西门子S7-1500/1200 PLC PID调试详解
"西门子S7-1500/1200 PLC的PID整定调试涉及控制器状态设置、采样时间选择、预调节过程、参数传送、手动输入参数以及在线与离线模式的影响。"
在工业自动化领域,比例-积分-微分(PID)控制器是广泛应用的控制算法,用于调整系统响应。西门子S7-1500/1200系列PLC提供了内置的PID功能,便于用户进行精准的控制。在初次使用时,需要理解以下几个关键知识点:
1. **控制器状态**:在开始PID整定前,控制器需处于“已禁用-非活动”状态。这意味着控制器不会影响过程变量,允许安全地进行参数调试。
2. **采样时间**:采样时间是PID算法更新其输出的频率,直接影响控制系统的响应速度。根据具体应用选择合适的采样时间至关重要,通常需要在快速响应和计算负载之间找到平衡。
3. **预调节过程**:在CPU运行状态下,选择合适的采样时间并开始预调节,这有助于系统自动调整PID参数。预调节结束后,必须点击“传送”按钮将优化的参数传送到控制器,确保参数生效。
4. **参数传送**:未点击“传送”按钮时,优化的PID参数仅存在于调试界面的监视值中,不会影响实际运行。点击后,参数会转移到启动值,即使离线下载并在线运行,也会应用这些参数。
5. **手动输入参数**:在离线状态下,可以手动修改PIDTemp数据块中的参数,如比例增益(P)、积分时间(I)和微分时间(D)。但需要注意,如果CPU已有监控值,离线修改的参数不会立即生效,除非在线状态下启用“启动手动输入”。
6. **在线与离线模式**:当CPU有PID监控值时,即使离线修改参数,CPU仍会按照监控值工作。只有在线状态下,手动输入的参数才会被接受并影响系统行为。
7. **快照和设定值**:在某些情况下,需要创建PID监控值的快照,并将快照的设定值作为初始值,这样才能确保新参数的正确应用。
8. **调试与趋势图**:通过观察PID调试界面的趋势图,可以实时监控系统响应,从而判断参数调整的效果,帮助进行进一步的优化。
9. **总结**:理解和掌握以上步骤与概念,是成功调试S7-1500/1200 PLC PID控制器的关键。在实际操作中,可能需要多次试验和调整,才能找到最佳的PID参数组合,实现系统的稳定和高效运行。
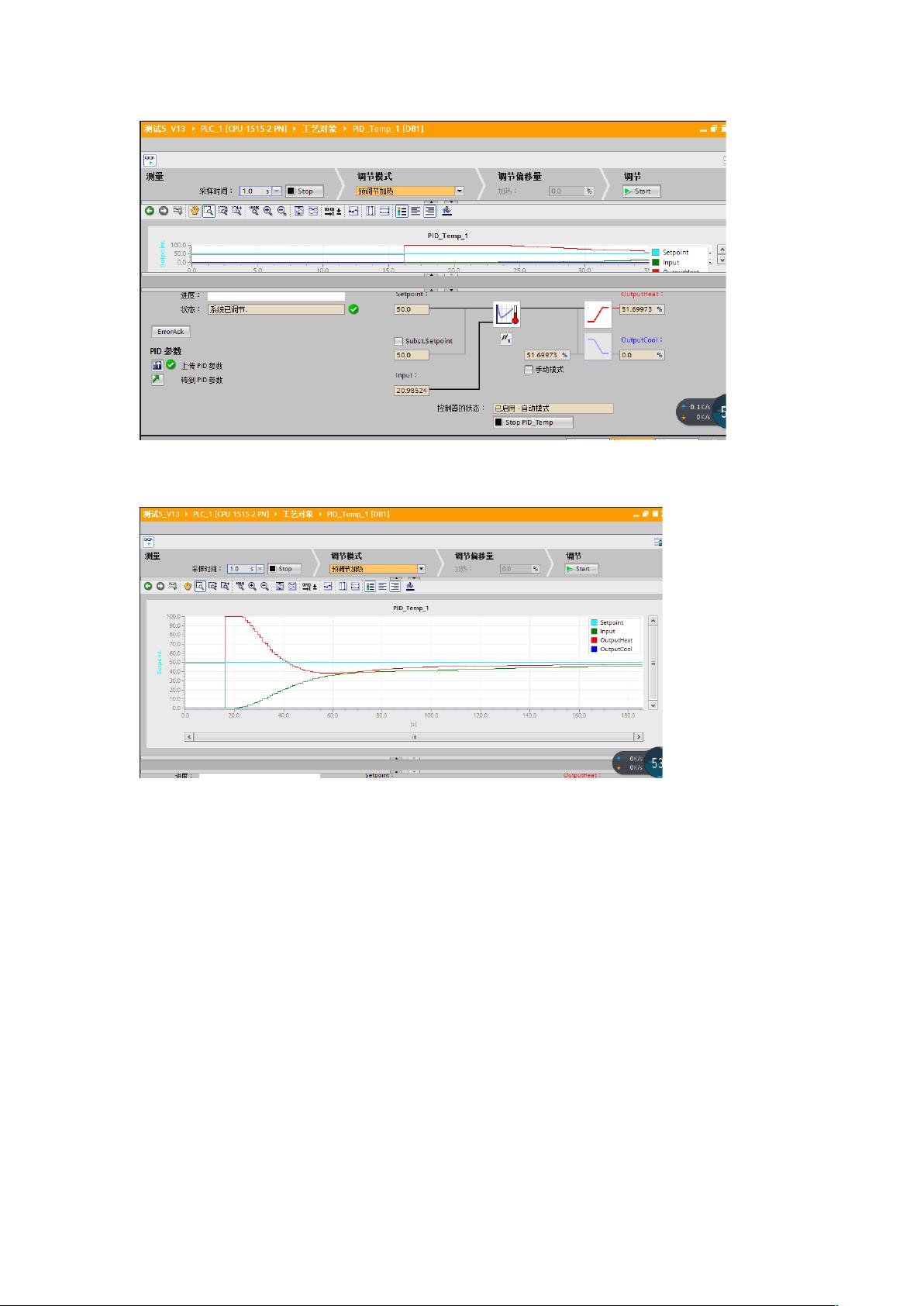
趋势图:
至此 PID 正常工作。
2. 手动 PID 部分。
离线,修改 PID Temp 组态 PID 参数部分勾选启动手动输入,修改比例增
益为 2.7(此处为示例),下载至 PLC 仿真器。
剩余20页未读,继续阅读
1000 浏览量
433 浏览量
357 浏览量
点击了解资源详情
点击了解资源详情
点击了解资源详情

super_包
- 粉丝: 5
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- bocluongya
- nuxt-windicss-module::leaf_fluttering_in_wind:Windi CSS for Nuxt.js:high_voltage:
- WebSocketDemo( C#+Html源码)
- 世界最高建筑排名
- 在Windows下创建grub2 BIOS版本和UEFI版本程序
- 巴特沃斯和切比雪夫:Filtros巴特沃斯和切比雪夫
- SRefresh:加载动画、上拉、下拉刷新
- dwm:我的dwm叉子
- 店长培训的9个关键内容
- OpenCV-3.4.5-MinGW32.rar
- loan
- OpenBee-开源
- 探查器
- 婴幼儿用品店:哪些人不适合开婴儿用品店
- poll3.0:新版课调系统
- 个人消费记录软件
