CAN与CAN-FD:车载通信协议的演进
需积分: 16 154 浏览量
更新于2024-07-09
收藏 4.44MB PPTX 举报
本文档是关于CAN和CAN-FD总线技术的介绍,主要涵盖了CAN的基本概念、发展历程、优势以及CAN-FD的引入背景和基本原理。CAN总线由德国博世公司为解决汽车电子控制单元间的通信问题而设计,随着汽车电子化程度的提高,对总线性能需求不断提升,导致了CAN-FD(CAN with Flexible Data-rate)的出现,以提高数据传输速率和带宽。
CAN概述:
CAN(Controller Area Network)是一种串行通信协议,最初由博世公司于20世纪80年代开发,旨在简化汽车内部电子控制单元(ECU)间的通信。CAN协议以其高可靠性、实时性和灵活性著称,逐渐成为汽车电子行业的标准。随着时间的推移,CAN技术经历了多个发展阶段,包括1991年的CAN2.0标准发布,分为A和B两部分,以及后续的ISO 11898国际标准制定。
CAN的发展:
自1983年博世开始研究CAN总线系统以来,CAN在汽车领域的应用日益普及。1991年,Benz S系列成为首个采用CAN总线的轿车,随后CAN被广泛应用到各类车辆,包括卡车、巴士和轿车,如Maybach和VW Golf。CAN的快速发展得益于其在降低线束复杂性、提高数据传输效率和降低成本等方面的优点。
CAN的优势:
CAN总线的主要优势在于其强大的错误检测和恢复能力,支持多主站通信,允许多个设备同时发送数据。此外,CAN总线的实时性使其能够快速响应关键系统的指令,确保汽车安全。由于这些特性,CAN在汽车电子系统、工业自动化、医疗设备、楼宇自动化等多个领域都有广泛应用。
CAN-FD简介:
随着汽车电子化和智能化的发展,传统CAN的1MBit/s最大传输速率已无法满足需求。为了解决这一问题,BOSCH推出了CAN-FD,它扩展了CAN协议,允许数据段速率提高至最高5MBit/s,有效提升了总线的带宽。CAN-FD通过延长数据帧长度和提高数据速率,显著提高了通信效率,缩小了与FlexRay等高速总线之间的性能差距。
CAN协议/报文:
CAN协议定义了两种帧类型:数据帧和远程帧。数据帧用于传输实际数据,包含标识符(ID)、数据长度码(DLC)和数据字段。远程帧则用于请求其他节点发送特定数据。CAN报文通过仲裁、错误检测和错误处理机制确保数据的正确传输。
CAN总线的分类及特征:
