机器人超声波避障与路径规划技术
版权申诉
"小车自动避障及路径规划"
在这一文档中,主要探讨了小车自动避障及路径规划的系统设计,包括硬件和软件的架构以及超声波测距的原理。首先,系统的核心是超声波测距技术,通过分布的传感器来探测障碍物并实现避障功能。
3.1 机器人总体硬件设计
硬件设计中,小车的避障系统关键在于传感器的布置。八个超声波传感器被均匀地分布在机器人四周,每对相邻传感器之间形成45度角,确保全方位的障碍物检测。这些传感器以程序运行周期为单位,循环进行测距,以防止相互干扰。硬件总体框架图显示了单片机如何处理超声波信号,调用避障子程序,将数据传递给电机和LED显示器的驱动程序,最终由电机执行转向指令,显示结果在LED屏幕上。
3.1.3 避障系统总体软件框架图设计
软件方面,超声波避障程序是主程序的一个子程序,它在主程序运行时被调用。当避障程序被触发,小车会进行轨迹规划,然后将处理后的数据转化为电机指令,控制小车避开障碍物。具体程序设计将在第四章详细阐述。
3.2 超声波测距原理
超声波测距基于压电效应,传感器能够将电能转化为超声波发射出去,再将接收到的回波转化为电信号。通过测量超声波从发射到反射回来的时间(TOF),乘以声速,可以计算出与障碍物之间的距离。公式为:D = ct/2,其中D是距离,c是超声波速度(通常取340m/s),t是超声波往返的时间。
4.1 轨迹规划算法的实现方案
虽然文档在此处戛然而止,但可以推断第四章将详细讨论如何实现小车的路径规划算法,这可能涉及到搜索算法、实时避障策略以及最优路径选择等内容。
这份文档提供了关于小型机器人避障系统设计的关键信息,涵盖了硬件配置、软件架构以及核心的超声波测距技术,为实现小车的自主导航和避障功能奠定了基础。后续的轨迹规划算法则是保证小车能够智能地在复杂环境中安全行驶的重要组成部分。
精品好资料——————学习推荐
(2) 机器人的速度 v,测量后设为定值使用。
(3) 周期 T,直接设置为定值使用。
(4) 偏转角 de,可通过机器人与横坐标之间的夹角 pe,减去机器人到目
标点连线与横坐标的夹角 E 得到。
(5) 终止信号 last 值先置为 0,当到达目的地时,将其置为 1。
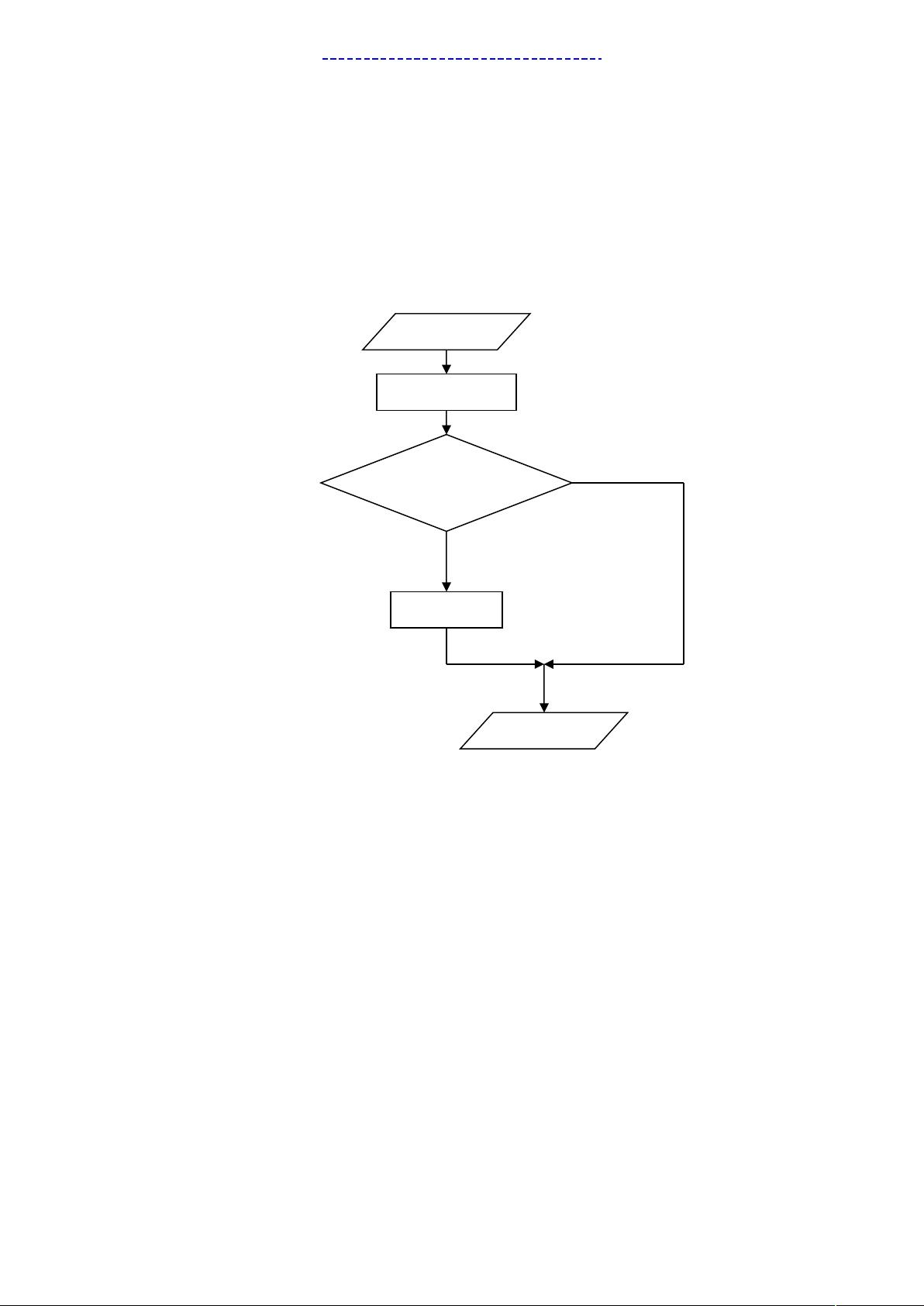
基础控制层程序流程图如下:
图 4.1.1 基本控制层程序流程图
4.1.2 行为控制层
