ROS驱动的上肢外骨骼康复机器人控制:自适应算法与系统集成
版权申诉
该篇硕士学位论文聚焦于"基于ROS的上肢外骨骼康复机器人的控制系统研究"。随着中国脑卒中患者数量的逐年增长,传统的康复训练方式由医生手动指导,难以满足大规模患者的个性化需求且劳动强度大。为此,作者提出了利用上肢外骨骼康复机器人进行辅助康复训练的创新思路。
论文首先概述了康复机器人在脑卒中康复中的重要性,强调了现有康复训练方法的局限性,如依赖于医师经验和个体差异明显。研究的目标是通过ROS(Robot Operating System,机器人操作系统)系统来设计一个智能控制系统,该系统能够实时监控机器人的运动状态,实现康复动作的精确设计、执行和数据分析,从而支持定制化的康复训练计划。
研究内容深入到硬件层面,对国内外上肢外骨骼康复机器人的研究进展进行了详尽分析,包括康复机器人所需的功能特性、技术差异化以及人体尺寸在康复设计中的考虑。此外,论文还详细讨论了康复机器人硬件的选择和设计,采用改进的DH建模方法进行了正逆运动学分析,并借助Matlab进行结果验证,确保机器人运动的准确性。
在软件设计方面,论文重点探讨了ROS的系统架构、话题和服务通信机制,以及Rviz和Gazebo等可视化工具的使用。特别是,通过Moveit!这一运动规划核心组件,实现了康复机器人的路径规划和控制。作者将机器人模型转化为URDF格式,并利用Solidworks的sw2urdf工具创建机器人描述文件,同时借助Moveit!配置助手完成系统配置。
论文的核心部分包括了针对机器人运动中可能遇到的干扰问题,引入了自适应迭代学习控制算法,以优化轨迹跟踪性能,确保康复动作的稳定性和精度。最后,通过实际实验验证了所设计的控制系统能准确执行预设的康复动作,且运行平稳,充分证明了其在康复机器人训练规划中的有效性。
这篇论文在上肢外骨骼康复机器人的控制系统设计中,结合ROS和Matlab技术,实现了康复训练的高效、个性化和精准,为提高脑卒中患者的生活质量提供了有力的技术支持。
山东建筑大学硕士学位论文
-5-
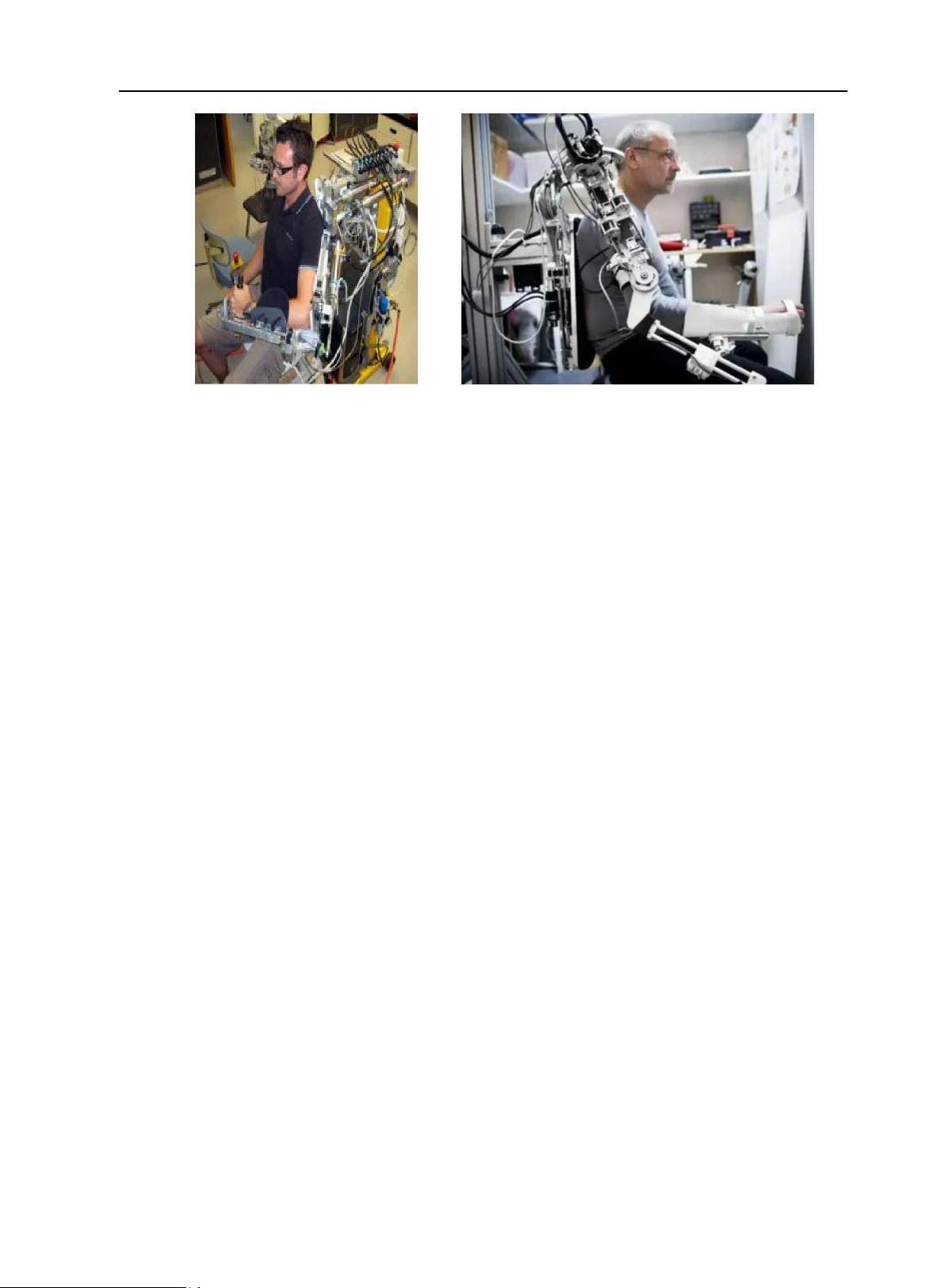
(a)T-WREX
(b)ABLE
图 1.5 T-WREX 和 ABLE
1.2.2 国内研究现状
国内的康复机器人研究从 20 世纪 90 年代开始起步,包括清华大学、哈尔滨工业
大学等开始了对上肢康复机器人的探索与研究
[27]
。其中,由清华大学设计制作的
UECM(Upper Extremity Compound Movements)辅助康复训练机器人(如图 1.6a),该机器
