR可以提供精确的距离数据,用于实时定位和避障。
6. **声纳和超声波**:类似海洋生物的回声定位,这些传感器发射声波并接收回波,计算距离以确定位置。
在MATLAB环境中,有专门的工具箱支持这些定位算法的实现和测试,包括机器人工具箱和机器视觉工具箱。学习者可以通过编写和运行实例代码,理解并掌握这些算法的工作原理和实际应用。
本章节深入剖析了机器人定位的各种技术和挑战,对于希望进入机器人学领域的学习者,特别是对MATLAB编程感兴趣的读者,这是一个宝贵的资源,可以帮助他们建立起扎实的理论基础和实践经验。
111
6.1
l
Dead Reckoning
Dead reckoning is the estimation of a robot’s location based on its estimated speed,
direction and time of travel with respect to a previous estimate.
6.1.1
l
Modeling the Vehicle
The first step in estimating the robot’s position is to write a function, f(·), that describes
how the vehicle’s configuration changes from one time step to the next. A vehicle model
such as Eq. 4.2 describes the evolution of the robot’s configuration as a function of its
control inputs, however for real robots we rarely have access to these control inputs. Most
robotic platforms have proprietary motion control systems that accept motion commands
from the user (speed and direction) and report odometry information.
An odometer is a sensor that measures distance travelled, typically by measuring
the angular rotation of the wheels. The direction of travel can be measured using an
electronic compass, or the change in heading can be measured using a gyroscope or
differential odometry.
These sensors are imperfect due to systematic errors such an
incorrect wheel radius or gyroscope bias, and random errors such as slip between
wheels and the ground, or the effect of turning.
We consider odometry to comprise
both distance and heading information.
Instead of using Eq. 4.2 directly we will write a discrete-time model for the evolu-
tion of configuration based on odometry where δ
hki= (δ
d
, δ
θ
) is the distance travelled
