噪声校准提升信号检测的延迟相关性和SNR壁垒
需积分: 9 8 浏览量
更新于2024-10-27
收藏 437KB PDF 举报
本文探讨了在不确定的低信号噪声比(Signal-to-Noise Ratio, SNR)环境下,如何实现信号检测的鲁棒性问题。之前的研究已经揭示了一个关键事实,即存在称为SNR墙的固有阈值,当SNR低于这个阈值时,稳健的信号检测变得几乎不可能。研究重点集中在窄带带通滤波器(narrowband pilot signals)上的噪声校准延迟相关相干性和SNR墙。
作者Rahul Tandra和Anant Sahai,分别来自加州大学伯克利分校电气工程与计算机科学系,他们在早期的工作中提出了一种名为运行时噪声校准的方法,这是对匹配滤波器的一种简单但有效的改进。这种方法通过实时估计和补偿背景噪声,显著提高了信号检测的鲁棒性,特别是在SNR较低的条件下。
在这篇新论文中,他们扩展了这一技术的应用范围,不仅限于窄带带通滤波器,而是将其推广到其他特征检测器上。以50%占空比的脉冲幅度调制(Pulse Amplitude Modulation, PAM)信号为例,作者展示了噪声校准技术在此类信号检测中的实际效果和提升作用。
通过分析这个例子,论文揭示了噪声校准在改善信号检测性能方面的关键作用,特别是在克服SNR墙方面。这些研究结果提供了深入理解,即如何通过实时噪声管理策略来增强信号处理系统的抗干扰能力,这对于通信、信号处理和无线传感器网络等领域的设计者来说具有重要的指导意义。此外,论文可能还讨论了噪声校准的实施细节、计算复杂度与资源消耗,以及如何在实际应用中优化算法以平衡鲁棒性和效率。本文是信号检测领域的一项重要贡献,对提升在复杂环境下的信号识别能力具有深远的影响。
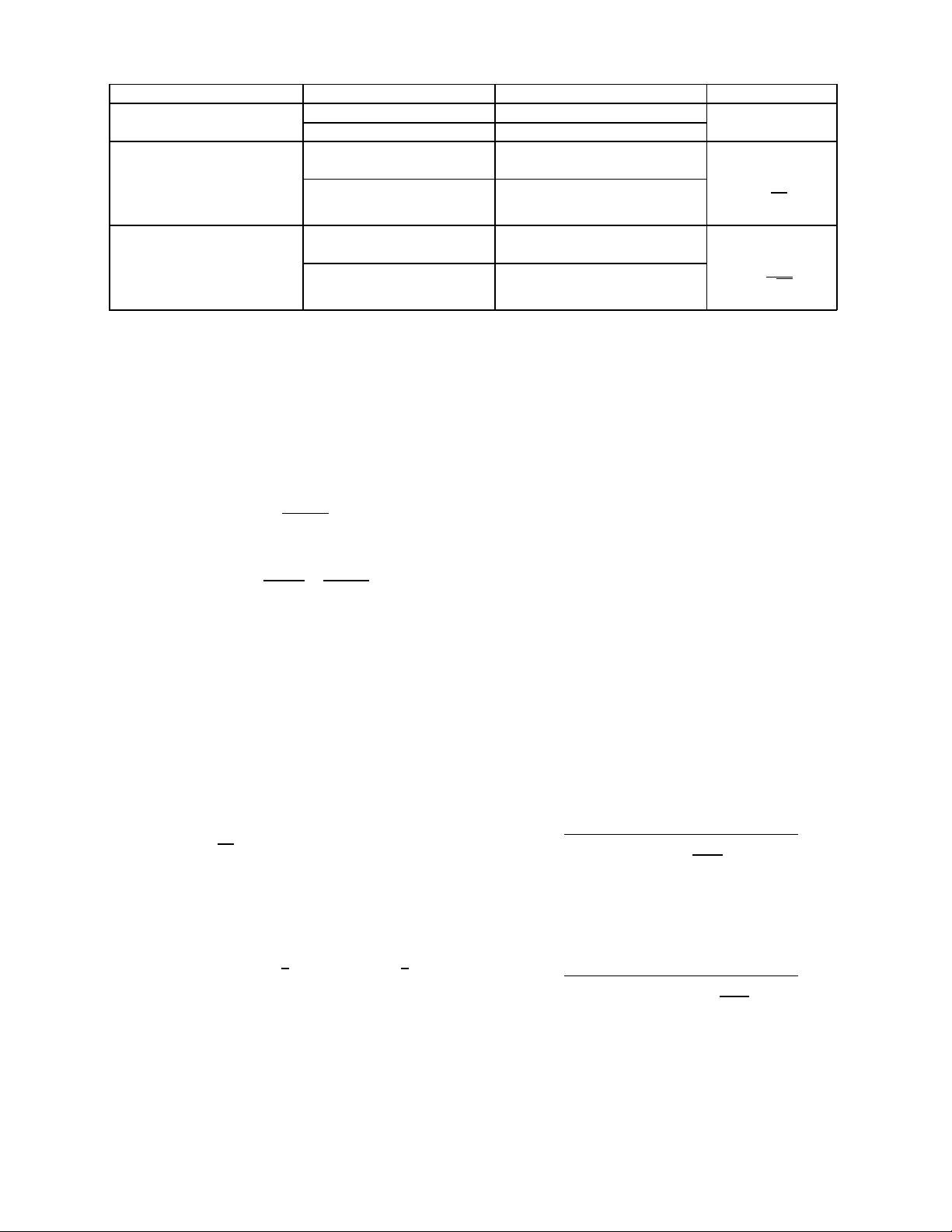
Signal model Strategy Key reason for non-robustness SNR wall scaling
Unknown or ‘white’ signal Energy detection Uncertain noise power O(1)
with a power constraint Optimal detection Uncertain noise moments
‘White’ signal with Matched filter Finite phase-coheren ce time
and uncertain noise power
narrowband pilot Matched filter with Finite phase-coheren ce time O
³
1
N
c
´
run-tim e noise calibration and uncertain noise color
50%-duty-cycle pulse Detector defined in (12) Finite delay-coherence time
amplitude modulated signal and uncertain noise power
(exa mple of a Detector defined in (16) Finite delay-coherence time O
³
1
√
D
c
´
cyclostationary signal) (run-time noise calibration) and uncertain noise color
TABLE I
COMPARISON OF ROBUSTNESS RESULTS FOR DIFFERENT CLASSES OF SIGNAL MODELS.