根据应用场景和传输速率,CAN总线可分为不同的类别,如Class A(低速CAN)适用于车内局部通信,Class B(高速CAN)用于更高速的数据传输。CAN-FD的引入进一步扩展了这些分类,提供了更高效的数据传输能力。
总结:
CAN和CAN-FD是汽车网络中的关键技术,它们为汽车电子系统间的高效通信提供了基础。随着汽车行业的不断发展,对车载通信的需求不断增长,CAN-FD作为CAN的升级版,将在未来继续扮演重要角色,推动汽车电子系统的创新和进步。
11
CAN 概述
CAN 的发展
CAN 的应用
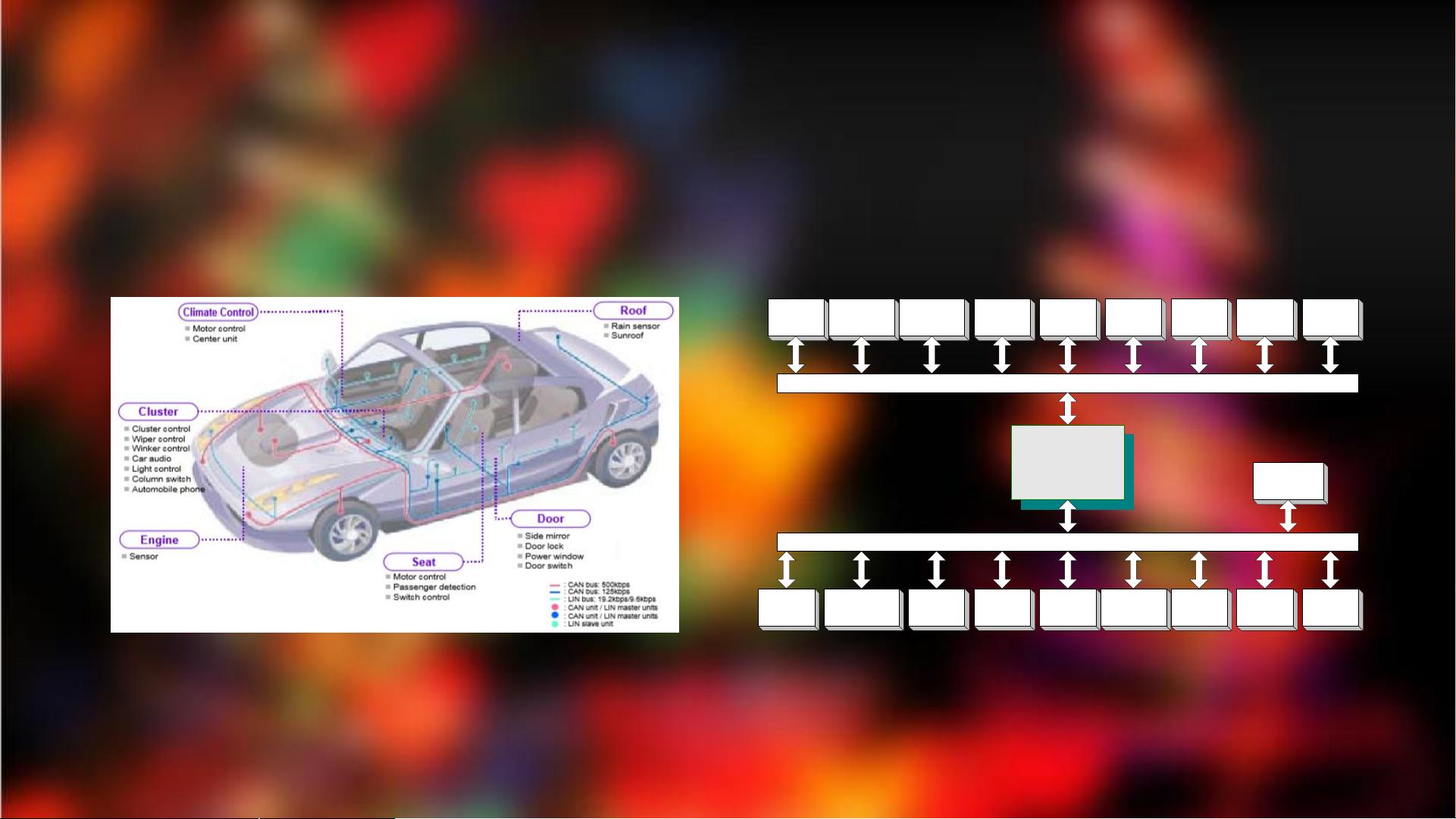
CAN 的应用示例
发动机
ECU
自动变
ECU速器
ABS/ TCS
ECU
安全气
ECU囊
电控悬
ECU架
巡航控
ECU制
动力转
ECU向
电机控
ECU制
电池管
ECU理
灯光控
ECU制
刮雨洗涤
ECU控制
电动座
ECU椅
门锁防
ECU盗
电动车
ECU窗
后视镜
ECU喇叭
气候控
ECU制
警告信
ECU号
仪表显
ECU示
整车控制器
ECU(网关)
整车控制器
ECU(网关)
高速总线
低速总线
故障诊断
ECU

剩余63页未读,继续阅读
2023-12-20 上传
2020-08-27 上传
2023-12-20 上传
2021-10-27 上传
2021-03-02 上传
2021-02-08 上传
2023-06-09 上传
2023-12-20 上传
2021-06-07 上传

select_emp
- 粉丝: 1
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 基于EVA的薪酬激励体系的改进研究.PDF
- FTP下载和几个实用的方法
- 三层架构的原理及用意
- Asp.Net为用户控件添加属性和事件
- Professional Microsoft Search SharePoint 2007 and Search Server 2008-0470279338.pdf
- 管理层激励机制优化设计.PDF
- 成败型一次抽样检验方案算法的等价变形.pdf
- 层次分析法在项目风险管理中的应用.pdf
- 层次分析法.pdf层次分析法.pdf
- C#设计模式还算可以
- 使用标准GDI实现游戏品质的动画系统
- div+Css布局大全
- oralce 自我学习资料
- ArcGIS Engine 开发指南
- JBPM用户实用指南
- GDI++SDK参考