人末端使用连杆与患者的手腕部位相固定,使得患者能够在平面上进行 X 方向与 Y 方
向的两自由度运动,完成相应的训练动作。该装置设计相对简单,仅适用于早期的康
复训练,在一定程度上来维持患者的关节能动性
[28]
。
哈尔滨工业大学研发的由电机进行驱动的五自由度上肢外骨骼式康复机器人(如
图 1.6b),各个关节进行相互配合,实现了肩关节、肘关节和腕关节的单关节运动,以
及各关节协作的伸展、回撤和旋转动作,从而帮助患者模拟完成日常生活中多种运动
动作
[29]
。并在此康复机器人的基础上,研制了增加平衡装置的六自由度上肢康复机器
人,具有更好的训练效果。在上述研究的基础上,哈工大赵杰教授团队设计了一种七
自由度上肢外骨骼设计方案(如图 1.6c)。该方案使用了套索机构,使得驱动电机的布局
具有更好的灵活性,与六自由度机器人相比,添加了大臂旋转机构,增加了机器人的
灵活性。通过表面肌电信号对患者运动意图进行量化,可以在患病的各个阶段更好的
制定康复训练计划,更加精准的实现训练动作
[30]
。



剩余70页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2020-02-09 上传
2022-07-15 上传
2023-04-16 上传


xox_761617
- 粉丝: 27
- 资源: 7802
 我的内容管理
展开
我的内容管理
展开







最新资源
- WordPress作为新闻管理面板的实现指南
- NPC_Generator:使用Ruby打造的游戏角色生成器
- MATLAB实现变邻域搜索算法源码解析
- 探索C++并行编程:使用INTEL TBB的项目实践
- 玫枫跟打器:网页版五笔打字工具,提升macOS打字效率
- 萨尔塔·阿萨尔·希塔斯:SATINDER项目解析
- 掌握变邻域搜索算法:MATLAB代码实践
- saaraansh: 简化法律文档,打破语言障碍的智能应用
- 探索牛角交友盲盒系统:PHP开源交友平台的新选择
- 探索Nullfactory-SSRSExtensions: 强化SQL Server报告服务
- Lotide:一套JavaScript实用工具库的深度解析
- 利用Aurelia 2脚手架搭建新项目的快速指南
- 变邻域搜索算法Matlab实现教程
- 实战指南:构建高效ES+Redis+MySQL架构解决方案
- GitHub Pages入门模板快速启动指南
- NeonClock遗产版:包名更迭与应用更新
