D-S证据理论在多传感器信息融合中的应用探索
需积分: 9 105 浏览量
更新于2024-09-16
收藏 304KB DOC 举报
"DS证据理论在传感器融合技术中的应用,主要探讨了多传感器信息融合的原理、目标和层次划分,并提及了像素级、特征级和决策级的信息融合概念。"
多传感器信息融合技术是一种模拟人脑处理复杂问题的方法,尤其在IT领域中,这种技术被广泛应用于提升系统效能和准确性。在多传感器系统中,不同传感器提供的信息具有多样性,可能是实时或非实时的,精确或模糊的,以及可靠的或不可靠的。信息融合的目标是通过优化组合各传感器的数据,生成更全面、一致的环境描述,以实现整体系统性能的提升。
DS证据理论,或称为Dempster-Shafer理论,是信息融合的一种重要框架,尤其适用于处理不确定性、矛盾和不完整信息。在多传感器环境中,DS证据理论能有效地整合来自不同传感器的证据,解决数据之间的冲突,提高决策的准确性和可信度。这一理论通过合并多个证据源,生成一个更强大且全面的信念分布,从而帮助系统做出更好的决策。
信息融合的层次对于系统的架构和处理方法有着直接影响。通常,融合分为三个层次:
1. 像素级融合:这是最基础的层次,直接处理传感器的原始数据或初步处理后的信息,尽可能保留原始信息的完整性,以利于后续的分析。
2. 特征级融合:在这个层次,融合的是从原始数据中提取的特征信息,如颜色、形状、纹理等。特征级融合有助于减少数据量,同时保持对物体或事件识别的关键特性。
3. 决策级融合:这是最高层次的融合,涉及将不同传感器的决策结果进行整合,以得出全局最优的决策。在这个阶段,传感器可能已经识别出特定的对象或情况,决策级融合的任务是确保这些决策的一致性和可靠性。
通过这三层融合,多传感器系统能够有效地处理各种类型和来源的信息,克服单个传感器的局限性,从而实现更高效、准确的感知和理解环境。在实际应用中,例如自动驾驶汽车、无人机监控、军事侦察等领域,信息融合技术至关重要,DS证据理论为此提供了有力的理论支持。
D-S 证据理论在多传感器信息融合中的应用
王龙 SX1102022
1、多传感器信息融合简介
多传感器信息融合实际上是对人脑综合处理复杂问题的一种功能模拟。在
多传感器系统中,各种传感器提供的信息可能具有不同的特征:时变的或者非时
变的,实时的或者非实时的,快变的或者缓变的,模糊的或者确定的,精确的
或者不完整的,可靠的或者非可靠的,互相支持的或者互补的,也可能是互相
矛盾或冲突的。多传感器信息融合的基本原理就像人脑综合处理信息的过程一
样,它充分地利用多个传感器资源,通过对各种传感器及其观测信息的合理支
配与使用,将各种传感器在空间和时间上的互补与冗余信息依据某种优化准则
组合起来,产生对观测环境的一致性解释和描述。信息融合的目标是基于各传
感器分离观测信息,通过对信息的优化组合导出更多的有效信息,这是最佳协
同作用的结果,它的最终目的是利用多个传感器共同或联合操作的优势。来提
高整个传感器系统的有效性。
单个传感器信号处理或低层次的多传感器数据处理都是对人脑信息处理过程
的一种低水平模仿,而多传感器信息融合系统则是通过有效地利用多传感器资