which robust detection
1
is impossible [4]. The SNR wall
expressions for the radiometer and the matched filter are
SNR
energy
wall
=
ρ
2
− 1
ρ
, (2)
and
SNR
mf
wall
=
1
N
c
· θ
µ
ρ
2
− 1
ρ
¶
, (3)
where θ is the fraction of the total signal power allocated
to the known pilot tone, and N
c
is the phase-coherence
time of the channel.
We no w give an alternate interpretation for SNR
walls using the notion of sample complexity. Consider
the robust detection problem in (1). Assume that the
signal and noise samples are independent and identically
distributed (iid), and the noise distribution lies in the
white noise uncertainty set W
ρ
. Let the detector test-
statistic be giv en by
T (Y):=
1
N
N
X
n=1
φ(Y [n])
H
1
≷
H
0
γ, (4)
where φ(·) is a known deterministic function and γ is the
detector threshold. Denote the SNR wall for this detector
by SNR
T
wall
.LetSNR > SNR
T
wall
. Then, by the
definition of an SNR wall (see [4] for a formal definition)
we know that any P
FA
<
1
2
and P
MD
<
1
2
can be
robustly achieved. That is, we can choose a detection
threshold γ such that
P
FA
=max
W∈W
ρ
P
W
(T (Y) >γ|H
0
) ,
P
MD
=max
W∈W
ρ
P
W
(T (Y) <γ|H
1
) . (5)
1
See [4] for a formal definition of robust detection.
Eliminating γ from (5) we can solve for N as a function
of the SNR, P
FA
, P
MD
and ρ. Hence, we can write
N = µ(SNR, P
FA
,P
MD
,ρ). (6)
This is called the sample complexity of the detector. For
any reasonable detector the sample complexity increases
as the SNR decreases, i.e., µ(SNR, P
FA
,P
MD
,ρ) is a
monotonically decreasing function of SNR. Under this
monotonicity assumption, it t urns out that
lim
SNR↓SNR
T
wall
µ(SNR,P
FA
,P
MD
,ρ)=∞. (7)
Equation (7) gives an alternate interpretation for an
SNR wall. It tells us that the SNR wall for a detector
is the SNR threshold at which the sample complexity
approaches ∞.
From [4] the sample complexity of the radiometer is
N ≈
2[Q
−1
(P
FA
) − Q
−1
(1 − P
MD
)]
2
h
SNR −
³
ρ
2
−1
ρ
´i
2
, (8)
where Q
−1
(·) is the inverse of the Gaussian tail prob-
ability function. Again from [4], the sample complexity
for the matched filter is
N ≈
2[Q
−1
(P
FA
) − Q
−1
(1 − P
MD
)]
2
h
θ · N
c
· SNR −
³
ρ
2
−1
ρ
´i
2
, (9)
Clearly (8) and (9) verify the assertion made in (7).
Figure 2 plots the sample complexity of the radiometer
and the matched filter . From the figureitiseasytosee
that the sample complexity curves go to infinity as the
SNR decreases to the SNR wall.
剩余10页未读,继续阅读
239 浏览量
199 浏览量
186 浏览量
309 浏览量
1145 浏览量
2024-10-26 上传
2025-01-16 上传
156 浏览量
108 浏览量

meixiaoguang
- 粉丝: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- C#实现程序A的监控启动机制
- Delphi与C#交互加密解密技术实现与源码分析
- 高效财务发票管理软件
- VC6.0编程实现删除磁盘空白文件夹工具
- w5x00-master.zip压缩包解析:W5200/W5500系列Linux驱动程序
- 数字通信经典教材第五版及其答案分享
- Extjs多表头设计与实现技巧
- VBA压缩包子技术未来展望
- 精选多类型导航菜单,总有您钟爱的一款
- 局域网聊天新途径:Android平台UDP技术实现
- 深入浅出神经网络模式识别与实践教程
- Junit测试实例分享:纯Java与SSH框架案例
- jquery xslider插件实现图片的流畅自动及按钮控制滚动
- MVC架构下的图书馆管理系统开发指南
- 里昂理工学院RecruteSup项目:第5年实践与Java技术整合
- iOS 13.2真机调试包使用指南及安装
