




室内双目视觉SLAM技术:家庭服务机器人的关键技术
需积分: 0 11 浏览量
更新于2024-06-29
2
收藏 4.18MB PDF 举报
室内移动机器人双目视觉SLAM(Simultaneous Localization and Mapping,同时定位与地图构建)方法是当前家庭服务机器人领域中的关键技术,尤其在老龄化社会中,由于机器人在提供家庭护理、助老助残等方面的需求增加,其自主导航和环境理解能力显得尤为重要。这篇硕士研究生论文由郭文县撰写,其导师为张智副研究员,专业背景为控制科学与工程。
该研究的重点在于解决室内环境中移动机器人的自主导航问题,通过双目视觉系统实现精确的定位和环境建图。双目视觉SLAM利用两台相机同时获取深度信息,通过对左右视差图像的匹配和融合,不仅可以实时更新机器人自身的位置,还能构建出环境的三维地图。这种技术对于避免碰撞、规划路径以及理解复杂室内布局至关重要。
论文的工作流程可能包括以下几个步骤:
1. **视觉传感器处理**:双目相机采集到的图像首先经过校准和特征提取,以便后续的深度估计和匹配。
2. **特征匹配与跟踪**:通过特征匹配算法(如SIFT、ORB或ORB-SLAM)找出图像之间的对应关系,形成视觉键点和对应关系。
3. **深度计算**:基于视差测量,通过三角测量计算出每一点的三维坐标,更新机器人位置和环境地图。
4. **SLAM算法**:通过优化算法(如粒子滤波、扩展卡尔曼滤波或图优化)整合传感器数据,实时更新机器人状态和环境地图,同时解决局部最优和全局一致性的挑战。
5. **误差校正**:对地图进行持续的更新和优化,以确保长期的定位精度和地图的准确性。
郭文县在论文提交于2017年1月,并于同年3月进行了论文答辩,最终获得了哈尔滨工程大学的工学硕士学位。此研究不仅展示了作者对双目视觉SLAM原理的深入理解,也体现了其在实际应用中的创新与实践能力。整个研究过程中,遵循了学位论文的原创性声明,保证了所有工作都是独立完成,并正确引用了相关文献,尊重学术界的知识积累。
