模糊H∞控制法抑制几何非线性压电柔性板振动
需积分: 8 127 浏览量
更新于2024-08-12
收藏 287KB PDF 举报
本文探讨了"几何非线性压电柔性板结构的模糊H∞振动控制"这一主题,针对具有大挠度且配备压电传感器和作动器的矩形板结构进行深入研究。研究者首先考虑了结构的几何非线性因素,采用广义傅里叶级数与数值积分相结合的方法,构建了非线性横向振动的动力学分析模型。这种方法能够精确地捕捉到柔性板在大变形下的行为。
接着,文章引入了Takagi-Sugeno(简称T-S)模糊建模技术,这是一种将复杂的非线性系统转化为模糊规则集合的建模方法。通过T-S模糊系统,研究人员设计了一种模糊H∞动态输出反馈控制律,这是一种先进的控制策略,能够在面对参数不确定性以及外部干扰时提供强大的鲁棒性。H∞控制法因其对系统稳定性和性能的优化特性,尤其在结构振动控制中表现出色。
仿真结果显示,使用T-S模糊模型设计的模糊H∞动态输出反馈控制律对于抑制几何非线性板结构的振动效果显著,而且相比于其他传统控制方法,如速度反馈控制器(VFC)、加速度反馈控制器(AFC)等,该控制律的计算量相对较小,便于实际工程应用。
总结来说,这篇文章结合了非线性动力学分析、模糊控制理论以及H∞控制方法,为压电柔性板结构的振动抑制提供了一种创新且实用的解决方案,这在航天技术中低刚度和柔性结构广泛应用的背景下显得尤为重要。通过这种方法,可以有效减少振动带来的影响,提高系统的稳定性和可靠性。同时,文中强调了计算效率,这对于实际工程中的实时控制有着重要意义。
振 动 与 冲 击
第 26 卷 第 2 期 JO U R N A L O F V IB R A TIO N A N D SH O C K V ol.26 N o.2 2007
几何非线性压电柔性板结构的模糊 H
∞
振动控制
基金项目: 国 防预研 基金 (51421060505 D Z0155)、陕西省自然科学基金(2005 A009) 和西安 电子 科技大学青年科研工作站项目资助
收稿日期: 2006 - 03 - 28 修改 稿收到 日期 :2006 - 04 - 25
第一作者: 徐 亚兰 女 ,1971 年 12 月 生
徐亚兰, 陈建军, 谢永强, 陈 龙
(西安电子科技大学机电工程学院,西安 710071)
摘 要
以具有带压电传感器和作动器的大挠度柔性矩形板结构为对象,考虑结构的几何非线性,利用广义傅里
叶级数与数值积分建立其非线性横向振动的近似动力学分析模型,进行结构的 Takagi-sugeno(简称 T-S)模糊建模,并在