and change in heading over the preceding interval, and k is the time step. The initial
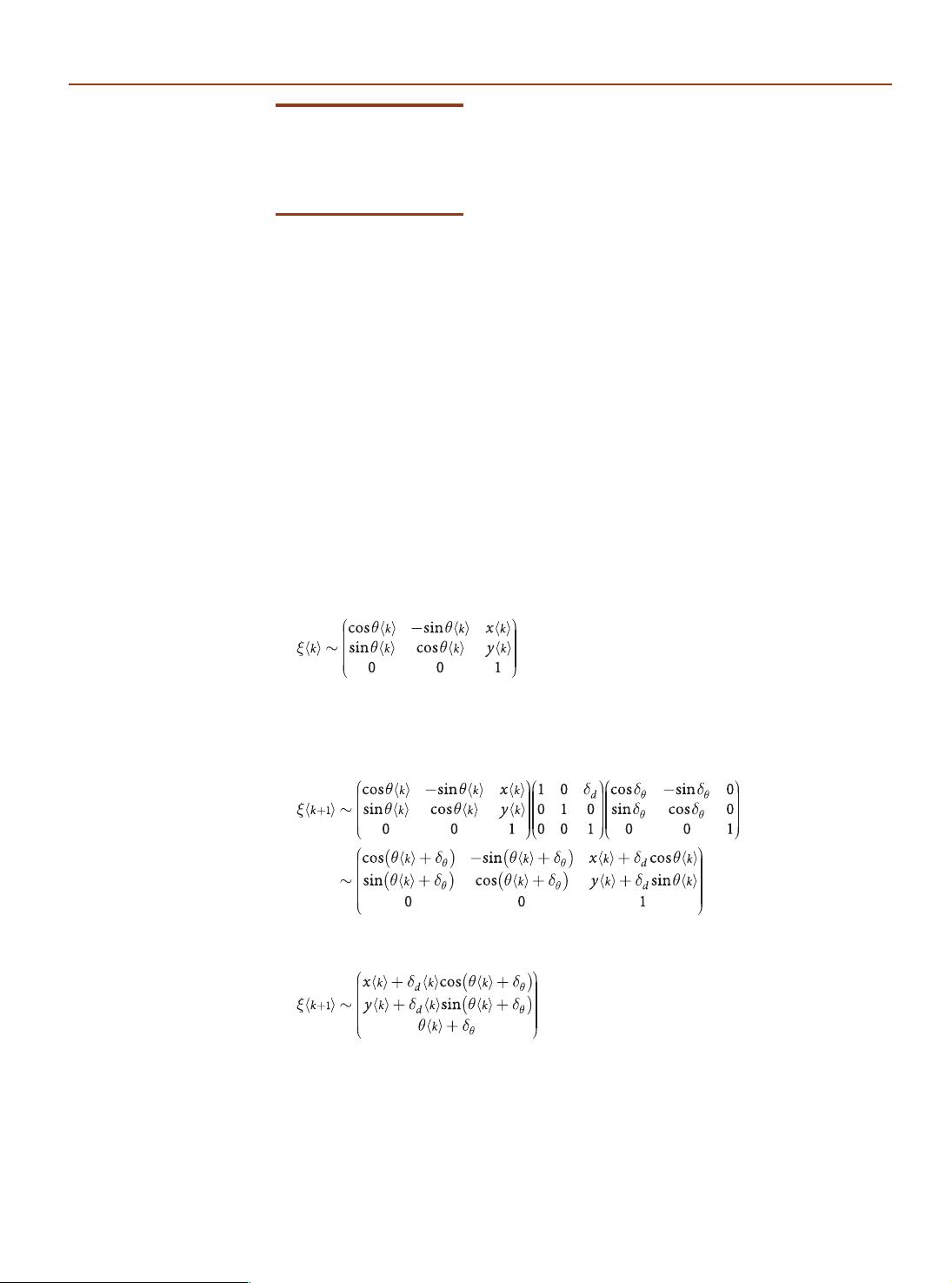
pose is represented in SE(2) as
We assume that motion over the time interval is small so the order of applying the
displacements is not significant. We choose to move forward in the vehicle x-direction
by δ
d
, and then rotate by δ
θ
giving the new configuration
or as a 3-vector
(6.1)
which gives the new configuration in terms of the previous configuration and the
odometry.
However this assumes that odometry is perfect, which is not realistic. To model
the error in odometry we add continuous random variables v
d
and v
θ
to δ
d
and δ
θ
respectively. The robot’s configuration at the next time step, including the odometry
error, is
Measuring the difference in angular ve-
locity of a left- and right-hand side wheel.
When turning, the outside wheel trav-
els faster than the inside wheel, and this
can be accounted for by measuring the
speed of both wheels.
6.1 · Dead Reckoning
剩余24页未读,继续阅读
2014-11-05 上传
2017-12-23 上传
2017-12-23 上传
2018-03-06 上传
2018-03-06 上传
2017-12-23 上传
2018-03-06 上传
2018-03-06 上传
2017-12-23 上传

qq_14903801
- 粉丝: 5
- 资源: 25
 我的内容管理
展开
我的内容管理
展开







最新资源
- WordPress作为新闻管理面板的实现指南
- NPC_Generator:使用Ruby打造的游戏角色生成器
- MATLAB实现变邻域搜索算法源码解析
- 探索C++并行编程:使用INTEL TBB的项目实践
- 玫枫跟打器:网页版五笔打字工具,提升macOS打字效率
- 萨尔塔·阿萨尔·希塔斯:SATINDER项目解析
- 掌握变邻域搜索算法:MATLAB代码实践
- saaraansh: 简化法律文档,打破语言障碍的智能应用
- 探索牛角交友盲盒系统:PHP开源交友平台的新选择
- 探索Nullfactory-SSRSExtensions: 强化SQL Server报告服务
- Lotide:一套JavaScript实用工具库的深度解析
- 利用Aurelia 2脚手架搭建新项目的快速指南
- 变邻域搜索算法Matlab实现教程
- 实战指南:构建高效ES+Redis+MySQL架构解决方案
- GitHub Pages入门模板快速启动指南
- NeonClock遗产版:包名更迭与应用更新