行为控制层是比基本控制层更复杂,更具有决定权的层次。它的存在决定
了机器人智能避障行为的可行性,是相当重要的算法层。其主要任务是让机器
人根据超声波传感器采集的距离信息判断是否该进行避障行为,且给出避障的
转角值,及转向。这些都以左右综合距离的大小决定,当左边综合距离大于友
边综合距离时,可认为左边的斥力值大与右边斥力值,机器人左转,反之,右
转。当前方综合距离小于设定的最小允许接近距离,而左右综合距离又相等时,
则需要设置专门的转角,对机器人施行强制性转角动作。
据此,可将各控制变量之间的关系以数学公式的形式列出,并做为“人工势
场法”的基本数学模型被运用于程序流程图设计。
5 / 24
数据读入 1
计算偏转角 de
判断是否到达
目标
将 last 值 置
1
数据输出 2
Y
N
剩余23页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-07-04 上传
2021-10-07 上传
2021-09-24 上传
2022-07-04 上传
2022-07-16 上传

love1987421
- 粉丝: 1
- 资源: 7万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular实现MarcHayek简历展示应用教程
- Crossbow Spot最新更新 - 获取Chrome扩展新闻
- 量子管道网络优化与Python实现
- Debian系统中APT缓存维护工具的使用方法与实践
- Python模块AccessControl的Windows64位安装文件介绍
- 掌握最新*** Fisher资讯,使用Google Chrome扩展
- Ember应用程序开发流程与环境配置指南
- EZPCOpenSDK_v5.1.2_build***版本更新详情
- Postcode-Finder:利用JavaScript和Google Geocode API实现
- AWS商业交易监控器:航线行为分析与营销策略制定
- AccessControl-4.0b6压缩包详细使用教程
- Python编程实践与技巧汇总
- 使用Sikuli和Python打造颜色求解器项目
- .Net基础视频教程:掌握GDI绘图技术
- 深入理解数据结构与JavaScript实践项目
- 双子座在线裁判系统:提高编程竞赛效率