此模型基础上设计一个对结构进行非线性振动控制的模糊 H
∞
动态输出反馈控制律,给出了仿真结果。结果表明:文中
利用 T - S 模糊模型设计的模糊 H
∞
动态输出反馈控制律对几何非线性板结构有很好的抑制作用,且给出的控制律其计
算量不大,易于实现。
关键词: 压电柔性板结构,Takagi-Sugeno 模糊建模,H
∞
输出反馈控制,线性矩阵不等式
中图分类号:TH113;TP13 文献标识码:A
随着航天技术的迅猛发展,低刚度与柔性化结构
的应用越来越广泛,使振动控制问题变得更为突出。
抑制振动 的一个有效方法是对结构进行主动振动控
制。结构的主动振动控制是基于使用传感器对结构响
应的检测,通过作动器对结构产生控制作用,从而达到
期望的动态特性要求。传统的主动控制方法有两类,
即前馈主动控制和反馈主动控制,前馈主动控制一般
应用于结构的干扰已知或可测的情况,特别是单频、周
期或窄频激励的情况。而反馈主动控制则经常用来控
制当外部扰动未知时结构系统的振动,这是目前广泛
使用的主动振动控制方法。在反馈控制中,速度反馈
控制器(V FC)、加速度反馈控制器(A FC )、位置正反馈
(PPF)、极点配置法、LQC 法、H
2
和H
∞
控制法等都是常
用的控制方法,它们主要用了线性系统的控制
[1 - 3]
。
H
∞
控制方法由于其对参数不确定及外部干扰具有强
鲁棒性,受到广泛关注。特别是,近年来,利用线性矩
阵不等式方法来研究 H
∞
控制问题引起了人们极大的
兴趣
[7 ]
,相关研究成果在结构线性振动控制中已有一
些应用
[8 ]
。
柔性结构振动时振幅往往较大,使得结构振动系
统呈现几何非线性,所以基于传统控制理论的线性控
制方法对非线性振动的控制效果不佳,从而降低了传
统控制理论用于柔性结构振动主动控制的有效性及其
应用范围
[4 - 5 ]
。模糊控制是以模糊逻辑为基础,基于
模糊规则的一种控制理论,已经成为实现非线性系统
控制的一种重要而又有效的方法。常规模糊控制的效
果很大程度上依赖于人们对受控过程知识的归纳和控
制经验的总结,对大型复杂的柔性结构进行控制时,很
难依据经验得出模糊规则及其相应的参数,所以模糊
控制理论应用于柔性结构振动控制只限于简单的未考
虑非线性振动的结构
[6]
。由 Takagi 和 Sugeno 提 出 的
T - S模糊系统模型可以通过模糊规则给出一个实际非
线性系统的局部线性表示,这样使人们可以根据系统