第 1 章 绪论
1
第 1 章 绪论
1.1 研究背景和意义
机器人是现代科技发展的重要成果,它由诸多知识学科组成,包括了机械设计,软
件技术、自动控制、智能算法等领域的最新成果
[1-2]
,代表了机电一体化和自动化技术的
最高成就。如今,机器人的发展经历了三个阶段,第一个阶段具有代表性的是再现型机
器人,第二阶段的机器人已经能对外部环境进行智能感知,机器人发展到第三阶段,市
场上已经出现各种智能机器人,而家庭服务机器人就是第三代机器人的典型代表
[3]
,我国
60岁以上的人口已经超过16%,预计到2021年全国老年人口总数将达到3亿人以上,人口
老龄化问题将称为中国面临的前所未有的新挑战,老年人和残疾的将成为社会的一个重
要负担。服务机器人在生活上帮助人们,能够改善和提高人们的生活质量,在人类的生
活中扮演着越来越重要的角色
[4]
。
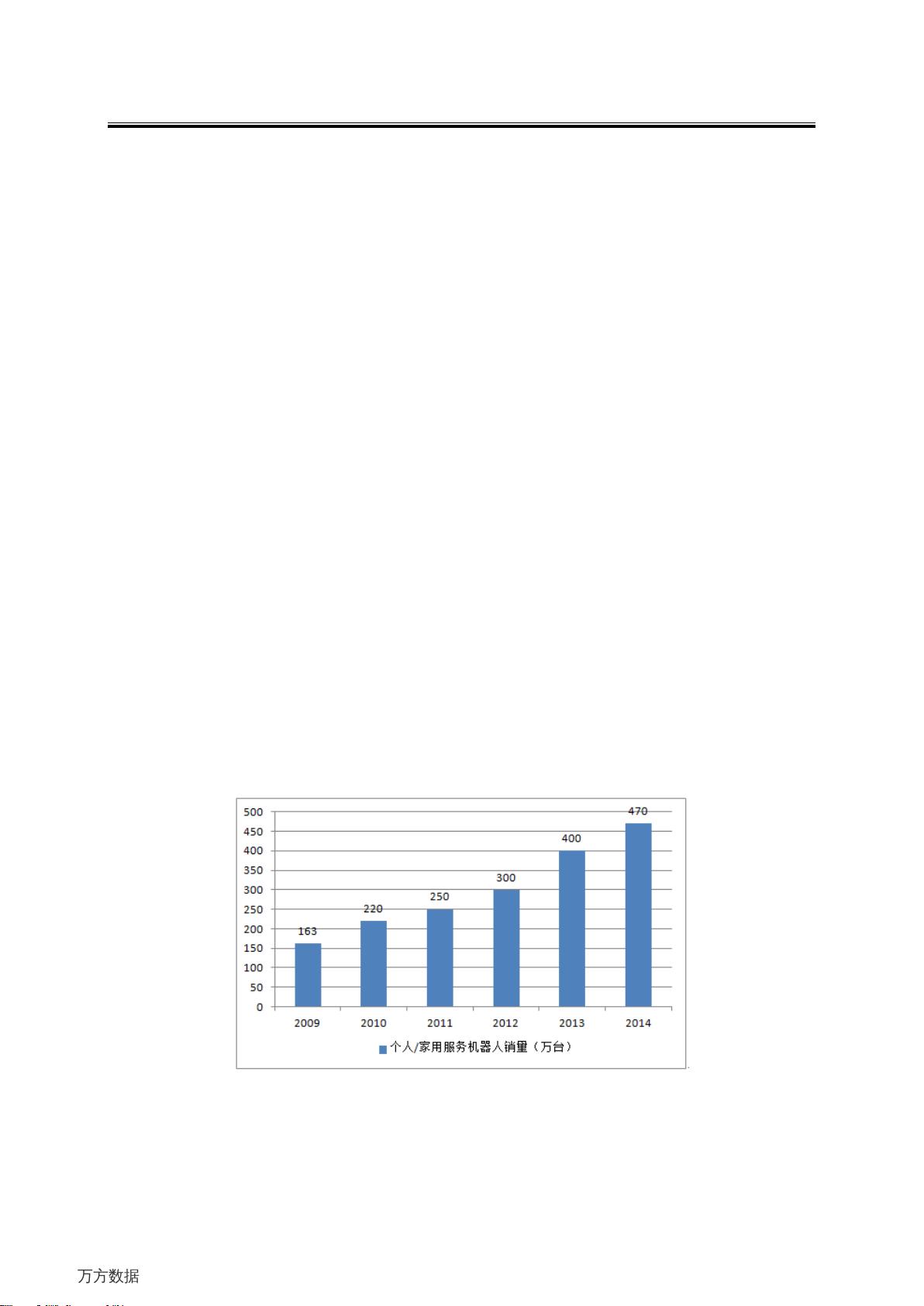
据统计,2012 年全球个人/家用服务机器人销量约为 300 万台,较 2011 年增长 20%,
销售额为 12.21 亿美元;2014 年全球个人/家用服务机器人销量约为 470 万台,较 2013
年增长 17.50%,销售额约为 22.5 亿美元。2014 年全球个人/家用服务机器人销量约为
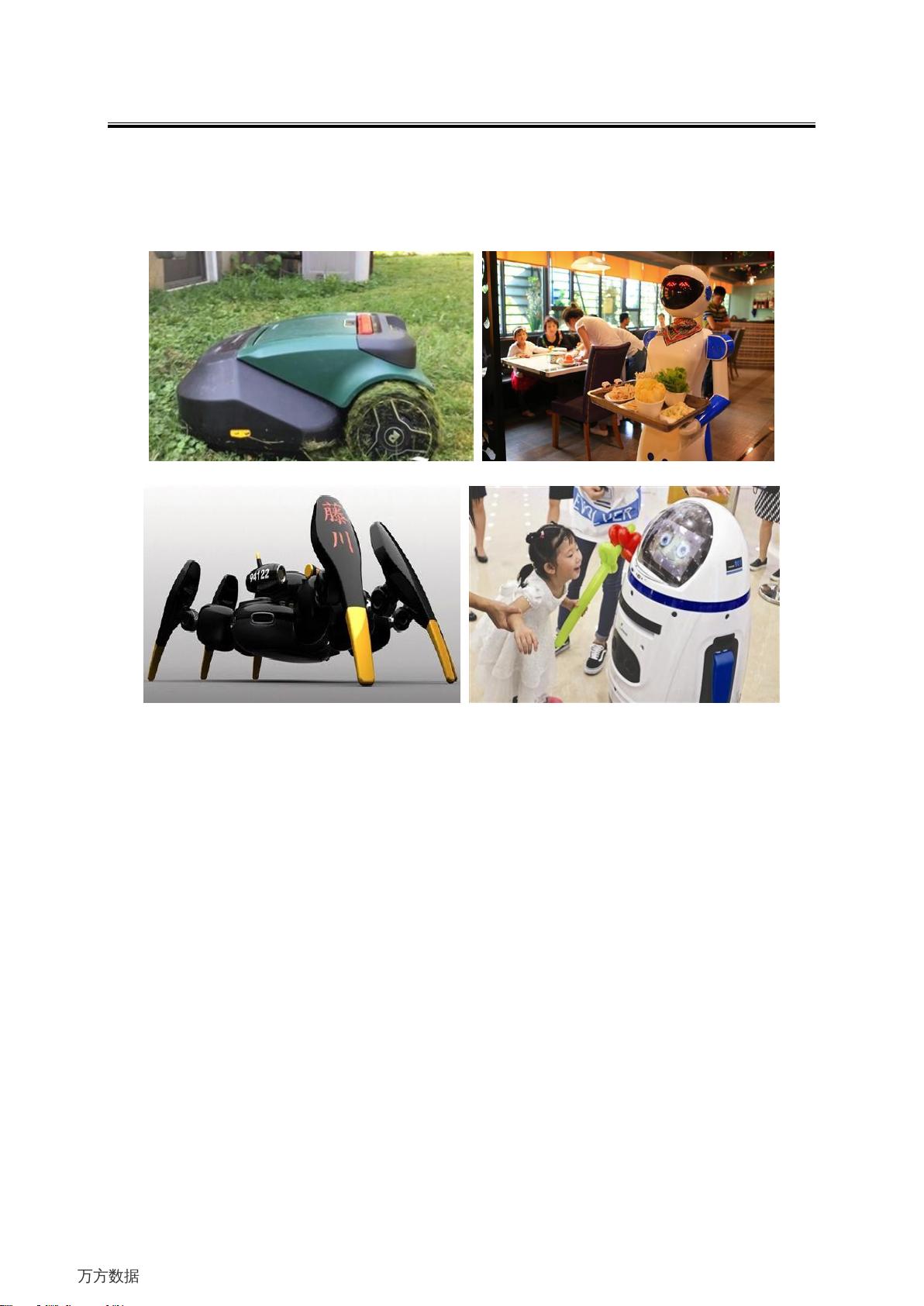
470 万台,较 2013 年增长 17.50%。其中,家务机器人(主要包括清洁机器人、除草机
器人等)的销量约为 270 万台,销售额约为 7.99 亿美元。娱乐休闲机器人(主要包括宠
物机器人、辅助健身机器人、聊天器人等)销量约为 120 万台;销售额约为 9.11 亿美元。
