




PID控制算法详解与应用
需积分: 13 54 浏览量
更新于2024-07-25
收藏 5.84MB PDF 举报
该资源详细介绍了PID控制算法及其在各种情况下的应用与变种,包括基本的PID控制原理、数字PID控制的实现方式、不同类型的PID控制算法仿真,以及PID控制在实际系统中的应用,如单回路、串级控制,针对纯滞后系统的控制策略,还有专家PID、模糊PID和神经PID控制等智能控制方法。
PID控制算法是自动控制理论中最为经典的控制策略,由比例(P)、积分(I)和微分(D)三个部分组成。比例项P对应于当前误差的直接影响,积分项I考虑了过去误差的累积,微分项D则预测未来误差的变化趋势,三者结合可以实现对系统动态性能的有效调节。
1. PID控制原理:PID控制器通过调整这三个参数来调整输出,以使系统的实际输出尽可能接近期望值。比例参数P主要影响系统的响应速度,积分参数I用于消除稳态误差,微分参数D则有助于减小超调和振荡。
2. 数字PID控制:在数字系统中,PID算法通常需要转换为离散形式,如位置式、增量式和抗积分饱和等形式,以适应数字计算环境。
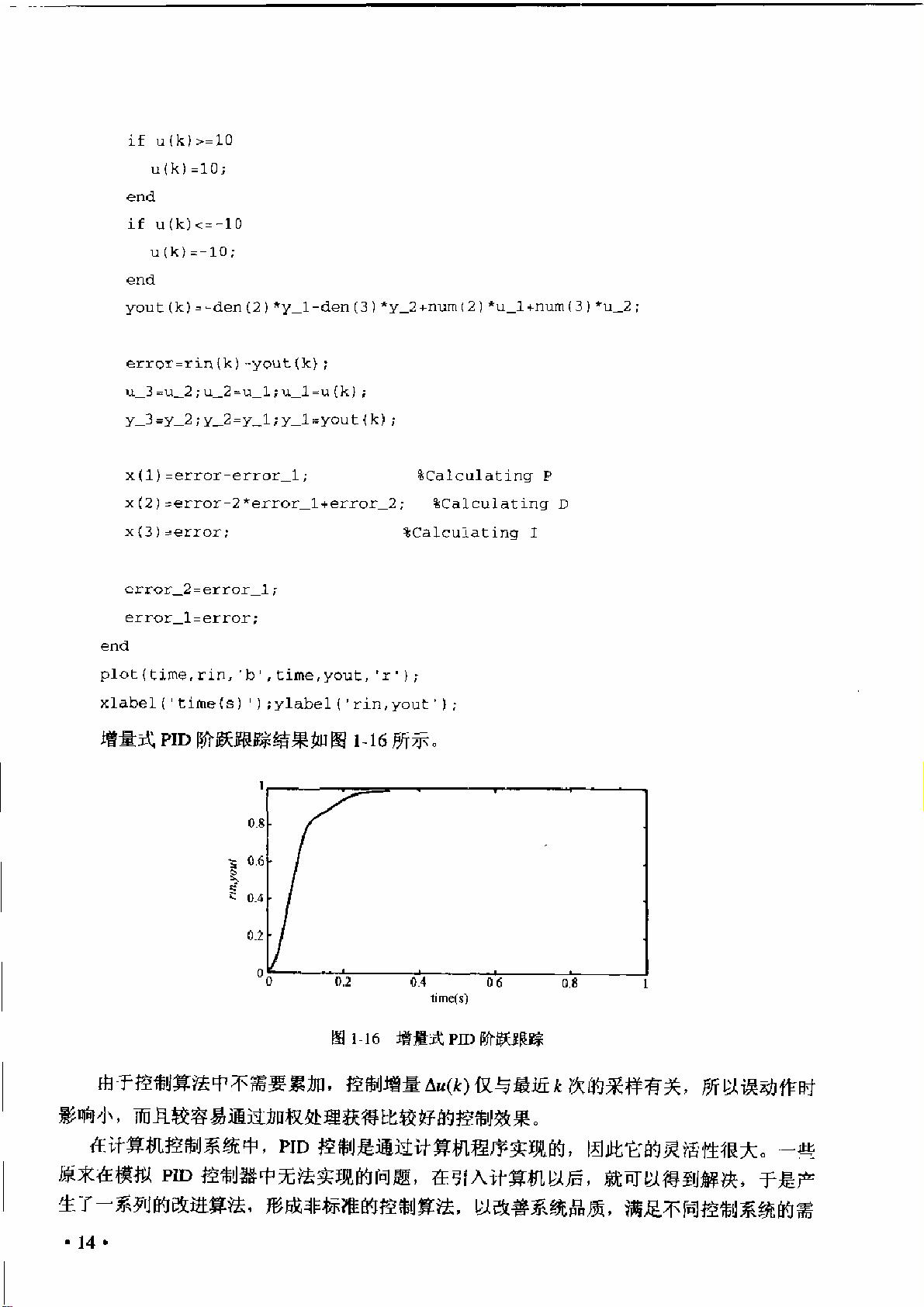