的非线性动力学模型,利用线性系统的方法设计一个
基于模型的模糊控制律
[9 ,10 ]
。
本文以具有压电传感器和作动器的柔性矩形板结
构为对象,考虑其几何非线性,建立其 T - S 模糊动力
学模型,并设计一个对结构进行非线性振动控制的模
糊H
∞
,动态输出反馈控制律,并给出了仿真结果。
1 几何非线性压电柔性板建模
1.1 非线性振动分析
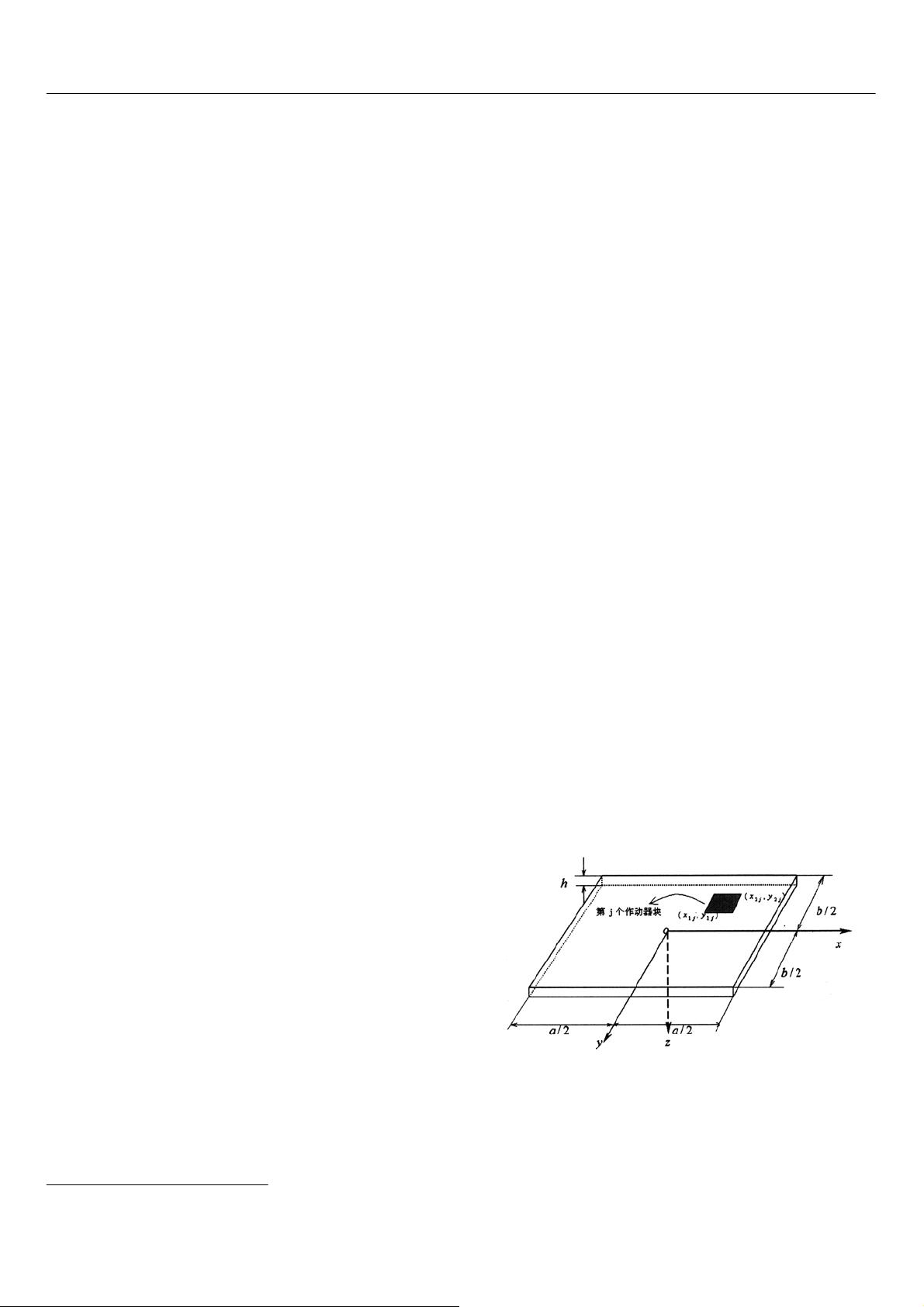
以如图 1 所示的带有 k 个压电作动器块的大变形、
小应变各向同性薄板横向振动为研究对象,振动过程
中结构为大挠度变形,从而产生几何非线性,
此时中面
图 1 带压电作动器块的柔性板
内所产生的薄膜应力不能忽略。板的几何尺寸为 a ×b
×h,第 j个作动器的几何尺寸为 a
aj
×b
aj
×h
aj
,其在板
上的位置如图所示,其上所施加的控制电压为 v
aj
。由
于压电作动器块的尺寸远远小于板结构,故这里忽略
下载后可阅读完整内容,剩余4页未读,立即下载
2021-09-10 上传
2021-09-10 上传
2021-05-15 上传
2021-05-10 上传
2021-05-24 上传
2021-06-12 上传
2021-05-17 上传
2021-04-25 上传
2021-05-19 上传

weixin_38622125
- 粉丝: 7
- 资源: 939
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++ Qt影院票务系统源码发布,代码稳定,高分毕业设计首选
- 纯CSS3实现逼真火焰手提灯动画效果
- Java编程基础课后练习答案解析
- typescript-atomizer: Atom 插件实现 TypeScript 语言与工具支持
- 51单片机项目源码分享:课程设计与毕设实践
- Qt画图程序实战:多文档与单文档示例解析
- 全屏H5圆圈缩放矩阵动画背景特效实现
- C#实现的手机触摸板服务端应用
- 数据结构与算法学习资源压缩包介绍
- stream-notifier: 简化Node.js流错误与成功通知方案
- 网页表格选择导出Excel的jQuery实例教程
- Prj19购物车系统项目压缩包解析
- 数据结构与算法学习实践指南
- Qt5实现A*寻路算法:结合C++和GUI
- terser-brunch:现代JavaScript文件压缩工具
- 掌握Power BI导出明细数据的操作指南