根据估计,在接下来的三年当中,世界的
/个人 家庭用服务机器人
的总销量将超过 2590
万台,
122市场规模高达到 亿美元
,超过 2014 年市场规模的 5 倍
[5]
。
2009 年以来全球个人/家用服务机器销量(单位:万台)
图1.1 2009-2014年全球服务型机器人销量统计
家庭服务机器人的研究和发展成为了现代国家科学技术创新和高端生产力水平的
万方数据



剩余92页未读,继续阅读
130 浏览量
180 浏览量
152 浏览量
238 浏览量
2021-09-19 上传
151 浏览量
138 浏览量
1077 浏览量
238 浏览量

生活教会我们
- 粉丝: 33
 我的内容管理
展开
我的内容管理
展开








最新资源
- 深入浅出:《单片机C语言编程与实例》代码解析
- Android开发必备工具Antguide教程解析
- 密码学大作业:AES、SHA3与RSA算法的实现解析
- eWebEditor5.5:支持本地Word图片自动上传的文本编辑器
- 龙与地下城角色创建助手:DungeonsAndDragonsHelper应用程序解析
- CDT规约数据解析与文件写入操作指南
- 全面支持中英双语的ASP.NET外贸网站源码
- 基于ActionBarSherlock和SlidingMenu的BaiduMap集成教程
- 微信JS-SDK信息获取与分享测试成功
- 数字时钟与温度自切换显示程序设计
- Java实现网络抓包技术详解
- Protel 99SE电子线路CAD教程详解
- Flash炫丽光源变幻教程及源文件分享
- Android圆形图片控件CircleImageView的自定义使用
- CF微服务架构下的Go语言应用实践
- 深入探讨smali文件与Java代码的反编译对比分析






