源,来最大限度地获取被探测目标和环境的信息量。多传感器信息融合与经典
信号处理方法之间也存在着本质差别,其关键在于信息融合所处理的多传感器
信息具有更复杂的形式,而且通常在不同的信息层次上出现。这些信息抽象层
次包括检测级、位置层、属性层、态势层和威胁层。
多传感器信息融合的基本原理就是充分利用多个传感器资源,通过对这些传
感器及其观测信息的合理支配和使用,把多个传感器在空间或时间上的冗余或
互补信息依据某种准则来进行组合,以获得被测对象的一致性解释或描述,使
该传感器系统由此而获得比它的各组成部分的子集所构成的系统更优越的性能。
信息融合的层次主要研究在信息处理的哪个阶段上对多传感器信息进行综合
处理和分析。这一问题不但涉及处理方法本身,而且影响信息处理系统的体系
结构,是信息融合研究的重要问题之一。
目前,信息融合的层次划分是将信息融合划分为低层(象素级)、中层(特征
级)和高层(决策级)三个层次。
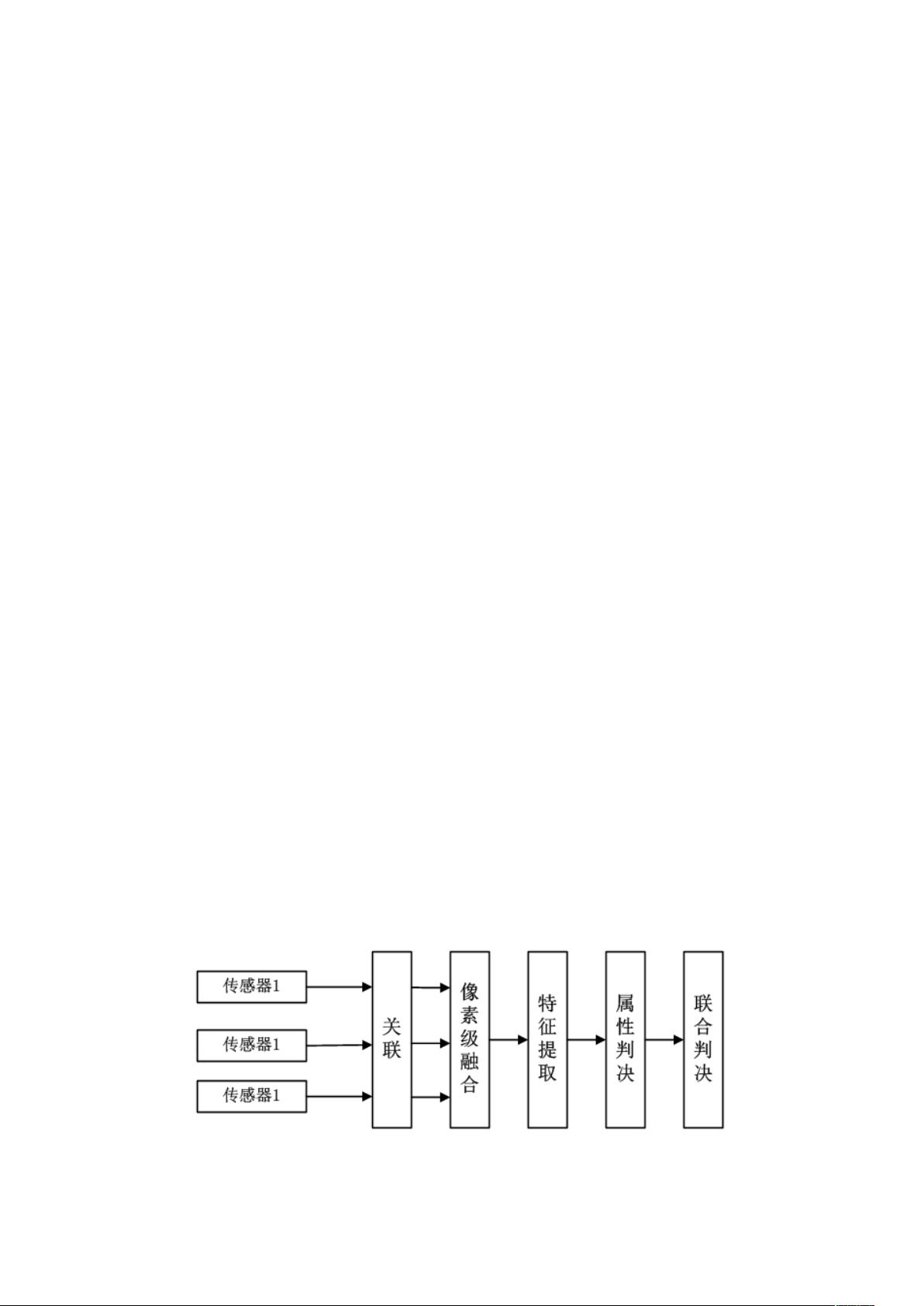
象素级融合是对传感器原始信息及处理的各阶段上产生的信息分别进行融
合处理,见图 1。其优点在于它尽可能多地保持了系统的原始信息。
图 1 像素级传感器信息融合
下载后可阅读完整内容,剩余7页未读,立即下载
286 浏览量
2024-08-25 上传
基于多目标多传感器融合技术的多轨迹跟踪器设计与实现,从零开始:构建高效多目标多传感器融合跟踪器及其算法原理解析,从零构建一个多目标多传感器融合跟踪器 多目标多传感器融合跟踪算法原理 ,多目标多传感器融
2025-02-16 上传
基于Matlab的IMU四元数姿态解算算法:融合三维向量数据与传感器融合技术实现精确姿态估计,基于Matlab的IMU四元数姿态解算系统:融合三维向量数据与传感器融合技术,37.基于matlab的IM
2025-02-12 上传

卡索-Builder
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- 易酷免费影视系统:开源网站代码与简易后台管理
- Coursera美国人口普查数据集及使用指南解析
- 德加拉6800卡监控:性能评测与使用指南
- 深度解析OFDM关键技术及其在通信中的应用
- 适用于Windows7 64位和CAD2008的truetable工具
- WM9714声卡与DW9000网卡数据手册解析
- Sqoop 1.99.3版本Hadoop 2.0.0环境配置指南
- 《Super Spicy Gun Game》游戏开发资料库:Unity 2019.4.18f1
- 精易会员浏览器:小尺寸多功能抓包工具
- MySQL安装与故障排除及代码编写全攻略
- C#与SQL2000实现的银行储蓄管理系统开发教程
- 解决Windows下Pthread.dll缺失问题的方法
- I386文件深度解析与oki5530驱动应用
- PCB涂覆OSP工艺应用技术资源下载
- 三菱PLC自动调试台程序实例解析
- 解决OpenCV 3.1编译难题:配置必要的库文件