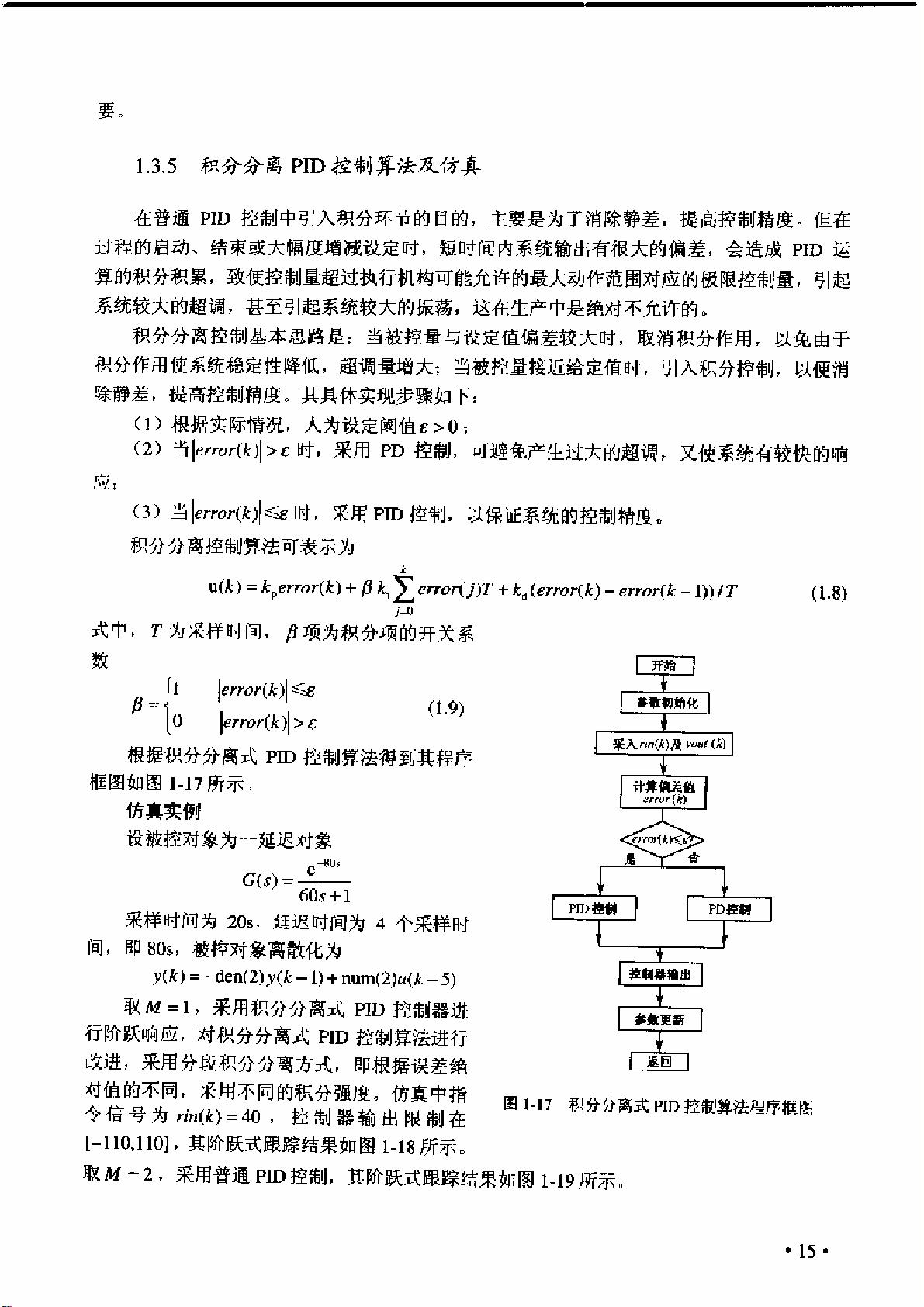
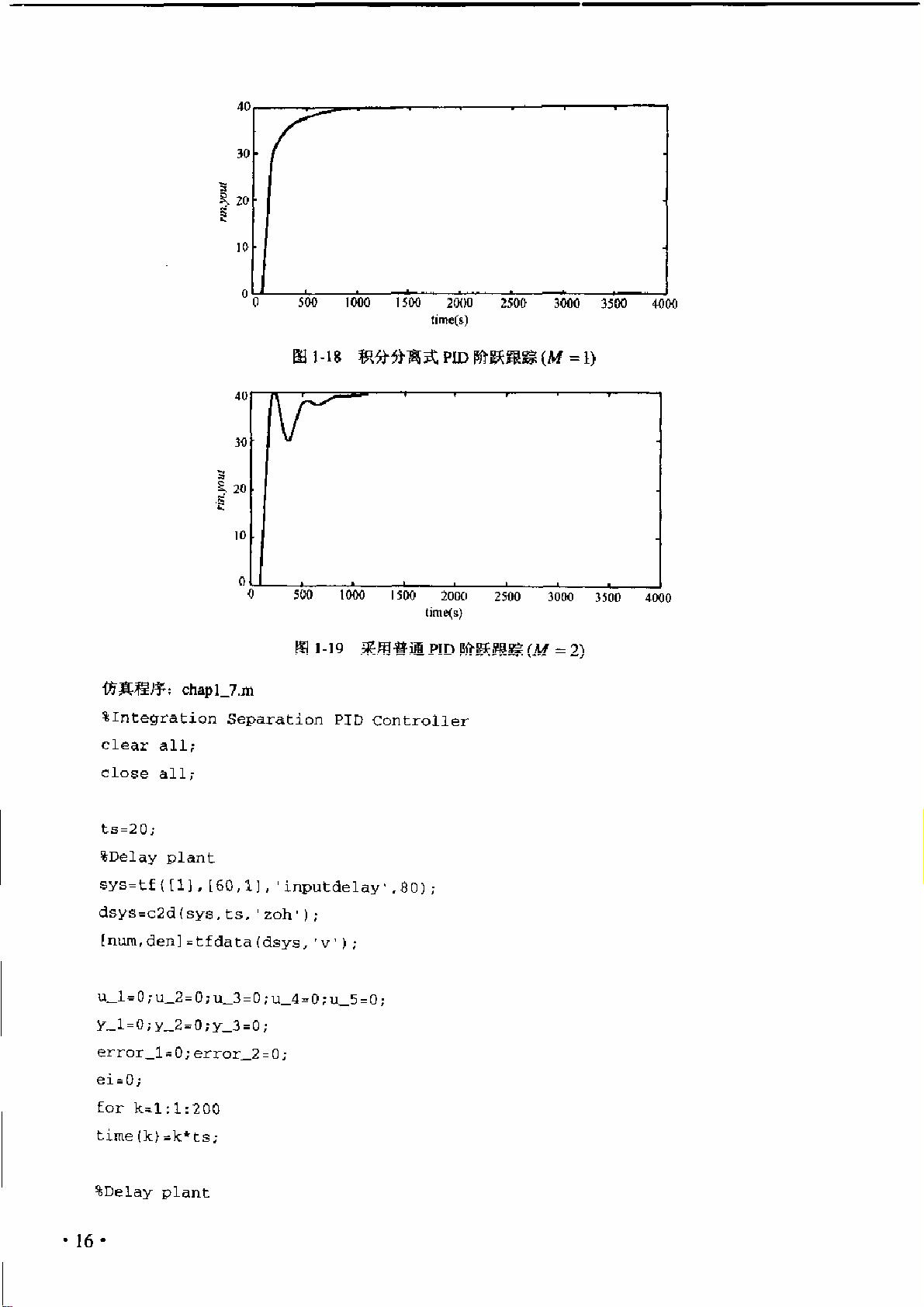
3. PID的变种控制算法:包括积分分离、梯形积分、变速积分、带滤波器、不完全微分、微分先行、带死区控制以及基于前馈补偿的算法等,这些变种旨在优化特定系统的控制性能。
4. 单回路与串级PID控制:单回路PID适用于简单控制任务,而串级PID控制则引入了主副控制器,能有效应对多变量复杂系统,提高控制精度。
5. 纯滞后系统的控制:大林控制算法和Smith预估控制是针对具有显著纯滞后特性的系统的解决方案,它们通过预测系统行为来改善控制效果。
6. 专家PID和模糊PID控制:这些智能控制方法利用专家知识或模糊逻辑来动态调整PID参数,以适应系统变化,提高控制性能。
7. 神经PID控制:基于神经网络的PID控制利用学习算法(如BP、RBF神经网络)进行参数整定,实现自适应控制,提高了系统鲁棒性和适应性。
这个资源涵盖了PID控制算法的广泛内容,不仅包含基础理论,还包括多种实际应用和优化策略,对于理解和应用PID控制技术具有极高的参考价值。
1263 浏览量
406 浏览量
2350 浏览量
798 浏览量
2144 浏览量
1750 浏览量

wixinxin
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- 开源飞机大战游戏素材及源码解析
- ADINA84编译通过文件的公开源代码解读
- UL认证申请资料清单与指南
- 2005年哈尔滨工业大学数学建模优秀论文集锦
- Gradle插件导出可执行jar的新版本发布
- 经典FPGA学习书籍《深入浅出玩转FPGA》全集
- 360云引擎免杀技术深度解析
- Thinkserver RD450 32位系统驱动安装指南
- 欧洲城市化程度数据集 - JRC城市比例分析
- 动态aspx转换为静态页面的实现方法
- Objective-C排序技巧:数字、字符串与数组
- SST51单片机驱动安装及快速烧录操作指南
- name-genius.zip:开源项目随机用户生成工具
- 城市景观图像对数据集:语义分割任务的最佳选择
- 计算机C级考试模拟软件:破解密码,高效备考
- 层次分析法AHP在Excel中的应用详解






















